

高超声速飞行器输入受限反步控制研究探讨
军用/航空电子
描述
王鹏飞,蒋坤,张峰(陆军炮兵防空兵学院,合肥 230031)
摘 要
高超声速飞行器因其重要的战略地位已经成为各国争夺空天权所关注的焦点。控制系统设计是保证高超声速飞行器实用化的关键技术。针对吸气式高超声速飞行器,设计一种反步控制器。为增强反步控制器的鲁棒性,引入径向基神经网络对高超声速飞行器纵向非仿射动力学模型中的不确定函数进行在线逼近。为了解决输入受限带来的控制问题,构造一种新型辅助系统对跟踪误差和控制律进行补偿,实现在控制输入瞬时饱和情况下的稳定跟踪。最后,基于MATLAB仿真验证了控制策略的有效性。
1 引 言
随着人类对太空的探索日益增多,临近空间(距水平面20~100 km)因其特殊的空间位置受到人们越来越多的关注[1]。高超声速飞行器作为一种能够飞行在临近空间的新型飞行器,正成为各军事大国争相发展的目标。由于高超声速飞行器的动力学特性呈现出显著的非线性和非最小相位特点,因此给其控制系统的设计带来了巨大挑战。目前,以反步控制、滑模控制、智能控制等为代表的非线性控制已逐渐成为高超声速飞行器控制系统设计的主流方法。反步控制形成于20世纪90年代,它体现了一种层叠设计思想,即通过递归构造闭环系统的Lyapunov函数,从而保证闭环系统轨迹的有界性和收敛性。反步控制的缺点是存在虚拟控制量导数反复求导导致的“微分膨胀”问题[2-5]。
孟尧等[4]采用动态面技术避免了对虚拟控制变量的重复求导。文献[5]通过滑模微分器获取虚拟控制量的导数,从而避免了“微分膨胀”问题。滑模控制也称为变结构控制,它能够使得系统按照预定的“滑动模态”的状态轨迹运动。由于“滑动模态”与对象参数无关,因此滑模控制具有响应速度快、鲁棒性强等特点,但是其缺点是抖振现象较为严重,容易激发飞行器的弹性振动[6-9]。黄书童等[8]利用双幂次趋近律代替原有符号函数,设计了一种双幂次滑模反步控制策略,降低了抖振的影响。
文成馀等[9] 将控制律内的符号函数连续化,设计了一种快速平滑的二阶滑模控制系统。智能控制常用来处理复杂不确定性系统,主要包括神经网络控制和模糊控制等[10-12]。相较传统控制方法,智能控制不依赖于精确模型,因而具有更强的自适应和鲁棒性。
文献[13]将高超声速飞行器的轨迹跟踪转化为对角速率误差的最优控制,利用神经网络逼近最优控制中的代价函数,从而获得最优的反馈控制律。张迎雪等[14]针对高超声速飞行器的快/慢回路分别设计了分数阶比例、积分和微分(Proportional Integral Derivative,PID)控制器,利用模糊控制的任意逼近性在线调节PID参数,显著提升了控制系统的鲁棒性。高超声速飞行器独特的动力学特性要求其本身的执行机构必须受限,即输入受限问题。吴立刚等[15]讨论了受限条件下滑模面的最大收敛域问题。
文献[16]针对输入受限时控制系统的稳定性无法保证的问题,引入辅助系统对跟踪误差进行补偿,保证了在出现执行机构饱和时控制系统对参考轨迹的稳定跟踪。综合前面的研究成果,本文针对高超声速飞行器输入受限问题,提出一种反步神经网络控制策略。
首先选取吸气式高超声速飞行器的纵向动力学模型作为研究对象,基于反步控制设计框架,引入神经网络,设计反步神经网络控制器。为解决输入受限问题,设计一种辅助系统对跟踪误差和理想控制律进行补偿,保证控制输出对参考轨迹的稳定跟踪。最后,基于MATLAB仿真验证了所设计控制策略的可行性与有效性。
2 模型描述
2.1 动力学建模
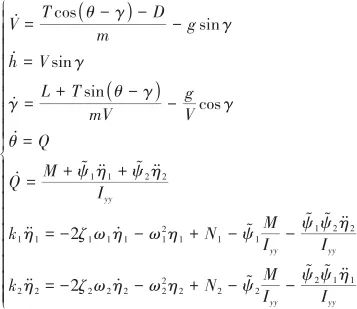
本文选取Parker针对吸气式高超声速飞行器提出的纵向平面运动模型[17]:
 (1)
(1)
式中,V、h、γ、θ和Q这5个刚体状态量分别代表高超声速飞行器的速度、高度、航迹角、俯仰角和俯仰角速率; 、
、 、
、 以及
以及 分别代表飞行器的一、二阶弹性模态及其导数;T、D、L和M分别为气动力(推力、阻力及升力)和气动力矩;
分别代表飞行器的一、二阶弹性模态及其导数;T、D、L和M分别为气动力(推力、阻力及升力)和气动力矩; 和
和 (i=1,2)分别为第i阶弹性状态量的阻尼系数和自然频率;Ni(i=1,2)为第i阶广义弹性力;
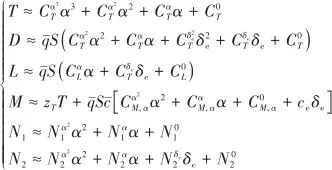
(i=1,2)分别为第i阶弹性状态量的阻尼系数和自然频率;Ni(i=1,2)为第i阶广义弹性力; (i=1,2)为第i阶弹性状态量的耦合系数;k1和k2为常数;Iyy为y轴的转动惯量;m为质量。为方便接下来的控制器设计,将气动力和力矩分别改写为仿射形式[17]:
(i=1,2)为第i阶弹性状态量的耦合系数;k1和k2为常数;Iyy为y轴的转动惯量;m为质量。为方便接下来的控制器设计,将气动力和力矩分别改写为仿射形式[17]:
 (2)
(2)
式中, 为动压,
为动压, ;S和
;S和 分别为参考面积和平均气动弦长;
分别为参考面积和平均气动弦长; 为推力力臂;
为推力力臂; 为攻角;
为攻角; 为升降舵偏角;其余气动参数分别为
为升降舵偏角;其余气动参数分别为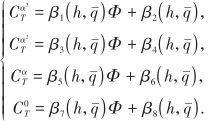
式中, 为燃料当量比;
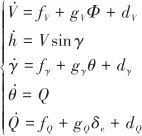
为燃料当量比; 为第i阶推力拟合参数。综合式(1)和式(2)可得
为第i阶推力拟合参数。综合式(1)和式(2)可得
 (3)
(3)
式中,


式中, 、
、 和
和 均为包含弹性模态的不确定项。至此,完成了从式(1)的原理模型向面向控制模型式(3)的转化。控制输入分别为燃料当量比以及升降舵偏角
均为包含弹性模态的不确定项。至此,完成了从式(1)的原理模型向面向控制模型式(3)的转化。控制输入分别为燃料当量比以及升降舵偏角 ,控制输出为V、h。
,控制输出为V、h。
2.2 神经网络
为了避免模型中的不确定项对控制系统产生影响,这里引入径向基神经网络对其进行逼近:
 (4)
(4)
式中, 和
和 分别为神经网络的输入和输出;
分别为神经网络的输入和输出; 为权值向量,
为权值向量, ;
; 为径向基函数,
为径向基函数, 。典型的径向基函数的形式为
。典型的径向基函数的形式为
 (5)
(5)
式中, 和
和  分别为函数中心的向量大小以及宽度。假设
分别为函数中心的向量大小以及宽度。假设 为一连续函数,存在一个理想的权值向量
为一连续函数,存在一个理想的权值向量 使得下述等式成立[18]:
使得下述等式成立[18]:
 (6)
(6)
式中, 为估计误差;
为估计误差; 为估计误差的上界。
为估计误差的上界。
3 控制器设计
为便于控制器设计,将式(3)拆分为速度和高度两个子系统分别进行控制器设计。当然,这种设计思路只是在形式上加以区分,并不影响两者间的耦合关系[19]。
3.1 速度控制器及稳定性证明
首先,将速度方程改写为
 (7)
(7)
式中,FV为包含气动力和力矩的函数,其表达式为
定义速度的跟踪误差:
 (8)
(8)
为解决受限问题,引入一种新型辅助系统形式:
 (9)
(9)
对式(7)修正可得
 (10)
(10)
对式(10)求导得
 (11)
(11)
为降低参数摄动、建模误差对控制系统的影响,因此引入神经网络对 进行估计。其估计可表示为
进行估计。其估计可表示为
 (12)
(12)
式中, 为权值向量
为权值向量 的估计值。定义权值参数向量的最优值
的估计值。定义权值参数向量的最优值 为
为
 (13)
(13)
则根据式(6)可将表示为
 (14)
(14)
式中, 为逼近误差,
为逼近误差, 为其上界。定义权值向量的估计误差为
为其上界。定义权值向量的估计误差为
 (15)
(15)
则有
 (16)
(16)
定义的自适应律为
 (17)
(17)
式中,λV为正设计参数。构造速度子系统的可执行控制律为
 (18)
(18)
式中, 、
、 均为正的设计参数。将式(18)代入式(11)可得
均为正的设计参数。将式(18)代入式(11)可得
 (19)
(19)
选取速度子系统的Lyapunov函数为
 (20)
(20)
对式(20)求导得
 (21)
(21)
由于
 (22)
(22)
因此,式(21)可改写为
 (23)
(23)
定义如下紧集:
 (24)
(24)
若 不属于集合
不属于集合 ,且
,且 ,则有
,则有 。
。
3.2 高度控制器及稳定性证明
为简化高度控制系统设计,根据文献[20]提出的方法构造高度h的控制律为
 (25)
(25)
式中, 和
和 均为待设计的正参数。令
均为待设计的正参数。令 ,即可实现h对
,即可实现h对 的跟踪[17]。在不考虑速度和高度方程的前提下,将式(3)改写为
的跟踪[17]。在不考虑速度和高度方程的前提下,将式(3)改写为
 (26)
(26)
式中,

与速度子系统类似,引入神经网络对  和
和 估计:
估计:
 (27)
(27)
分别定义权值向量的最优值 、
、 ,将 和表示为
,将 和表示为
 (28)
(28)
式中, 和
和  均为逼近误差。定义
均为逼近误差。定义 和
和 分别为和 的上界。定义权值向量的估计误差为
分别为和 的上界。定义权值向量的估计误差为
 (29)
(29)
则有
 (30)
(30)
定义跟踪误差并求导得
 (31)
(31)
同样,为解决受限问题,这里引入辅助系统形式对俯仰角速率进行补偿:
 (32)
(32)
由于本文处理的是瞬时饱和,因此假定 有界,其上界为
有界,其上界为 。因此,式(32)可以改写为
。因此,式(32)可以改写为
 (33)
(33)
分别选取航迹角γ、航迹角θ和俯仰角速率Q的控制律为
 (34)
(34)
式中, 、
、 、
、 、
、 、
、 和
和 均为控制器参数。为避免出现反步系统中的“微分膨胀”问题,引入低通滤波器对中间控制量的导数求解:
均为控制器参数。为避免出现反步系统中的“微分膨胀”问题,引入低通滤波器对中间控制量的导数求解:
 (35)
(35)
 (36)
(36)
式中, 和
和 均为待设计的正参数。定义状态量
均为待设计的正参数。定义状态量 和
和 的估计误差为
的估计误差为
 (37)
(37)
对式(37)求导得
 (38)
(38)
根据文献[17]的结果可知:
 (39)
(39)
定义 和
和 的自适应估计律为
的自适应估计律为
 (40)
(40)
式中, 、
、 为正设计参数。选取高度子系统的Lyapunov函数为
为正设计参数。选取高度子系统的Lyapunov函数为
Wh=Wγ+Wθ+WQ(41)
式中,


对式(41)求导得
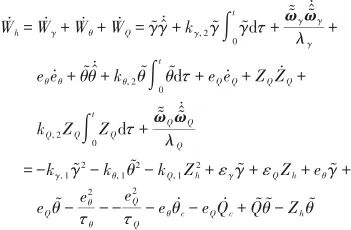 (42)
(42)
由于 ,
,
 ,
,



则式(42)可改写为
 (43)
(43)
定义如下紧集:
 (44)
(44)
若上述误差均位于式(44)中的紧集之外,同时控制参数符合下述关系式: ,
, ,
,
 ,
, ,
,
则有 ,此时所有误差信号均有界。
,此时所有误差信号均有界。
4 仿真分析
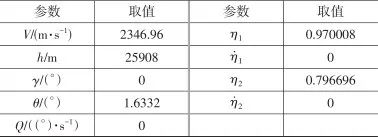
针对式(3)的模型进行闭环仿真,飞行器的初始取值如表1所示。
▼ 表1 初始状态取值
▼ Tab. 1 Initial trim conditions
控制器参数为: ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ;一阶低通滤波器的设计参数为
;一阶低通滤波器的设计参数为 ;辅助系统参数为
;辅助系统参数为 ,
, ;弹性变量取值:
;弹性变量取值: ,
, ,
, ,
, ,
, ;神经网络输入:
;神经网络输入: ,
, ,
, ;输入区间定义为
;输入区间定义为 ,
, ,
, ,
, ;径向基函数的参数
;径向基函数的参数 ,
, ,
, ,
, 。为了验证控制器效果,将控制输入的约束范围设定为
。为了验证控制器效果,将控制输入的约束范围设定为 ,
, 。为了检验系统的鲁棒性,在
。为了检验系统的鲁棒性,在 时分别向动力学模型中加入下列扰动:
时分别向动力学模型中加入下列扰动: ,
,  。定义速度阶跃
。定义速度阶跃 ,高度阶跃
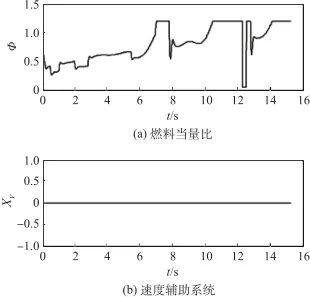
,高度阶跃 。控制系统的输入的仿真结果如图 1~图4所示。图1为对控制律和跟踪误差进行补偿情况下,燃料当量比及其辅助系统曲线。由图1可以看出,大约在30~50 s的仿真时间内出现了饱和,此时辅助系统能够迅速响应进行补偿,使得控制输入尽快退出饱和状态。作为对比,图2所示为无补偿的情况,可以看出出现了持续的饱和,控制律失效直至仿真终止。图3所示为有补偿情况下升降舵偏角及其辅助系统的输出曲线,可以看出在仿真初期虽然出现了短暂的受限,但由于有辅助系统的存在,其很快恢复到正常状态。图4所示为无补偿的状态,此时由于出现了持续饱和,控制律失效导致控制失败。
。控制系统的输入的仿真结果如图 1~图4所示。图1为对控制律和跟踪误差进行补偿情况下,燃料当量比及其辅助系统曲线。由图1可以看出,大约在30~50 s的仿真时间内出现了饱和,此时辅助系统能够迅速响应进行补偿,使得控制输入尽快退出饱和状态。作为对比,图2所示为无补偿的情况,可以看出出现了持续的饱和,控制律失效直至仿真终止。图3所示为有补偿情况下升降舵偏角及其辅助系统的输出曲线,可以看出在仿真初期虽然出现了短暂的受限,但由于有辅助系统的存在,其很快恢复到正常状态。图4所示为无补偿的状态,此时由于出现了持续饱和,控制律失效导致控制失败。
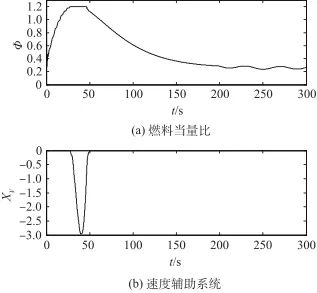
▲ 图1 燃料当量比及其辅助系统曲线(有补偿)
▲ Fig.1 Curves of fuel equivalent ratio and auxiliary system(with compensation)
▲ 图2 燃料当量比及其辅助系统曲线(无补偿)
▲ Fig.2 Curves of fuel equivalent ratio and auxiliary system(without compensation)
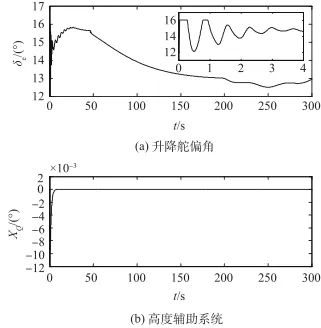
▲ 图3 升降舵偏角及其辅助系统曲线(有补偿)
▲ Fig.3 Curves of elevator deflection angle and auxiliary system(with compensation)
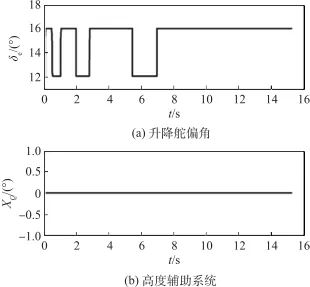
▲ 图4 升降舵偏角及其辅助系统曲线(无补偿)
▲ Fig.4 Curves of elevator deflection angle and auxiliary system(without compensation)
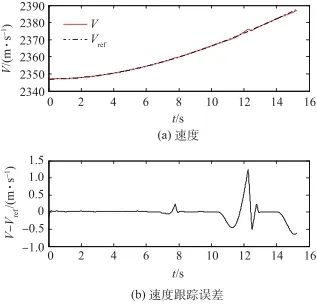
控制系统的速度和高度输出及其各自的跟踪误差如图5~图8所示。与前面类似,分别将有补偿和无补偿的情况做一对比。从仿真结果可以看出,有补偿时,速度和高度都能稳定跟踪各自的参考轨迹,调节时间很短。如果去除补偿策略,速度和高度则无法跟踪参考轨迹,控制失败。
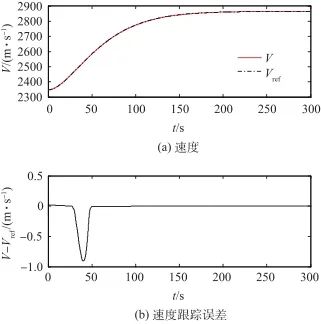
▲ 图5 速度及其跟踪误差曲线(有补偿)
▲ Fig.5 Curves of velocity and tracking error(with compensation)
▲ 图6 速度及其跟踪误差曲线(无补偿)
▲ Fig.6 Curves of velocity and tracking error(without compensation)
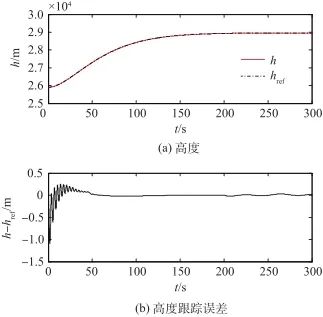
▲ 图7 高度及其跟踪误差曲线(有补偿)
▲ Fig.7 Curves of altitude and tracking error(with compensation)
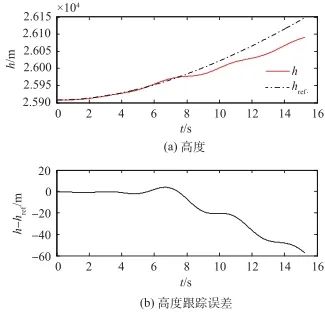
▲ 图8 高度及其跟踪误差曲线(无补偿)
▲ Fig.8 Curves of altitude and tracking error(without compensation)
5 结 论
(1)本文针对输入受限条件下的高超声速飞行器精确稳定跟踪控制策略开展研究。通过构造一种新型辅助系统,在控制输入受限时能够继续执行控制律。仿真结果表明,当控制输入的幅值出现持续饱和时,所设计的辅助系统能够及时对跟踪误差与控制律进行补偿,使得控制输入退出饱和状态,恢复对参考轨迹的持续跟踪,确保飞行器的飞行姿态稳定。
(2)不同于文献[16]中基于精确数学模型构造控制器,即将模型不确定性归为干扰项,利用干扰观测器对不确定项进行逼近的思路。本文将模型中包含气动力在内的各种作用力及不确定项归结为总的非线性未知函数,引入神经网络对其估计,进一步弱化了控制器对模型的依赖。从仿真结果可以看出,速度与高度的跟踪误差超调量及调节时间均非常小,获得了较为满意的控制性能。
(3)本文虽然对输入受限问题的研究主要集中于对幅值饱和的补偿,而对控制量带宽与速率的受限问题未作考虑。因此,下一步对幅值、带宽和速率同时受限问题开展相关研究是将输入受限问题推广到实际应用中必须开展的工作。
编辑:黄飞
-
SINS/GPS/CNS组合导航在高超声速巡航飞行器上的应用2009-06-22 843
-
高超声速飞行器的轨迹设计与仿真研究2013-05-06 850
-
考虑气动弹性的高超声速飞行器姿态稳定控制_黄显林2017-01-08 652
-
基于S7_300PLC的高超声速高温风洞控制系统设计_蒲旭阳2017-02-07 914
-
高超声速强机动目标改进IMM_CKF跟踪算法_戴邵武2017-03-19 814
-
基于干扰观测器的双幂次滑模式控制策略2017-11-01 933
-
美国陆军计划在2023年进行该高超声速导弹的飞行试验2020-03-17 1896
-
如何使用一种弹性自适应控制方法实现超声速飞行器的控制2020-07-10 1375
-
如何建立有效侦察,应对未来高超声速武器的威胁2020-11-08 3211
-
高超声速飞行器推进系统应用介绍2023-02-06 3254
-
浅析美高超声速武器防御体系2023-05-19 1891
-
高超声速飞行总体概念2023-09-04 3712
-
高超声速动力能热管理技术综述2024-04-04 4206
-
高超声速动力能热管理设计要点 | 耐高温绝缘陶瓷涂层材料2025-02-22 1223
-
涡轮机驱动的冷电联供系统在高超声速飞行器中的应用:朗肯循环与布雷顿循环的对比分析2026-06-11 45
全部0条评论

快来发表一下你的评论吧 !
