

基于手车式高压开关柜的手车智能控制技术研究
描述
李 煜1 李 卓2
1.北京京能清洁能源电力股份有限公司华南分公司 2.广州开发区粤电新能源有限公司
摘 要:
针对现有的各类高压开关柜手车无法很好地满足新能源电站“无人值班,少人值守”的要求,开发一种手车智能控制技术。传统的手车式高压开关柜,操作人员操作断路器手车和接地刀闸时,由于无电驱动机构,只能就地手动操作,若操作人员违反五防要求,导致误操作,则有可能危及人身、设备安全。某公司通过在传统的手车式高压开关柜断路器手车底盘和接地刀闸处增设电驱动机构,实现对断路器手车和接地刀闸的远程电动操作,并增加电动操作的五防闭锁。该改进提高了手车式高压开关柜操作的安全系数,保证了人身、设备安全,节省了操作工时和管理成本。
0 引言
随着智能电网的发展,开关设备智能化在国外和国内实际上已经历了多年研究,并且在智能变电站或新能源集控中心有了一些应用[1]。在传统的手车式高压开关柜断路器手车底盘和接地开关处增设电驱动机构,通过电气二次系统,可实现对步进电机的正反转控制,用以驱动小车的摇入、摇出和接地开关的分合闸操作。增加的电驱动部分模块化嵌入小车底盘和接地开关,不改变原有开关柜的结构和功能,所以不会对原开关柜的电气性能和机械性能造成影响。不打乱重构原有开关柜的五防闭锁,而是在原有开关柜完善的机械五防闭锁机构之外,再设计一套电气闭锁系统,两套五防既可共存又可独立起作用,相互不产生干涉,大大提高了高压设备操作的安全性。一方面,电动操作和手动操作共存,二者各自都可以独立操作,并实现自由切换,提高了操作的可靠性、灵活性。另一方面,两种操作互锁,确保在同一时间只能使用一种操作模式,从而确保了操作的安全性。
1 项目意义
目前,新能源电站设备分布广,作业点分散,安全管理人员数量少,无法对作业现场和现场运维人员实现实时安全可靠的监管,不能及时规避相关风险,并且存在一定的安全管理漏洞和风险。为进一步推广集中监控管理与电站定期巡检的模式,并有效提高电站运维效率,电站自动化控制程度需要进一步提高。基于此,提出了高压开关柜手车智能控制技术,该项控制技术有效提高了电站的自动化程度,同时也减少了运维值班人员巡检的工作量,降低了电站运维人员在操作开关柜分合闸过程中人身触电的风险。
2 项目实现功能及实施原理
2.1 实现的功能
(1)接地开关通过步进电机驱动,缓慢、平稳实现合闸/分闸操作。
(2)手动和电动操作机构间具有离合装置,使电动和手动操作相互独立。
(3)电动操作控制单元可远程和本地控制接地开关合闸/分闸,具有电动操作电机堵转保护和故障报警功能,当摇进/摇出操作过程中出现阻滞时进行故障报警,并及时控制步进电机停止运行,防止继续进行操作,损坏相关机械闭锁[2]。
(4)电动操作控制单元可通过位置辅助装置来监控合闸/分闸情况,避免高压拉弧对设备造成损坏,因为合闸与分闸过程中未完全完成合闸或分闸动作的断路器在通电或断电瞬间会出现高压拉弧现象。
(5)控制单元具有步进电机制动功能,以防止电动操作到位后电机因堵转损坏。
(6)接地开关本体带位置信号辅助节点,并具备完整的五防联锁功能。
2.2 断路器电动底盘车
电动底盘车的步进电机和丝杆的连接采用齿轮啮合传动结构,实现摇进/摇出操作。如图1所示,底盘车可分别进行手动和电动操作,手动和电动操作机构间具有螺母式离合装置,可在手动操作过程中的任何位置进行脱离,离合后可以使电动操作与手动操作相互独立。电动操作控制单元可通过远程控制来对底盘车进行摇进/摇出操作,同时电动操作模式下具有电机堵转保护和故障报警功能,在电动模式下,摇进/摇出操作过程中出现阻滞时会进行报警,并及时关闭步进电机,防止摇进/摇出操作继续进行,损坏相关机械闭锁。控制单元具有电机制动功能,以防止电动摇进/摇出操作完成后步进电机继续工作,导致步进电机堵转损坏。同时,底盘车本体带位置信号辅助节点来确定摇进/摇出操作是否完成并反馈分合闸情况到远程控制终端(人机交互端),具备完整的五防联锁功能。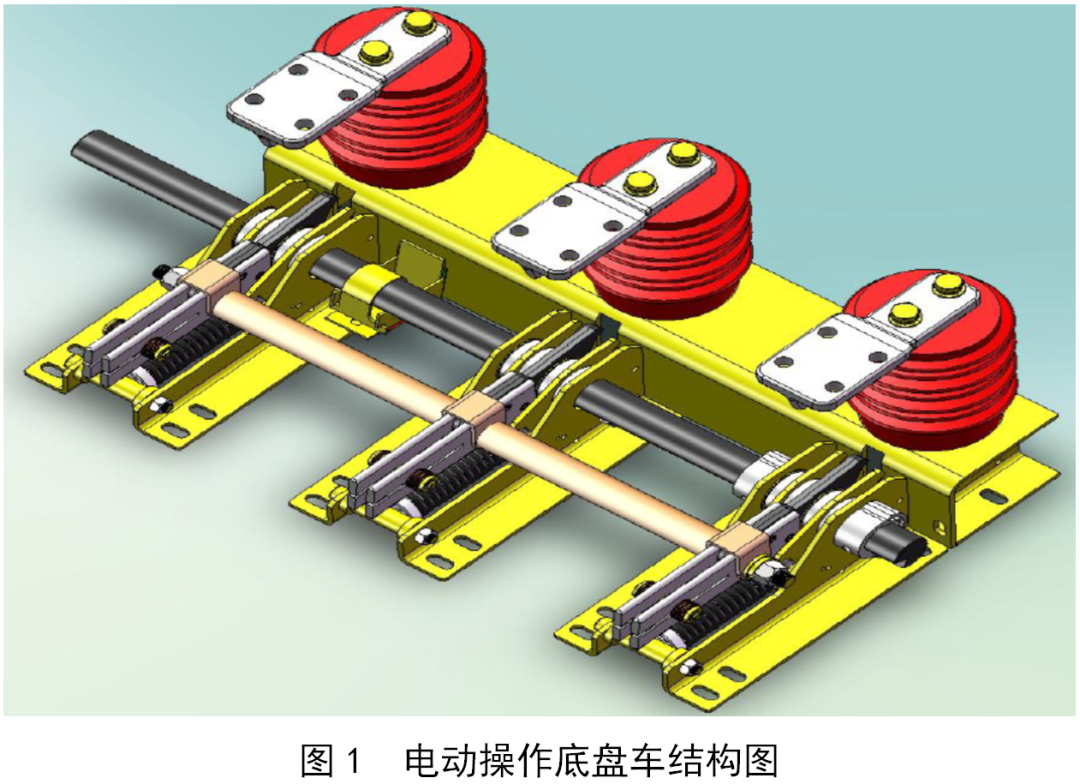
2.3 电动接地开关
电动操作主要针对JN15、JN17系列带关合能力的线路侧接地开关。如图2所示,结构上在手动操作的接地开关框架中加装电驱动装置及传动模块,配合操作控制单元(或和电动断路器控制器合成为二合一控制单元),实现接地开关的电动操作。 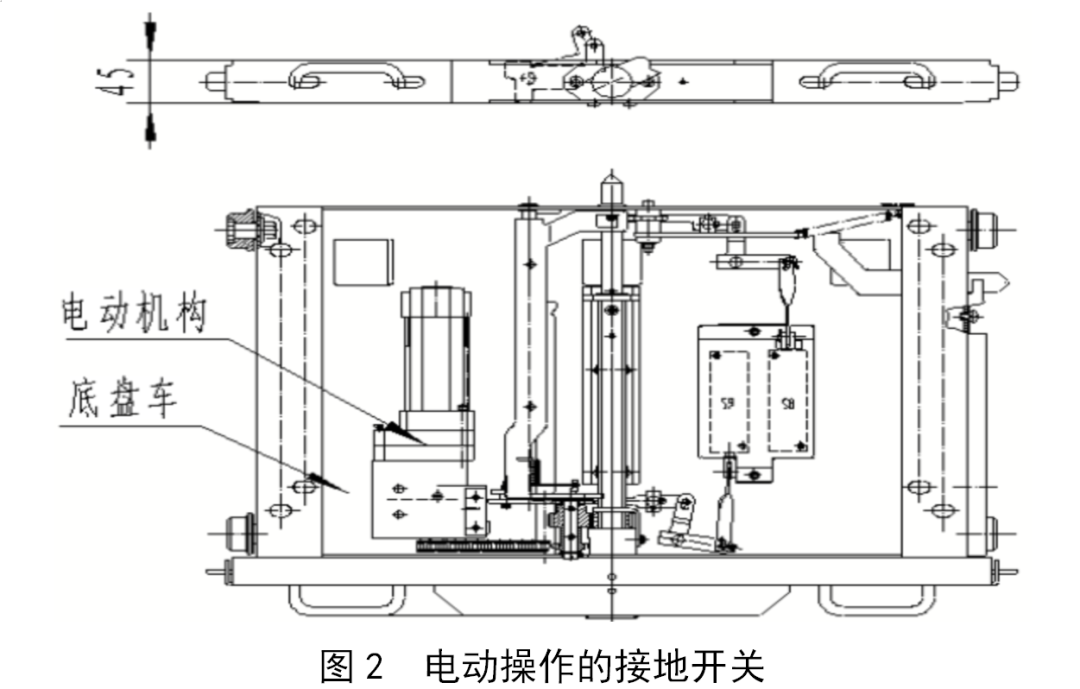
2.4 新增步进电机及电动控制装置工作原理
通过新增的AC/DC电源模块给远程电动控制装置提供所需直流电,远程控制装置内部由电源管理单元、步进电机控制单元、分合闸检测单元、中央处理单元、堵转检测单元、无线通信单元等构成。其中,电源管理单元负责将外部AC/DC电源模块提供的直流电转换为远程控制装置内部其他各单元所需的不同电压等级;步进电机控制单元用于接收中央处理单元传递过来的控制信号以驱动外部的步进电机;分合闸检测单元用来检测分闸/合闸的状态,将分合闸状态信息传递给中央处理单元进行数据处理;中央处理单元将从无线通信单元获得的控制命令,配合分合闸检测单元传递过来的分合闸状态信息进行处理,将处理完的信息传递给步进电机控制单元来驱动步进电机完成分合闸动作;堵转检测单元负责检测步进电机在运行过程中是否遇到阻滞情况,一旦遇到阻滞则传递信息给中央处理单元,中央处理单元接收到阻滞信号后立即发出停止运行的信号给步进电机控制单元,使步进电机停止运行;无线通信单元与远程控制终端进行无线通信,将从远程控制终端获得的控制命令数据传递给中央控制单元进行处理并执行,与此同时,将从中央处理单元传递过来的分合闸状态信息反馈到远程控制终端。
3 项目实施过程
3.1 断路器底盘车改造
传统手车式高压断路器小车的底盘是机械结构,如图3所示,该机械结构中不具备电动摇进/摇出机构,无法对其进行远程操控或电动操作,该项控制技术是通过在传统手车式高压断路器小车的底盘安装一个步进电机以及步进电机远程控制装置,同时改造断路器的二次接线,安装电动底盘车控制器,从而实现传统高压手车式开关的远程操控及本地的电动操作。 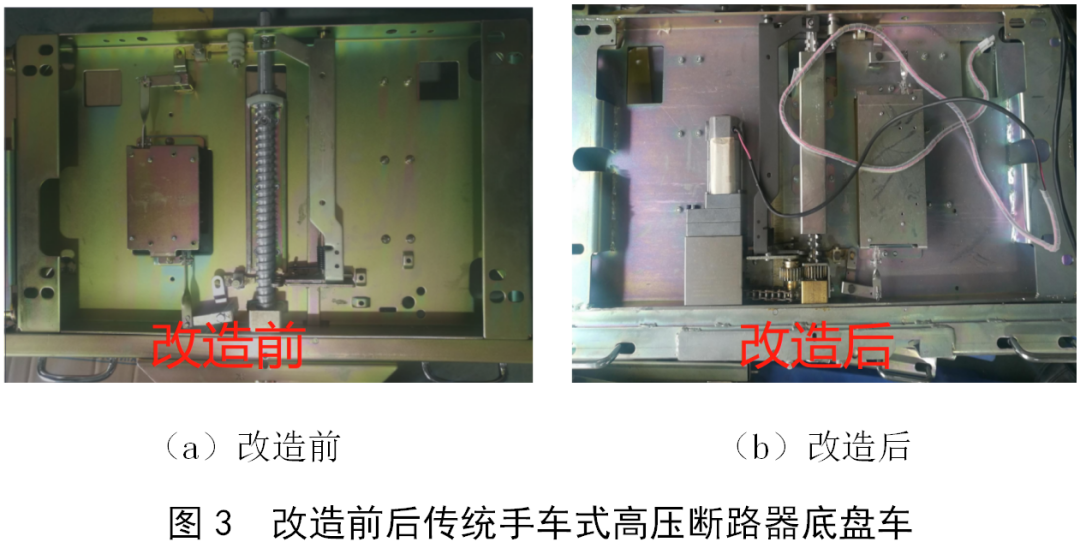
3.2 接地开关改造
传统手车式高压开关柜的接地开关是机械结构,如图4所示,该机械结构中不具备电动机及电动控制装置,无法对其进行远程操控或本地电动操作,该项控制技术是通过在传统手车式高压开关柜的接地开关处安装一个步进电机,同时增加电动地刀控制器、相关二次线回路及远程控制装置,从而实现传统手车式高压开关柜的接地开关远程操控或电动操作。 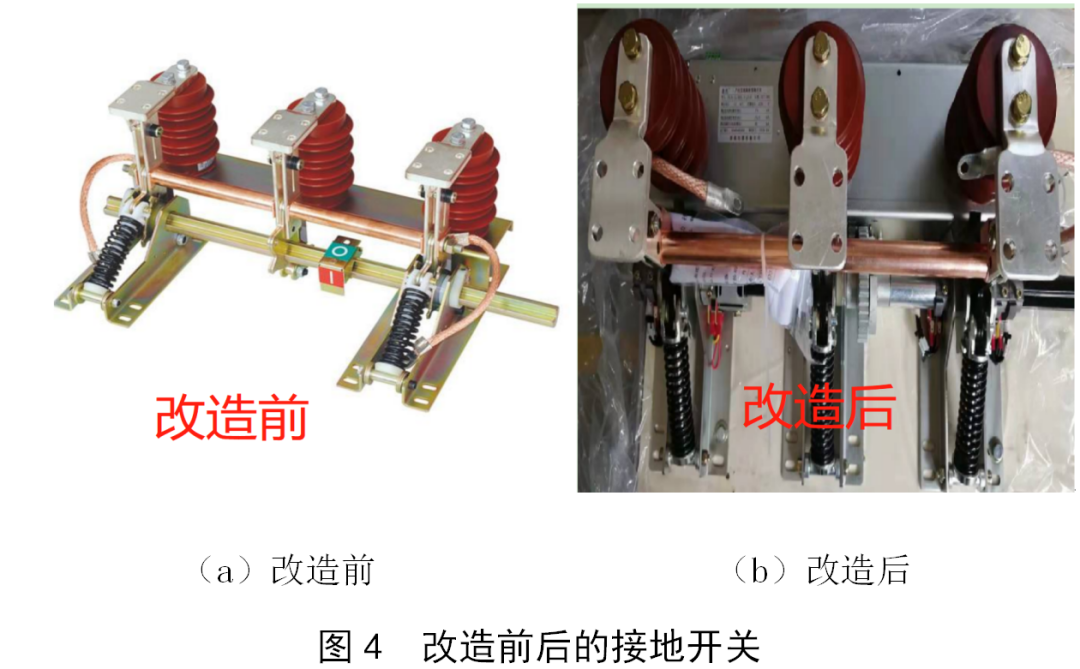
3.3 远程电动控制增加部分的硬件连接
远程控制装置的电源接口外接AC/DC电源转换模块,两个步进电机输出接口外接两个步进电机,用来驱动底盘车与接地刀,实现远程电动控制;远程控制装置的分合闸检测接口分别接入两路合闸与两路分闸位置辅助信号,用于检测底盘车与接地刀的分闸与合闸情况;远程控制装置的外部天线接口外接GPRS天线,用于无线电信号传输(注意天线不能放置在金属箱或金属笼中,以免信号被屏蔽,影响远程无线通信)。
4 具体实现过程描述
控制终端下发底盘车合闸命令,底盘车远程控制装置接口的无线通信单元接收控制终端下发的控制命令,将数据传递给中央控制单元进行处理,同时中央处理单元对位置辅助装置传递的底盘车位置信息进行处理,然后输出控制信号到步进电机控制单元控制步进电机正转,步进电机正向转动通过齿轮与轴承传动,底盘车实现摇进操作。当底盘车运行到“即将合闸”位置检测处,位置辅助装置输出信号传递到远程控制装置的分合闸检测单元,将输出信号传递到中央处理单元进行处理,中央处理单元输出减速信号给步进电机控制单元对步进电机进行减速处理,进而使底盘车缓慢运行,直到中央处理单元接收到位置辅助装置输出的合闸信号后输出停止信号给步进电机控制单元,控制步进电机停止运行,同时将完成摇进操作的状态信息通过通信单元传递给控制终端,整个摇进任务完成。
控制终端下发底盘车分闸命令,底盘车远程控制装置接口的无线通信单元接收控制终端下发的控制命令,将数据传递给中央控制单元进行处理,同时中央处理单元对位置辅助装置传递的底盘车位置信息进行处理,然后输出控制信号到步进电机控制单元控制步进电机反转,步进电机反向转动通过齿轮与轴承传动,底盘车实现摇出操作。当底盘车运行到“即将分闸”位置检测处,位置辅助装置输出信号传递到远程控制装置的分合闸检测单元,将输出信号传递到中央处理单元进行处理,中央处理单元输出减速信号给步进电机控制单元对步进电机进行减速处理,进而使底盘车缓慢运行,直到中央处理单元接收到位置辅助装置输出的分闸信号后输出停止信号给步进电机控制单元,控制步进电机停止运行,同时将完成摇出操作的状态信息通过通信单元传递给控制终端,整个摇出任务完成。
在底盘车摇进/摇出操作过程中,步进电机运行出现阻滞时,远程控制装置中堵转检测单元检测到步进电机堵转后,中央处理单元输出停止信号给步进电机控制单元来控制步进电机停止运转,同时将故障信号通过无线通信单元上报给控制终端进行故障报警,并将控制模式切换为手动控制模式。
5 创新点
(1)整体开关柜结构没有变动,增加的电驱动功能部分是以模块化形式嵌入底盘车和接地开关,不改变原有开关柜结构和功能,即不会对原开关柜的电气性能和机械性能造成影响。
(2)本次改进不会打乱重构原有开关柜的五防闭锁功能,而是在原有开关柜完善的机械五防闭锁机构之外,再新增设计一套电气闭锁系统,机械五防与电气五防这两套五防既可共存又可独立起作用,相互不产生干涉,大大提高了产品操作的安全性。
(3)电动操作模式与手动操作模式共存,二者各自都可以独立操作,并实现自由切换,提高了设备操作的灵活性。另一方面,两种操作模式互锁,确保同一时间内只能使用一种操作模式,确保了操作人员在操作过程中的安全性。
(4)具备运行状态及分/合闸状态检测功能,通过无线通信将运行状态信息反馈到管理终端,管理人员可以很容易地知道分/合闸情况。
(5)远程控制合闸/分闸,可实现多设备集中管理,大大提高了运维效率。
6 安全经济效益
6.1 管理收益
可以从根源上有效监控从设备到整个配电房的高压开关柜运行状态,制定切实可行的运维策略,形成标准化的运维管理流程和配单流程;同时,利用运行管理软件平台和配网设备运行状态管理数据库,实现了开关柜集中“三遥”功能。
可实现多个配电房集中管理与控制,且不受地理位置的限制。
6.2 经济收益
远程电动控制装置的加入,有效节约了在巡检路途中所耗费的人力及物力,可实现从事后检修到事前预防的转变,降低因故障引起的经济损失。通过有效地实时监测设备运行状况,运维人员可以及时对设备进行检修,避免设备因故障后不能及时检修导致使用寿命缩短,有效延长了设备使用寿命。
7 结语
该项研究成果可以转化为新产品,将成果应用到其他分布式新能源电站高压开关柜。将传统的手车式开关柜改为电动操作,提升了系统的可靠性,在保证人身安全的同时,使得开关柜在全生命周期成本上也极具优势。运维人员不用外出巡检即可在远程控制中心高效地完成日常运行操作与设备巡检,节省了大量的操作工时、管理成本和交通成本。
审核编辑:汤梓红
-
ASD系列开关柜综合测控装置用于3-35kV户内开关柜,适用于中置柜、手车柜、固定柜、环网柜# #电工 #安科瑞王金晶 2023-12-26
-
智能开关柜的设计2012-09-13 0
-
基于ZigBee无线技术的开关柜温度监测方案2014-08-20 0
-
祥泰电气铠装移开式交流金属高压开关柜的应用介绍2020-09-08 0
-
开关柜智能操控装置2路温湿度控制器液晶显示2020-09-17 0
-
高压开关柜怎么使用?2021-03-17 0
-
高压开关柜的种类及常见故障分析2021-05-10 0
-
HC KZC76 开关柜智能操控仪2009-12-18 903
-
XTKC-961F开关柜智能综合控制器2009-12-24 1096
-
高压开关柜结构图2018-09-25 36893
-
开关柜智能操控装置概述2021-11-16 2196
-
高压开关柜智能操控装置的功能特点2022-07-19 3868
-
智能操控装置在高压开关柜的应用2022-07-25 2198
-
10kV高压开关柜五防功能介绍2023-04-13 1243
-
35 kV手车开关转运平台的研制与应用2023-10-26 385
全部0条评论

快来发表一下你的评论吧 !
