

永磁同步电机磁场定向控制电流环PI调节器的参数整定
描述
前言
本章节采用工程设计的方法,推导出电流环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的电流内环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行Bode图分析,最后通过一个设计实例进行仿真验证。
一、调节器的工程设计方法
要实现调节器的工程设计方法,首先要简化问题,突出设计的主要矛盾。 简化的基本思路就是把调节器的设计过程分成两步:
1、选择调节器的结构,以确保系统稳定,同时满足所需要的稳态精度
2、再选择调节器的参数,以满足系统动态性能指标的要求
选择调节器的结构,使系统能满足所需要的稳态精度,这是设计过程中的第一步。 由于III型及III型以上的系统很难稳定,因此常把I型系统和II型系统作为系统设计的目标。
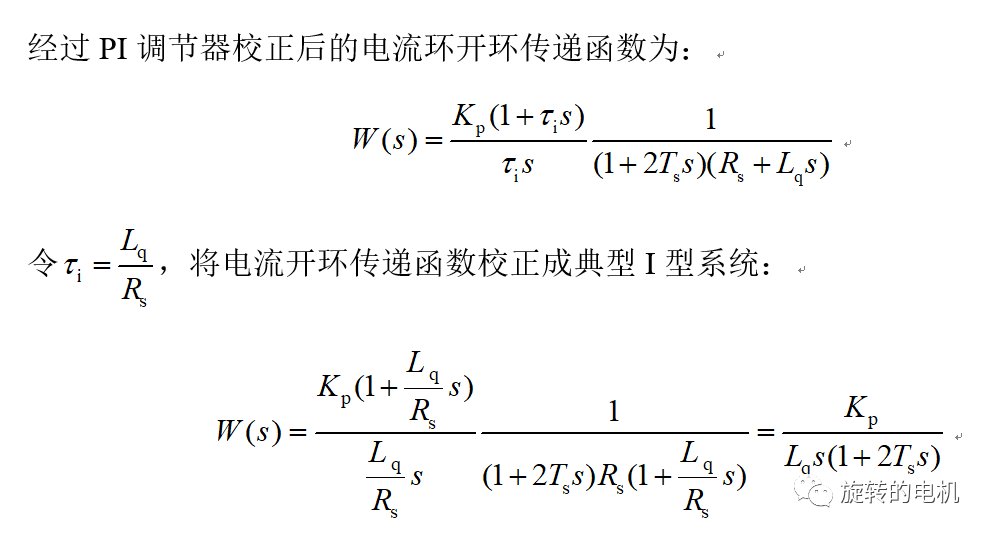
二、电流环PI调节器的参数整定
工程设计方法的原则是:先设计内环后设计外环,因此对于永磁同步电机磁场定向控制系统先设计电流内环PI调节器,将电流环校正为 典型I型系统 。
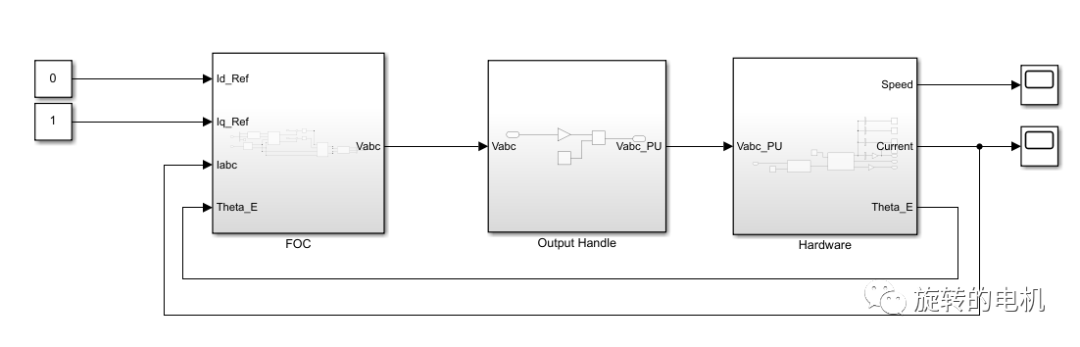
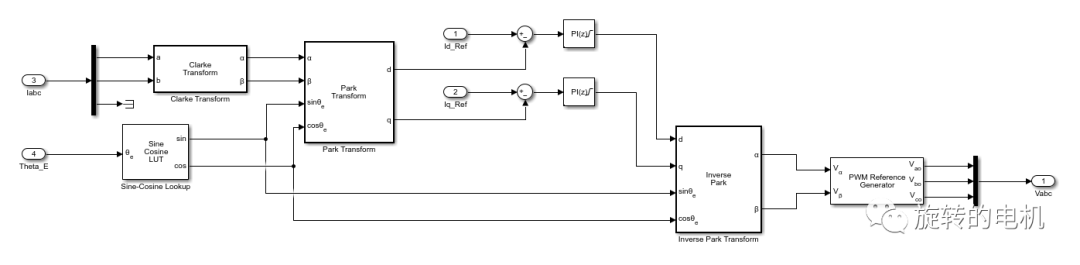
2.1.电流环的结构框图
对表贴式SPM永磁同步电机,多采用Id=0来进行控制,使定子电流全部用来产生电磁转矩。 由于dq轴电流内环具有对称性和相似的系统特性,所以d轴和q轴的电流调节器参数整定过程类似,本章节以q轴电流调节器参数整定为例进行设计。
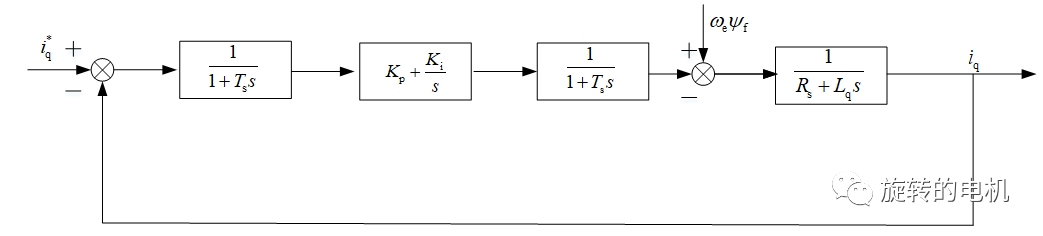
上图为控制系统电流环结构框图,q轴电流给定值iq*与q轴电流反馈值iq的误差为电流环的输入,该误差经过PI调节器输出q轴电压控制信号Uq,通过Uq控制电磁转矩。
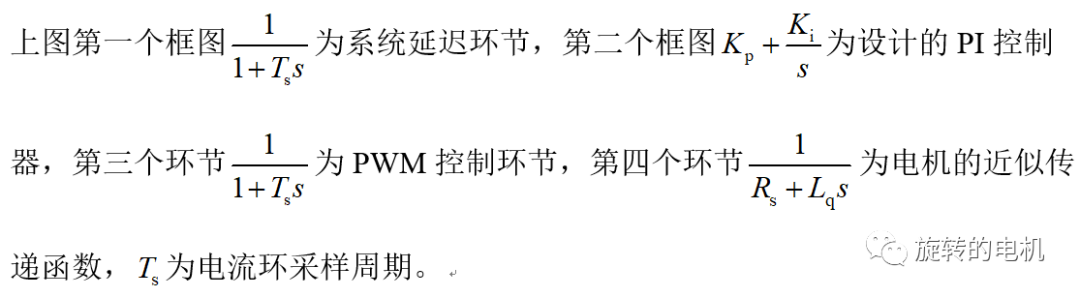
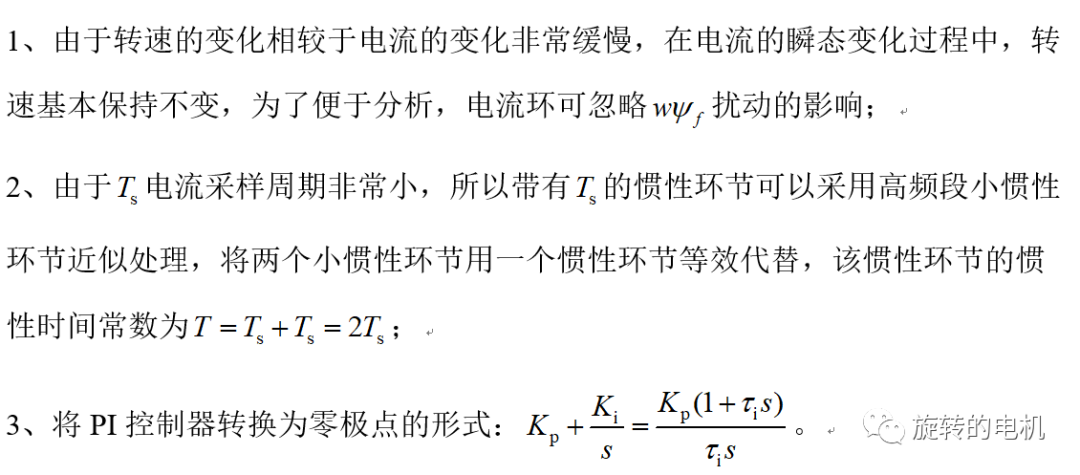
通过下述处理,进一步简化电流环的结构框图
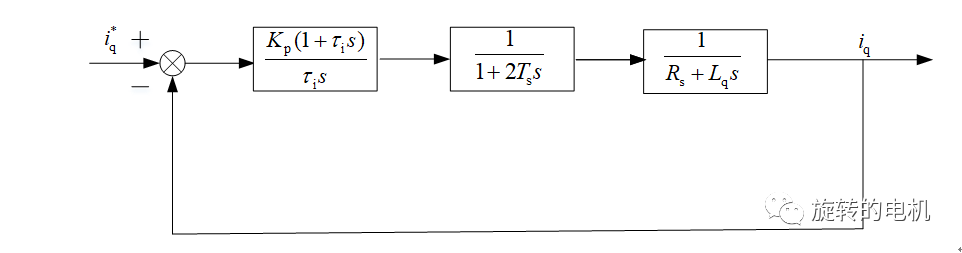
电流环的结构框图简化为:
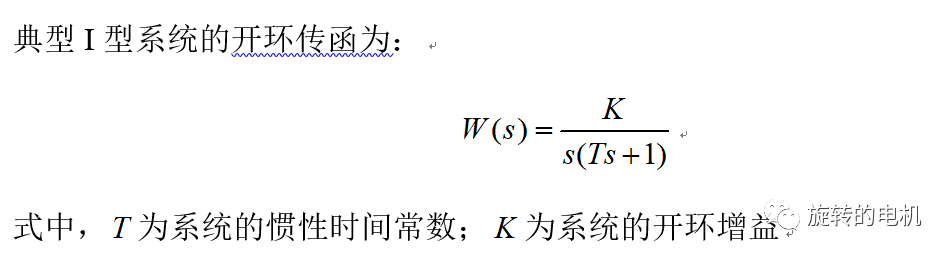
2.2.典型I型系统
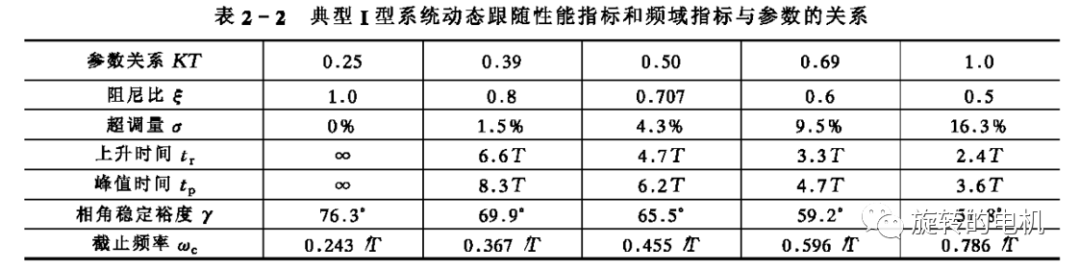
取T=0.001,K=100,绘制典型I型系统的Bode图:
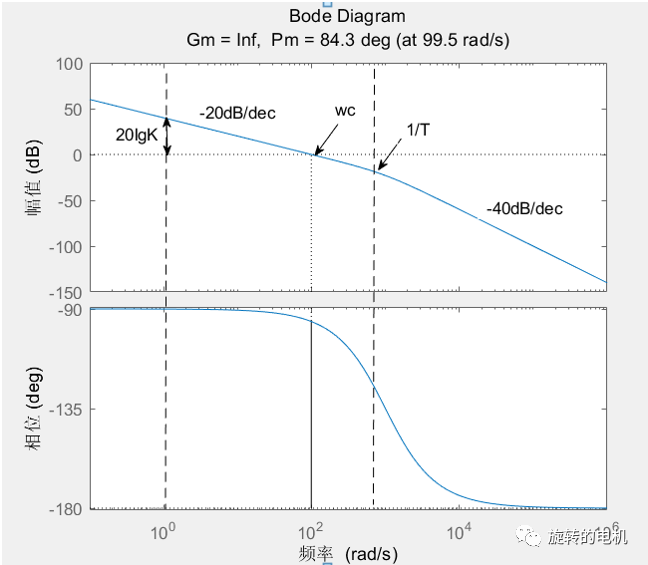
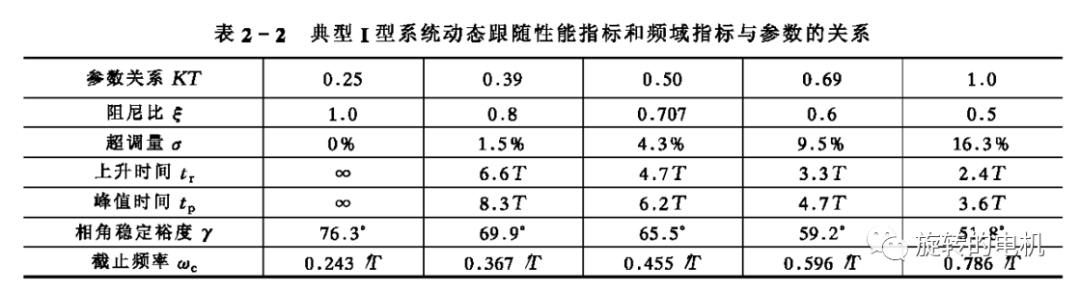
由上图,典型I型系统对数幅频特性的中频段以-20dB/dec斜率穿越0分贝线,只要参数选择能够保证足够的中频带宽度,系统就一定是稳定的。 典型I型系统中只包含开环增益K和时间常数T两个参数,时间常数T往往是控制对象本身固有的,系统唯一可变的只有开环增益K,设计时根据性能指标选择K的大小。
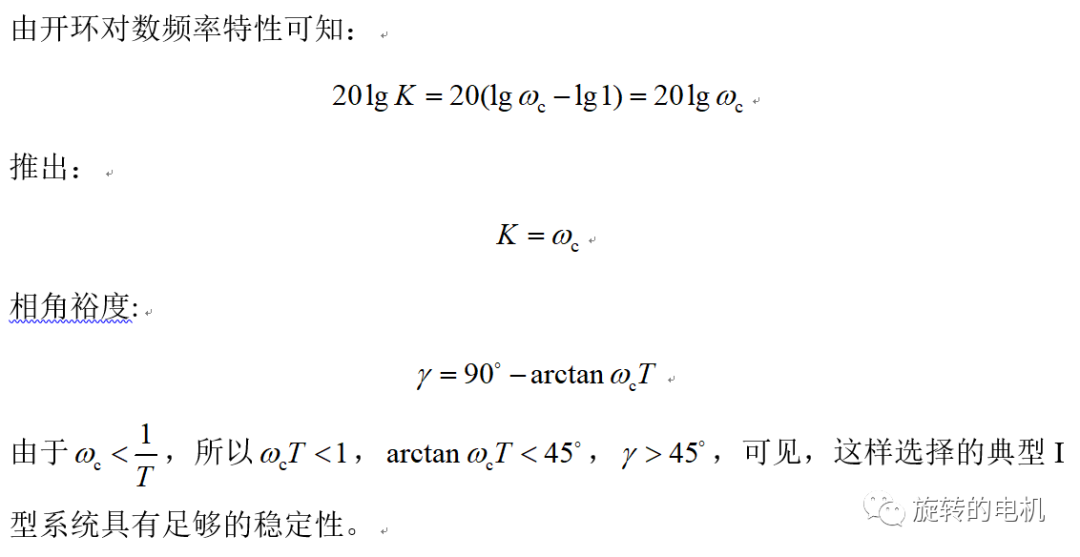
但是上式也表明,K值越大,截止频率wc也就越大,系统的响应越快,但相角裕度越来越小,系统稳定性越来越差,系统快速性和稳定性之间存在矛盾,具体选择参数K时二者应折中处理。 工程设计时,一般参照典型I型系统动态性能指标参数表进行K值的选取。

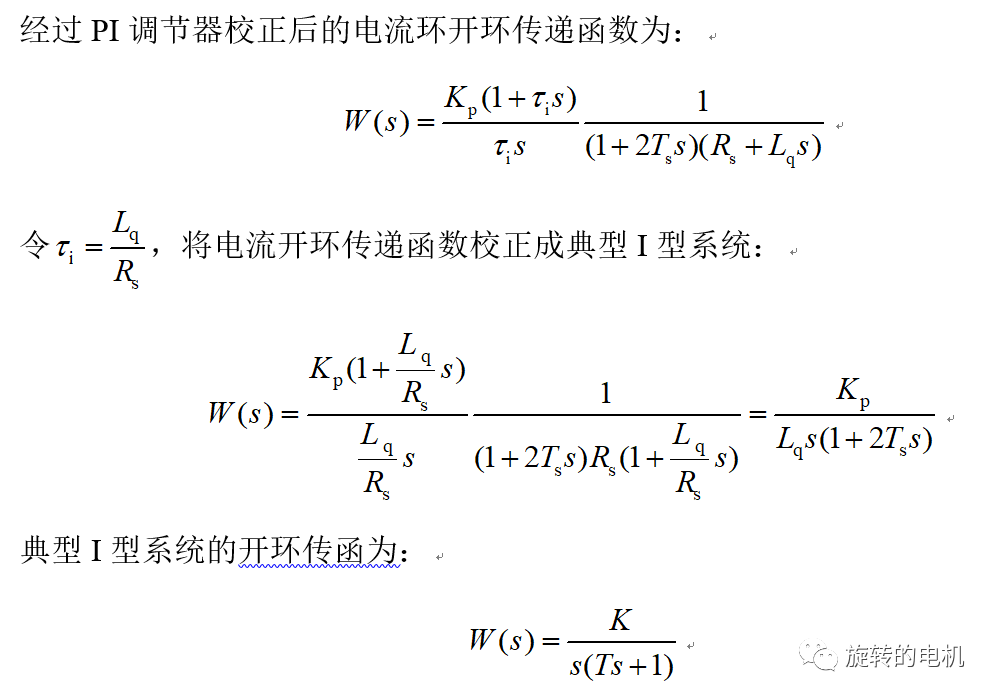
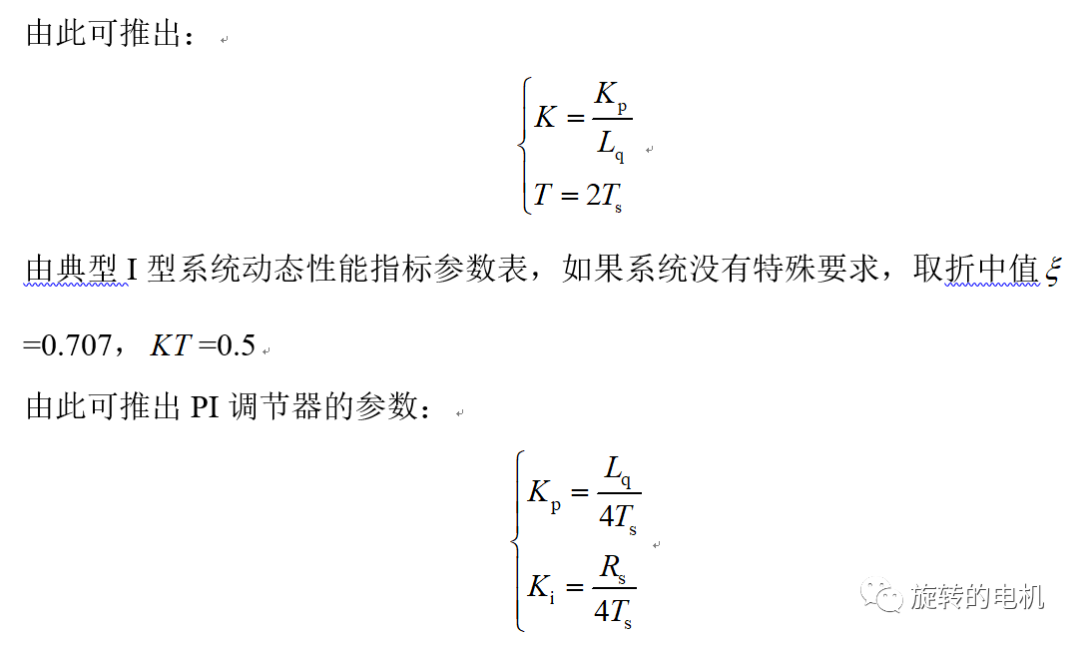
2.3.电流环PI参数整定计算公式
三、电流环PI调节器设计实例
3.1.永磁同步电机磁场定向的电流闭环控制
有关永磁同步电机磁场定向的电流闭环控制的详细分析,请阅读。
3.2.电流环PI参数计算
电机参数如下:
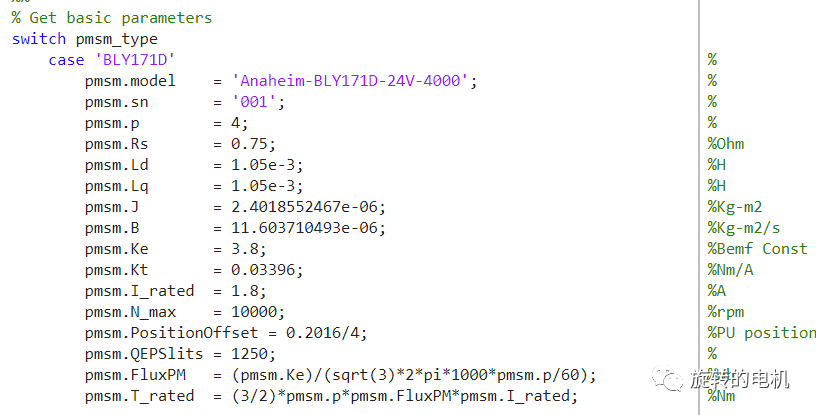
设定电流环采样频率为20KHz,即Ts=0.00005s,由电流环PI调节器参数计算公式得:
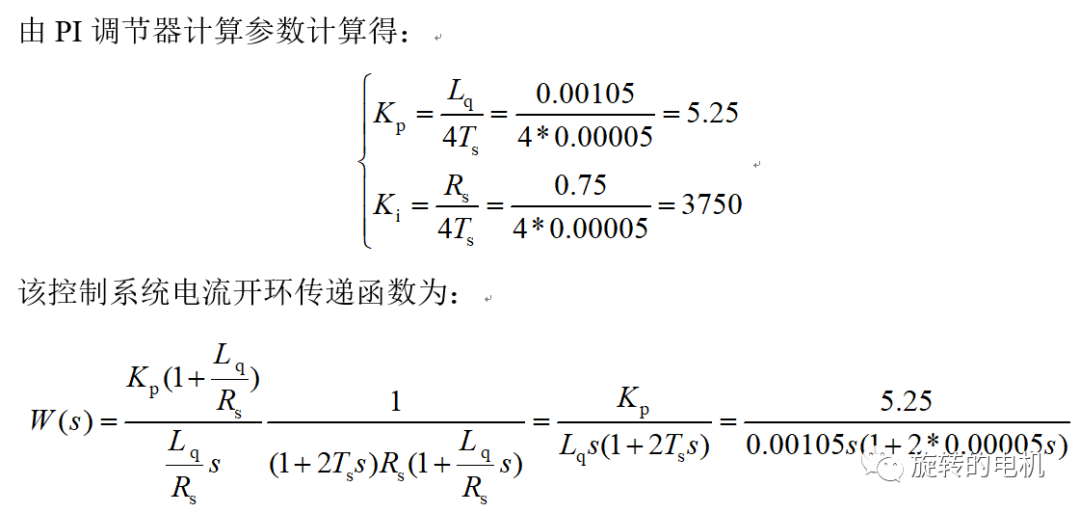
绘制该系统的Bode图如下:
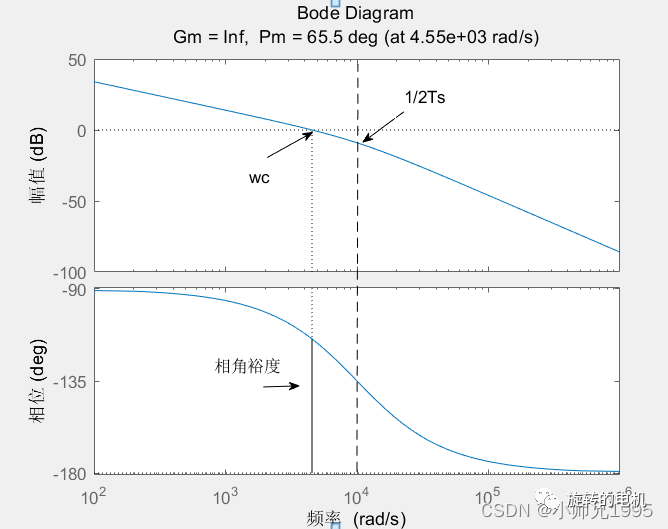
截止频率wc=4550,相角裕度65.5度,与下表KT=0.5所述的系统性能指标一致,表明PI控制器设计成功。
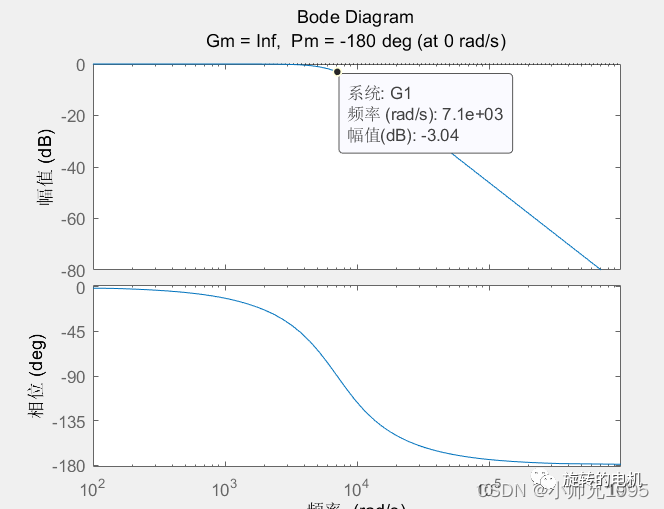
下图为该系统闭环传函的Bode图,从图中可已看出该系统的带宽频率约为7100rad/s。
3.3.仿真分析
将Kp=5.25,Ki=3750带入电流闭环仿真模型dq轴的PI调节器中进行仿真分析,结果如下:
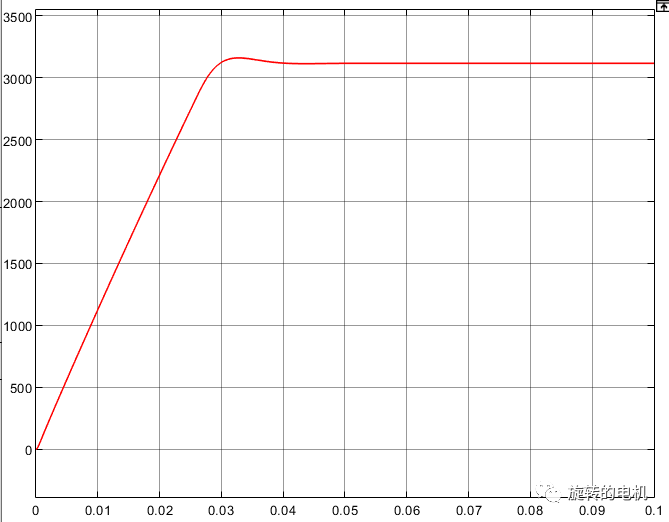
电机转速:
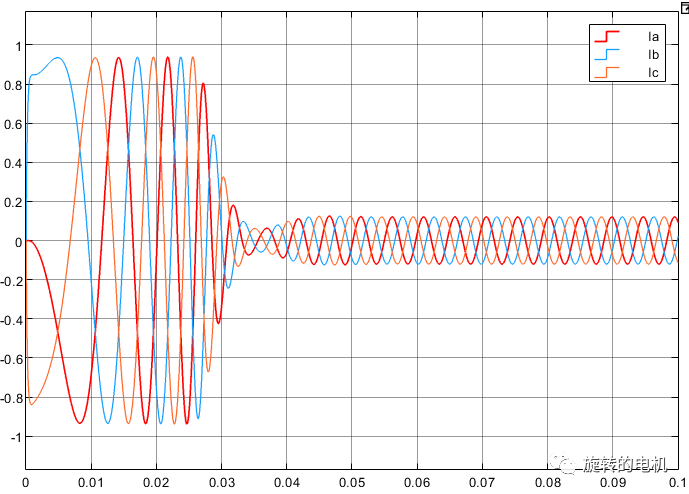
电机定子电流:
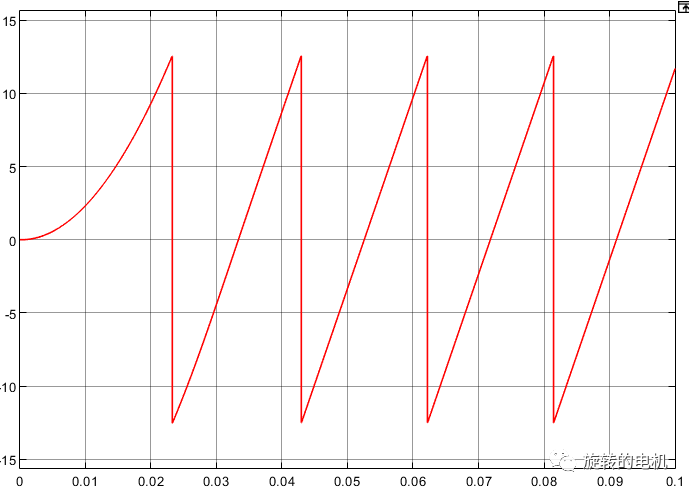
转子位置:
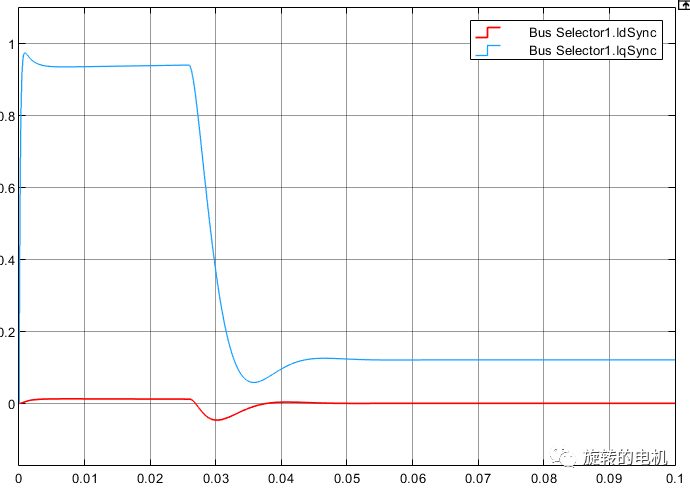
同步旋转坐标系下的定子电流Id、Iq:电机启动时以设定的最大电流1A进行启动,当转速达到稳态值时电流立即降了下来,实现了理想最优的启动过渡过程,反映出电流控制器参数设计成功,当然如果控制效果不好可以在工程设计参数的基础上进行参数微调。
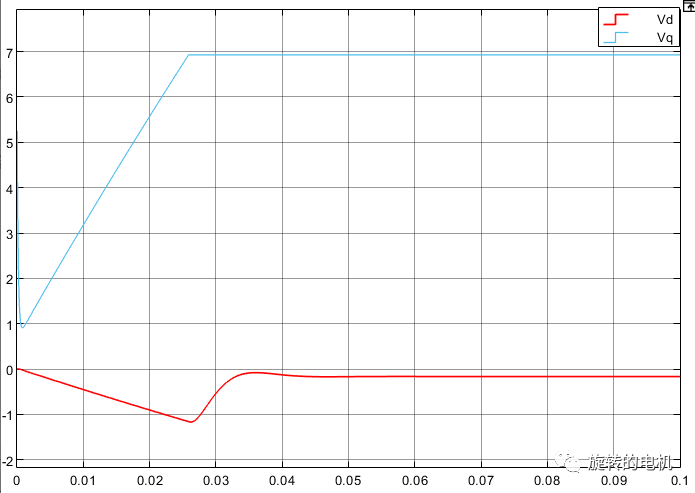
同步旋转坐标系下的定子电压:
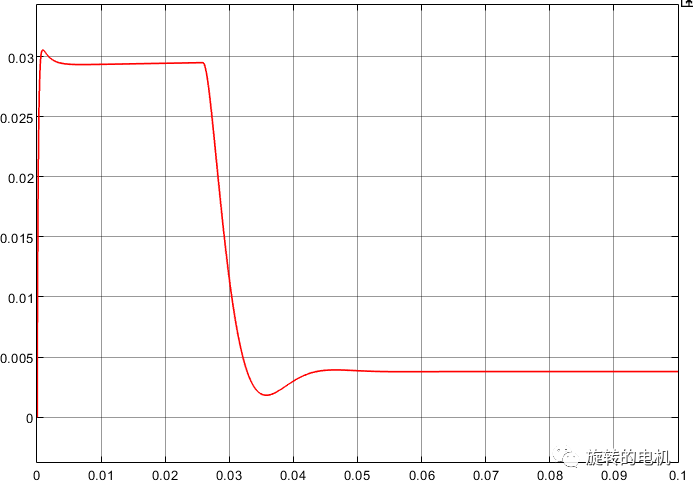
电磁转矩:
总结
本章节采用工程设计的方法,推导出了电流环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的电流内环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行了Bode图分析,最后通过一个设计实例进行了仿真验证,为后文的分析奠定基础。
-
永磁同步电机伺服系统PI参数整定2025-03-20 3143
-
永磁同步电机磁场定向控制转速环PI调节器的参数整定2023-05-23 5558
-
永磁同步电机(PMSM)磁场定向控制(FOC)电流环PI调节器参数整定2023-03-15 1462
-
永磁同步电机转速电流双闭环PI参数整定2023-03-14 1054
-
如何调试表贴式永磁同步电机FOC矢量控制中电流环PI控制器的参数?2021-09-23 2660
-
永磁同步电机矢量控制理论2021-08-27 3376
-
基于微控制器的永磁同步电机磁场定向控制2021-06-30 1718
-
永磁同步电机双闭环矢量控制PID调节器参数整定方法2020-12-25 2789
-
电机:永磁同步电机的磁场定向控制介绍2018-08-21 7962
-
永磁同步电机模糊PID参数自整定2016-04-06 820
-
永磁同步电机基于转子磁场定向的双闭环控制里面电流环的设计为何要让大时间常数与调节器的零点对消?2015-11-18 6859
全部0条评论

快来发表一下你的评论吧 !
