

ABB机器人程序和功能的应用
机器人
描述
ABB机器人的例行程序可以分为三种类型;程序、功能、中断,本章主要分享一下程序和功能的用法。
例行程序结构
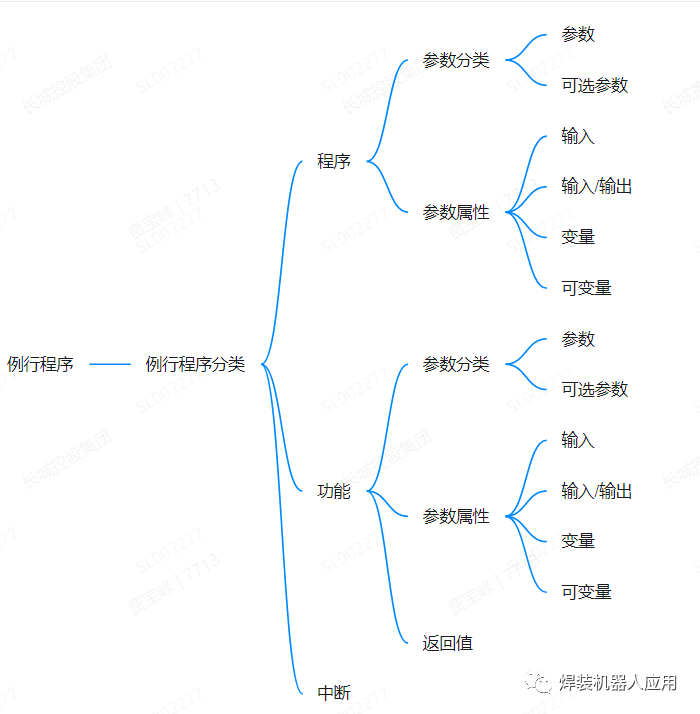
一、四种参数的添加和使用
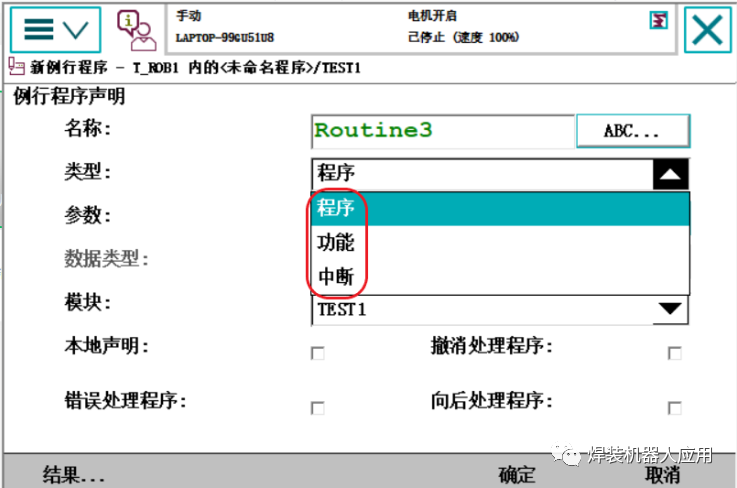
程序和功能的参数用法相同这里以程序为例,在新建例行程序过程中有三种类型可以选择;这里以程序为例,选择程序,填入名称,注意名称不可以用数字开头。
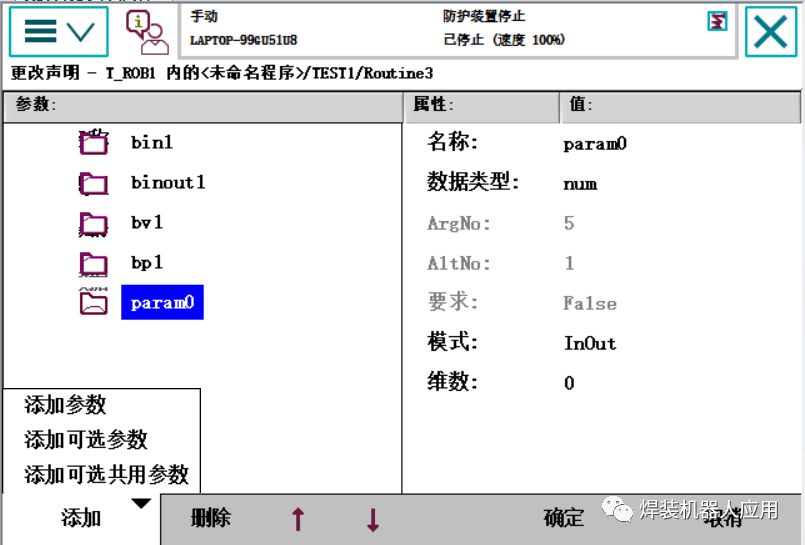
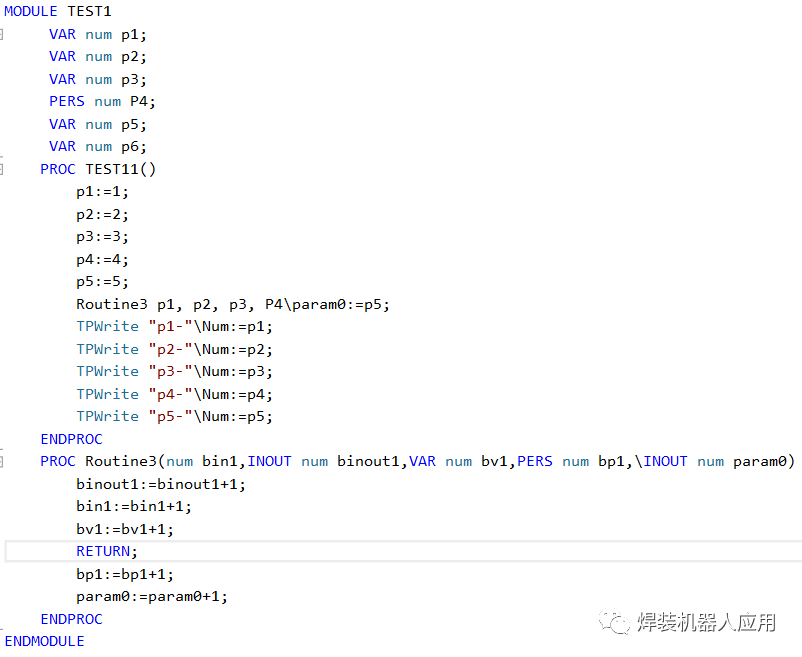
2、添加参数点击参数,输入、输入/输出、变量、可变量,四种参数模式各增加一个,另外加一个可选参数。
3、对“TEST1”模块进行编程入下:每一个参数在Routine3中都增加1
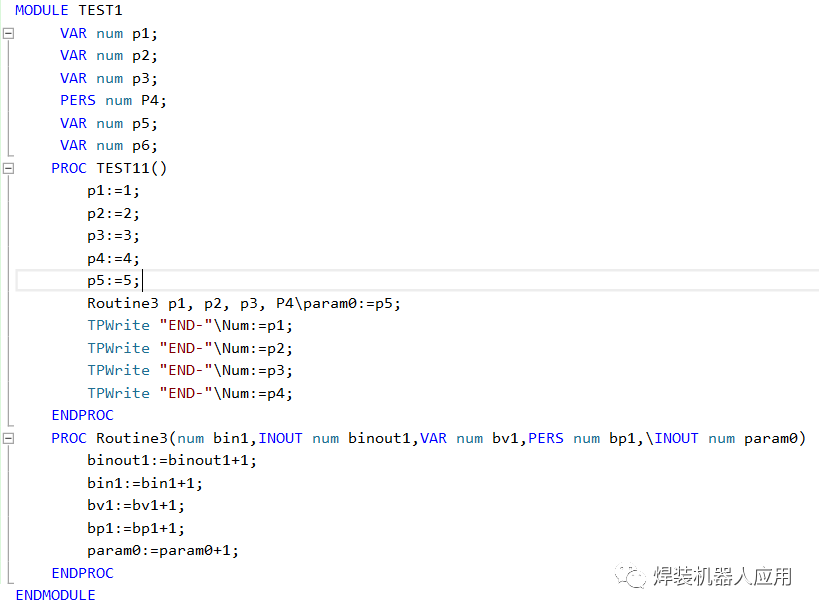
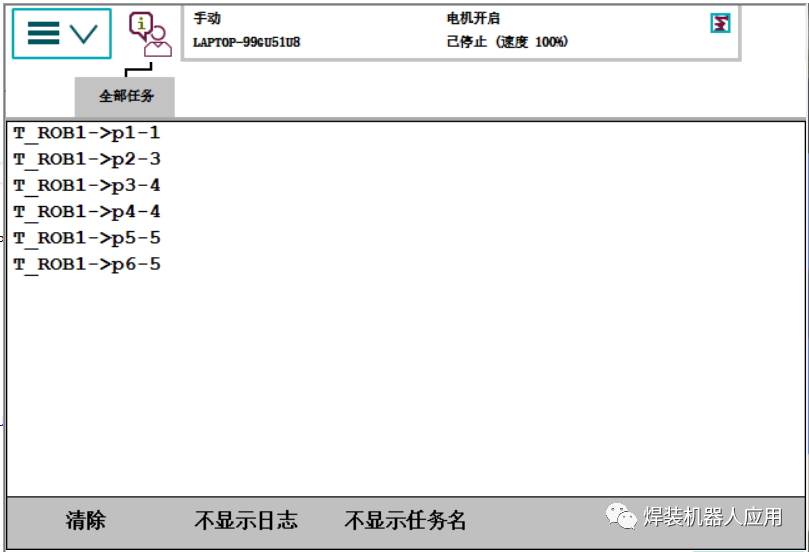
运行结果如下:
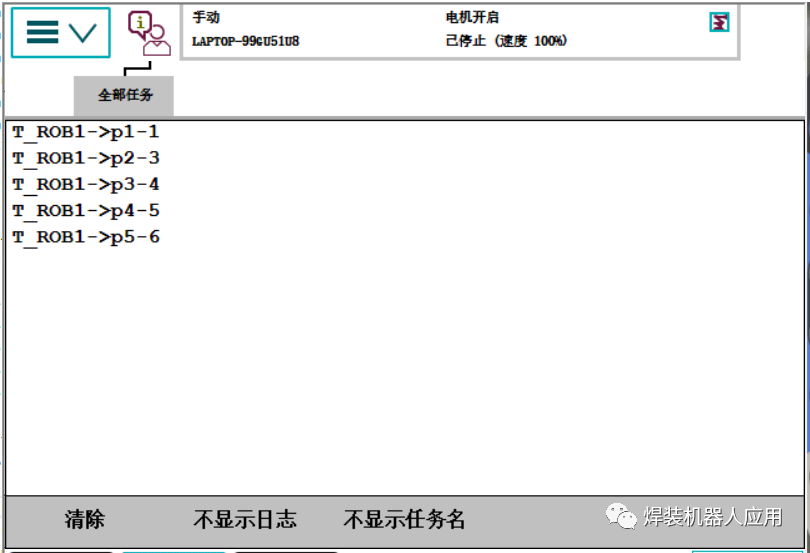
通过运行结果得出;
bin1:类型为In(输入),对应的参数p1在程序Routine3运行完成后结果没有变化,说明当类型为IN(输入)时只读取变量的值。
binout1:类型为InOut(输入/输出),对应的参数p2在程序Routine3运行完成后结果加一,说明当类型为InOut(输入/输出)时既读取变量的值也将新的运算结果写入到变量中,VAR(变量)和PERS(可变量)也是如此。
二、“RETURN”指令在程序中的作用
例如:在“Routine3”程序中增加“RETURN”指令
测试运行结果P4和P5的值无变化
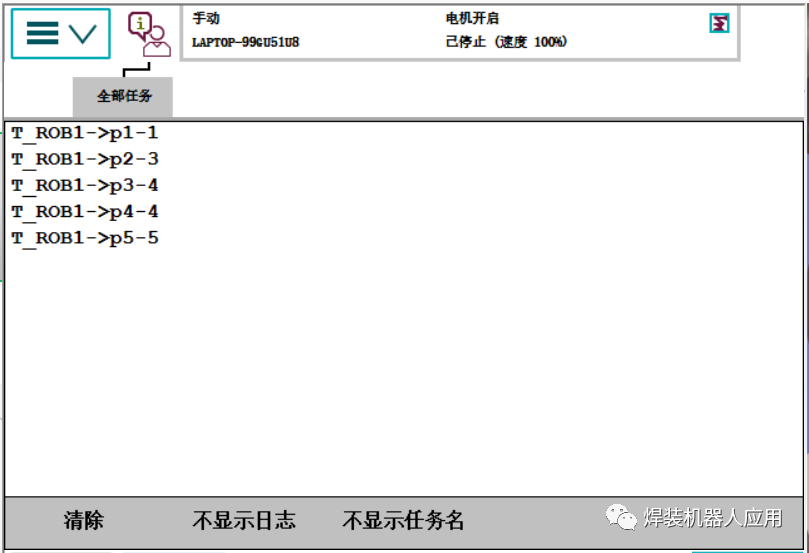
说明:“RETURN”指令在程序中的作用是中断当前程序的执行,返回调用该程序的下一行继续执行。
三、 “R****ETURN”指令在功能中的作用
将“Routine3”的类型由程序改为功能,程序和功能除了声明的关键词不同外还有以下几点区别;
1、功能名称前有该函数返回值的数据类型
2、“RETURN”指令在功能中必须添加而且要在后面指定返回值
3、调用方式不同,功能通过赋值指令“:=”调用
例如下图:更改为功能后的程序
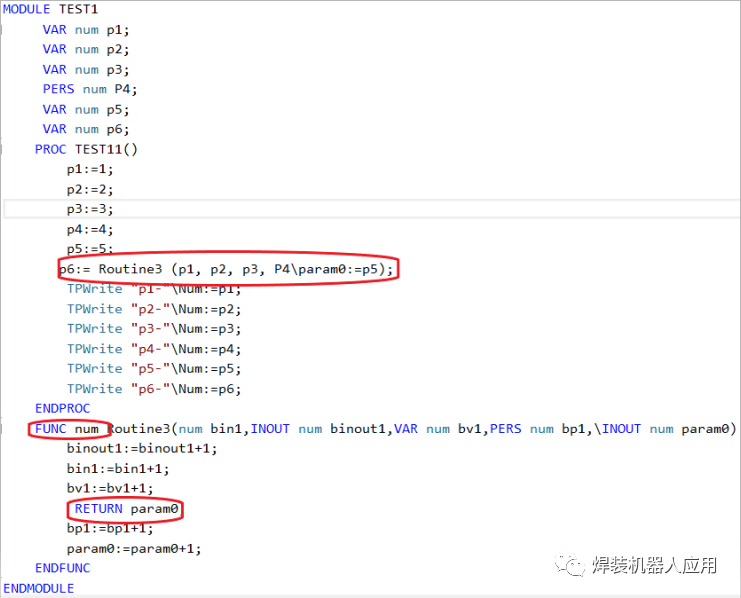
测试运行结果P4和P5的值无变化,p6与p5相同。
说明:“RETURN”指令在功能中除了拥有中断当前功能返回调用该程序的下一行继续执行的作用外,还有指定返回值的功能。
-
abb机器人的基本配置包括哪些2024-06-17 3745
-
abb工业机器人的编程语言是什么2024-06-16 7515
-
ABB机器人程序结构总结2023-05-25 9353
-
ABB机器人线速度_青岛ABB机器人发生电源故障维修2022-01-11 2472
-
ABB机器人伺服电机维修常见故障是什么?2021-09-29 3005
-
ABB机器人实训平台实验2021-07-01 2780
-
ABB的协作机器人强势登场2021-03-06 7640
-
ABB机器人发生不一致路径精确性故障维修2020-09-09 2445
-
ABB机器人维修保养指南2020-08-19 6033
-
ABB机器人与单片机的数字通讯2017-10-28 5044
-
ABB焊接机器人问题2017-10-16 5658
-
ABB机器人程序指令汇总2015-12-23 1861
-
ABB IRB5400-喷涂工业机器人2015-01-14 10150
全部0条评论

快来发表一下你的评论吧 !
