

KUKA机器人CAST_TO-CAST_FROM数据传输
机器人
554人已加入
描述
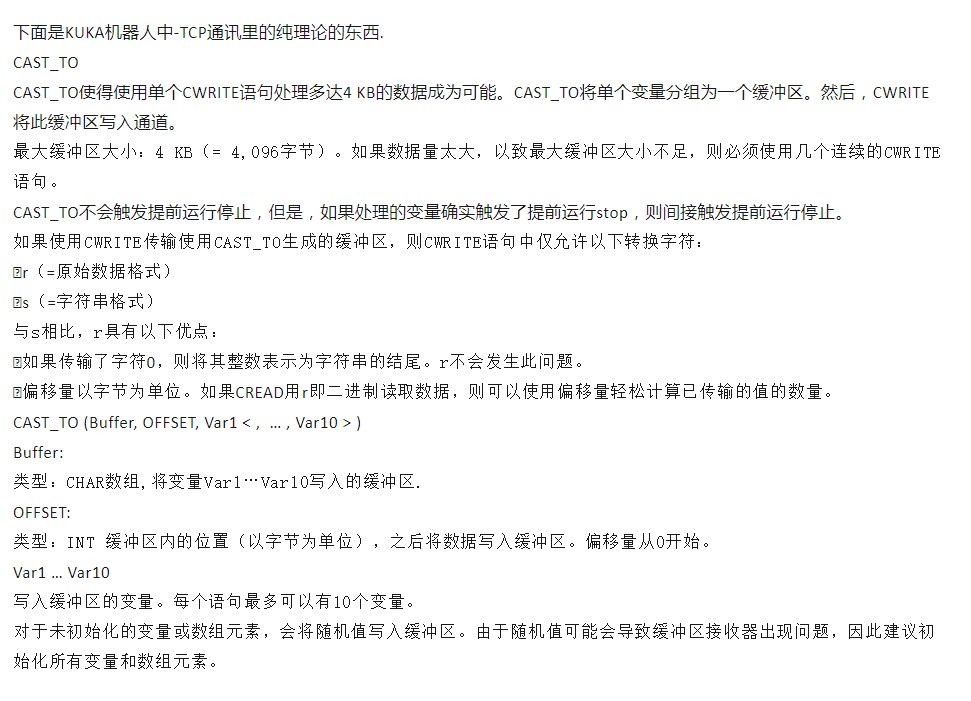
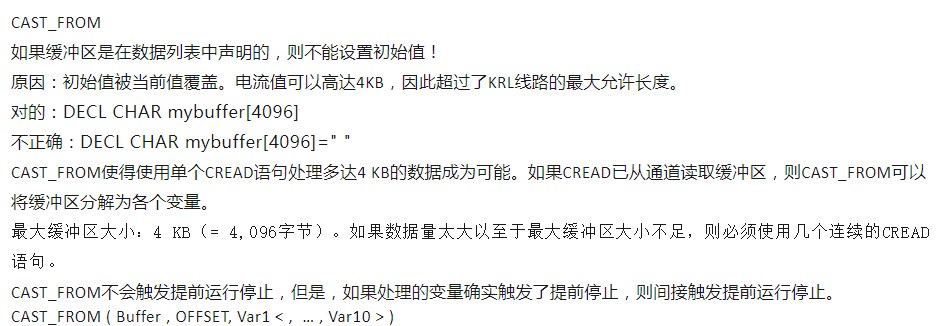
| Buffer | 类型:CHAR数组 其数据用于填充变量Var1…Var10的缓冲器 |
| OFFSET | 类型:INT 缓冲区内的位置(以字节为单位),在该位置之后,数据被用来将它们写入变量Var1…Var10。偏移量从0开始。 示例: OFFSET=0:缓冲器从第一个位置开始使用。 OFFSET=2:缓冲器从第三个位置开始使用。位置1和2被忽略。 |
| Var1 … Var10 | 使用缓冲区中的数据写入的变量。每条语句最多可以有10个变量。每个变量从缓冲区接收的字节数由其数据类型决定。 INT变量1、BOOL变量2、REAL变量3 Var1接收4个字节;Var2接收1个字节;Var3接收4个字节。 |
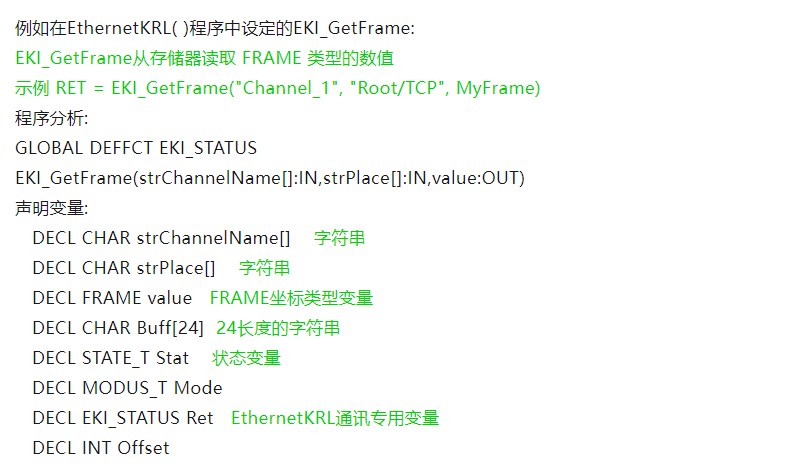
CAST 语句中允许的数据类型
| INT | 4 bytes |
| REAL | 4 bytes |
| BOOL | 1 byte |
| CHAR | 1 byte |
| ENUM | 4 bytes |
| SIGNAL | 1 byte |
| FRAME | 6*REAL |
| POS | 6*REAL + 2*INT |
| AXIS | 6*REAL |
| E3POS | 6*REAL + 2*INT + 3*REAL |
| E3AXIS | 6*REAL + 3*REAL |
| E6POS | 6*REAL + 2*INT * 6*REAL |
| E6AXIS | 6*REAL + 6*REAL |
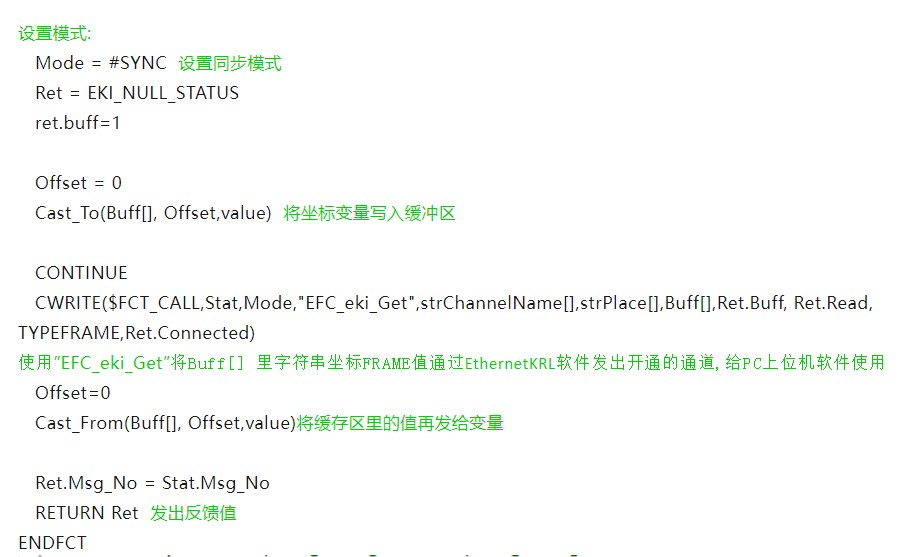
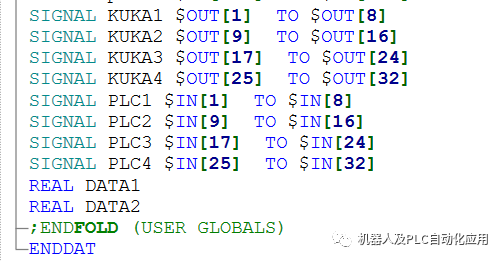
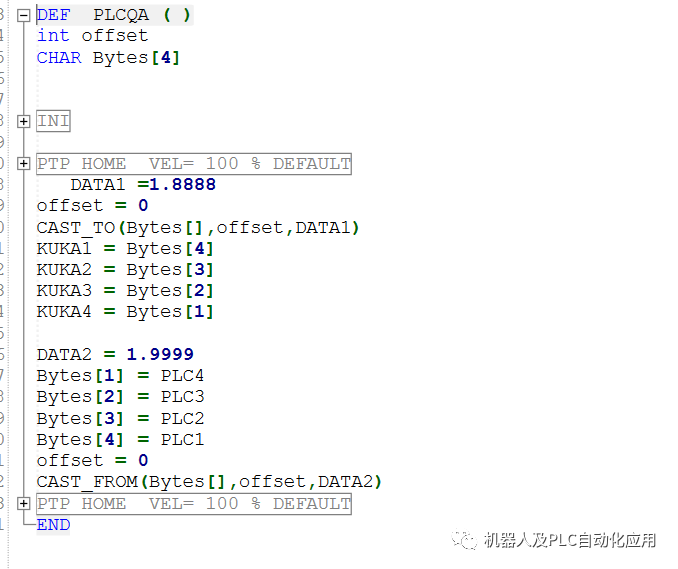
发送标准编码的real数据,PLC端可直接使用ID数据进行real数据的判断。(注:使用CAST_TO函数后,Bytes[1]为对应二进制的低位,Bytes[4]为高位。上面的KUKA1对应的bytes4是为了将PLC能直接读数据而不用通过SWAP指令进行转换)接收到的数据存于DATA2中。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAST和Achronix使用无损压缩IP支持从数据中心到边缘的数据处理2018-05-03 7792
-
使用banana PI 作为管道机器人控制及数据传输2014-08-09 6096
-
KUKA重型机器人2015-02-03 8320
-
求KUKA机器人控制柜三维模型2016-04-18 6462
-
KUKA机器人问题解答2019-07-15 2625
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8019
-
工业机器人组成结构相关资料分享2021-07-05 2741
-
库卡机器人MGV电源模块维修2021-09-08 1880
-
KUKA机器人伺服驱动模块维修2021-09-17 1884
-
CAST工艺自控系统的开发2009-07-16 1293
-
数据传输速率是什么意思2010-03-18 5327
-
CAST推出32位RISC处理器BA222011-07-27 4359
-
C++的cast最完整最详细的解释资料说明2019-01-29 1405
-
KUKA机器人CAST_TO-CAST_FROM简析2023-05-09 1735
-
KUKA机器人中-TCP通讯数据传输2023-06-16 5283
全部0条评论

快来发表一下你的评论吧 !
