

激光点云感知三维空间介绍
描述
点是描述地理空间的最小单元,世间万物都可以通过一系列具有三维坐标和属性的点来刻画,形成我们肉眼所见的世界。二维的点集可以形成图像和照片,三维的点集则可以逼真地还原我们所处的三维空间,形成数字城市、数字地球等,产生让人们犹如置身其中的沉浸式体验。
这些点是怎么获取、又是怎样具有时空信息的呢?这就离不开为我们精准感知世界提供“慧眼”的激光雷达。那么,什么是激光雷达,它是如何工作来获取万物之点呢?
什么是激光?
“激光”来自英文“LASER”,也有译为“镭射”,是Light Amplification by Stimulated Emission of Radation的缩写,即受激辐射的光放大。1916年爱因斯坦发现了激光的原理——原子受激辐射的光,即原子中的电子吸收能量后从低能级跃迁到高能级(受激吸收)、再从高能级回落到低能级时所释放的能量以放大了的光子形式发出(受激辐射),这个被放大的光就是激光。1964年我国科学家钱学森建议将“光受激辐射”改为“激光”。
一提到激光,很多人会想到激光武器、激光手术、激光焊接和切割等,似乎激光是一种对人体具有极大杀伤力的光。其实,激光也分等级,功率越低对人眼越安全,因此人们利用低功率激光生产激光电视、进行激光雷达测绘等。本文主要介绍对地观测激光雷达的相关知识。
什么是激光雷达?
激光雷达,英文为Light Detection And Ranging,简称LiDAR,即光探测与测距。光探测首先需要一个激光源,即激光器发射高频率激光脉冲到被测物的表面;其次是接收系统,即接收物体表面反射的激光脉冲并对回波进行处理,一般由望远镜和各种光电探测器组成,通过测量激光发射到接收经过的时间,结合光速即可计算出被测物体相对于探测器的距离。
激光雷达怎么获取点的空间位置及几何信息呢?这就需要全球卫星导航定位系统(GNSS)来提供地球表面或近地空间任何地点的三维坐标和时间信息,如我国的北斗卫星导航系统(BDS)、美国的GPS等,以及监测搭载激光雷达系统平台姿态的惯性测量系统(Inertial Measurement Unit,简称IMU)。GNSS和IMU集成为导航定位定向系统(Position and Orientation System, POS),提供激光雷达系统的空间位置和姿态信息。可见,激光雷达集激光器系统、全球定位系统和惯性导航系统于一身(图1),是当前直接快速获取探测目标空间位置及其几何信息的最有效手段之一。
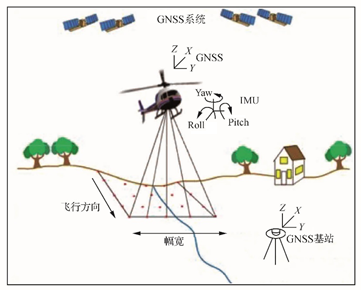
图1机载激光雷达系统组成
激光雷达如何工作?
激光雷达名字高大上,工作原理却很简单。激光器向目标物发射一束很窄的激光脉冲,部分脉冲在地物表面被反射后由接收器接收,系统通过记录激光脉冲从发射到返回的时间间隔t(Time of Flight, TOF)来计算激光器和目标之间的距离R,R=½·c·t(c 为光在空气中的传播速度)。利用距离R 和扫描角,结合POS系统测量的激光雷达系统的位置和姿态数据,通过坐标解算即可得到被测物及周围环境各点在地理空间参考下的三维坐标,这些带有xyz坐标的点在三维空间呈离散分布,人们形象地称为“点云”(图2),可在点云数据处理软件(如点云魔方等)进行三维显示、量测、建模以及多行业应用等。
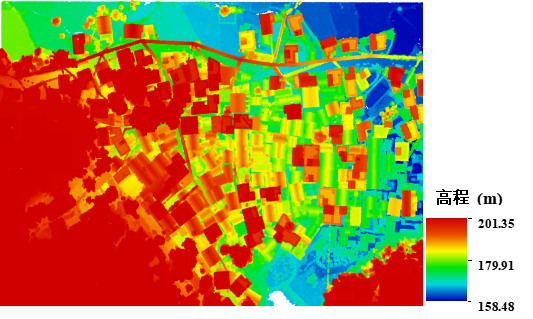
图2 原始点云数据按高程显示
常见的激光雷达有哪些?
激光雷达种类很多,按照不同分类方法介绍如下:
(1)按照搭载平台可分为星载、机载和地基激光雷达(图3)。其中星载激光雷达主要以卫星、航天飞机、空间站等为平台,观测范围和应用尺度广,多用于科学研究,如美国的ICESat、ICESat-2和我国陆地生态系统碳卫星“句芒号”;机载主要以固定翼飞机、直升机、无人机等为平台,适合长距离线状地物三维信息获取;地基包括三脚架、车载、背包、手持以及船载等,特点是获取数据全面、方式灵活。

图3 不同平台激光雷达系统
(2)按照测距模式可分为脉冲式和相位式激光雷达。前者利用激光脉冲在发射和接收信号之间往返传播的时间差进行测量,直接、测量距离长。相位式是一种间接方式,利用电波频率对激光波束进行幅度调制,测定调制光往返观测目标一次所产生的相位延迟,根据波长计算该延迟所代表的距离,测距相对较短,但脉冲频率和获取的点精度更高。
(3)按照光斑大小可分为大光斑和小光斑激光雷达,前者光斑直径通常超过10m,目前主要是指星载激光雷达系统,如美国ICESat/GLAS(Geoscience Laser Altimeter System)光斑直径约70m、我国高分七号获取的光斑直径约17m,缺点是点密度低、无法成像,但可获取全球范围的数据,在大尺度地学应用方面有优势。小光斑激光雷达光斑直径为厘米甚至毫米级,点密度和精度高,通常可以成像,主要指机载和地基激光雷达系统。
(4)按照探测与记录方式可分为离散点云、全波形和光子计数激光雷达。离散激光雷达最为普遍,商业化应用广泛,如数字城市中的建筑物三维重建、文化遗产数字化和重建等。全波形激光雷达对回波进行连续采样,记录信息更为精细,能获取目标完整的垂直剖面信息,广泛应用于林业调查,如ICESat/GLAS、GEDI以及部分地基/机载LiDAR等。光子计数激光雷达不同于前两者,采用微脉冲激光器和高灵敏度光子探测器,将回波信号(单光子级别)计数为光子点,优点是利用较低的激光能量获取远距离空间目标信息,如目前在轨的ICESat-2/ATLAS。
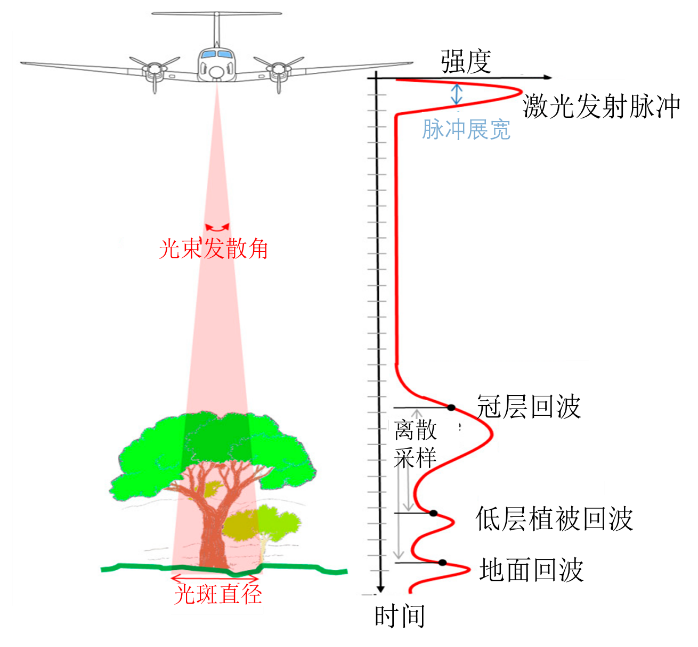
图4 全波形LiDAR工作示意图
激光雷达有什么优缺点?
激光雷达优点很多,相对于被动光学遥感,首先它主动发射激光脉冲,可以在夜间工作;其次获取三维信息直接快速,高频率激光脉冲具有一定穿透性,可以穿透森林冠层到达林下,获取林下地形信息,用于林业调查、密林考古等;此外蓝绿激光(通常采用532nm波长)还可以穿透一定深度的水体,获取水下地形及水质情况,用于岛礁水深测量、近岸水下考古等。
虽然激光雷达有很多优点,但在大雨、浓雾、浓烟等环境下系统发射的脉冲会急剧衰减,导致获取的数据质量下降或者数据缺失。同时激光点云离散分布,目前以单波长激光雷达系统为主,在光谱和纹理信息获取方面比传统的被动光学影像稍逊色。
激光雷达能干啥?
激光雷达的应用非常广泛,如基础测绘、林业调查、无人驾驶、室内建模、数字城市、电力巡检、交通选线、文化遗产保护等,在极地冰盖、海洋、陆地,大气层、月球、火星表面测绘中,都有激光雷达的身影。
(1)基础测绘:星载激光雷达可获取亚米级高程信息,为制作全球、月球表面高精度控制点提供支持。机载激光雷达获取的高密度点云经过处理,可生成数字高程模型(DEM)、数字线划图(DLG)、等高线等,为其他应用提供基础测绘数据。
(2)林业调查:激光雷达可以获取植被冠层高密度点云,高频率激光脉冲可穿透植被冠层到达地面,不仅可获取精细的冠层垂直结构信息,还可得到林下地形信息,进而提取树高、冠幅、叶面积指数、生物量等,为森林碳汇模型提供输入。
(3)数字城市:机载、车载激光雷达可快速获取城市中各种构筑物及周围环境完整的三维点云数据,构建的三维数字模型可置于网络中,实现数字化管理及交互呈现,让用户有沉浸式体验,这也是当前“实景三维中国”的重要内容。
(4)数字电网:激光雷达可在线路设计、电力设施数字化、危险点检测、预警分析、变电站数字化与管理等方面发挥作用,如线路安全巡检中,基于三维点云可精确探测电力线、电力塔的空间位置及其与线下地表面、植被的空间距离,进行电力线与地物、电力线档距、线下植被的安全距离分析,还可结合杆塔上的温度、风速等数据,模拟不同工况下电力线弧垂变化等。
(5)文化遗产数字化与保护:激光雷达获取遗产本体高精度高密度点云,结合其携带的高分辨率数码相机获取遗产特征信息,构建真三维数字模型,进行数字化展示与保存;还可对考古现场进行数字化记录、对出土文物进行量测和数字修复等;在密林考古中获取林下地形信息,结合历史资料分析古遗址古环境等。
(6)无人驾驶:安装了激光雷达的无人车在行驶中,激光脉冲遇到障碍物后会返回,系统计算与目标间的相对距离,帮助汽车自主感知道路环境和避障。同时激光雷达可以准确测量视场中物体轮廓边缘与车身的相对距离,并通过三维建模绘制3D高精地图,为无人车“开路”。
(7)交通线路规划:激光雷达不同于单点定位方式,通过扫描获取的高密度高精度点云可提供公路全景三维数字模型。铁路隧道施工中可利用激光雷达进行断面图生产,爆破面积与体积、开挖土方量计算,开挖隧道壁的平整度分析、超欠挖、隧道掘进方向检校等。
(8)矿山监测:矿山特别是露天矿的开采规模和深度不断扩大,给矿区边坡、土体等稳定性带来威胁。激光雷达将点测量扩展到面测量,深入复杂环境中直接获取这些大型、复杂实体的完整三维空间数据,并快速重构目标的三维模型,通过多时相监测获取矿体的变形信息,为矿区安全监测提供支持。
(9)近岸水深与水底地形测量:532nm波长的激光脉冲(蓝绿激光)可以穿透一定深度的水体获取水深及水底地形信息,成为海岸线变化监测、湖泊水位测量、水下考古等的重要技术手段。
除了上述应用,激光雷达还可用于极地冰盖、高原冰川高度及消融变化监测、高铁/地铁轨道变形监测、农作物长势和估算产量、交通事故数字化记录等。有“冰丝带”之称和“最快的冰、最平的冰”的国家速滑馆,即采用了精度优于2mm的高精度三维激光扫描技术辅助冰场地下制冰排管的精确安装。
未来的激光雷达
未来的激光雷达可从激光雷达硬件系统、数据处理和应用方面来分析。
当前商业化激光雷达系统研制已进入爆发期,各种性能的激光雷达呈百花齐放的态势。总体来说,激光雷达系统趋向于高性能、低成本、轻小型化,具有更高的测距精度、更大的扫描范围、更快的扫描频率、更窄的光束发散角和更远的测量距离。自带激光扫描头的手机等使激光雷达进入消费级市场。同时,高光谱/多光谱激光雷达的出现弥补了单波长(近红外的1064nm、1550nm等)或者双波长(1064nm和532nm)激光雷达系统获取信息单一、缺乏光谱信息等不足,成为未来发展方向。高光谱/多光谱激光雷达可获取不同波段下的激光雷达回波,不仅具备空间三维信息获取能力,并且同时具备地物光谱信息获取能力,逐渐成为植被结构和生化参数反演的最佳手段。另外,随着量子信息技术的发展,量子激光雷达具有更强的抗干扰性、更高的灵敏度和距离与角度分辨率。
在数据处理方面,多平台(星机地)、多模态(点云、波形、光子)激光雷达系统为多行业应用提供了多源、海量三维数据,这些数据各具特点、优势互补,实际应用中多源数据精准配准和定量应用一直是难点,亟待发展先进的人工智能、深度学习等方法,为激光雷达大数据的处理和应用提供支持。
审核编辑:刘清
-
一种基于基础模型对齐的自监督三维空间理解方法2025-03-18 1156
-
泰来三维|三维扫描服务_三维扫描助力园区改造公园2024-05-07 1226
-
泰来三维|古墓三维扫描数字化还原遗址墓室时空关系2023-05-29 1664
-
[10.2.1]--4.6.1三维空间中的平面方程_clip001jf_90840116 2022-12-15
-
三维空间中每一平面有四个点,能根据这四个点画出一个圆来吗 ?2022-05-24 4324
-
基于麦克风阵列模拟人耳进行三维空间的声源定位2021-08-06 2549
-
立体仓库三维空间路径优化方案的介绍2021-07-12 1489
-
适用于户外环境的三维空间椭圆信道模型2021-05-11 1059
-
基于多传感器数据融合处理实现与城市三维空间和时间配准2020-07-14 5255
-
请问ADXL345配合陀螺仪能精确测量短时三维空间运动路径吗?2019-02-26 3129
-
高精度三维空间定位之单目空间定位技术解析2018-10-16 12214
-
基于伺服控制的三维空间磁场与磁力测试系统2017-09-08 1184
-
labview 利用三维空间画了一个球,然后想在球面上画几个点2014-02-21 6660
-
基于交流伺服控制的三维空间磁场与磁力测试技术2009-07-05 544
全部0条评论

快来发表一下你的评论吧 !
