

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成
电子说
描述
移动机器人是一个多功能于一体的综合系统,内容涵盖了传感器技术、自动化技术、信息处理、电子工程等,它集环境感知、动态决策与规划于一体,是目前科学技术发展最活跃的领域之一。移动机器人的各种组件之间需要协同工作才能实现机器人的自主移动。下面将详细介绍移动机器人的硬件组成,从传感器、运动控制到交互模块都在其范畴内。
1、控制系统:
控制系统是移动机器人最重要的部分,类似于人的大脑,用来接收传感器模块采集的数据,并进行信息处理分析,从而下发各种运动指令。控制系统需要基于处理器实现,使用ARM等可靠MCU处理器,其性能不同,可以根据机器人的应用选择。在处理器之上,控制系统需要完成机器人的算法处理、关节控制、人机交互等丰富功能。

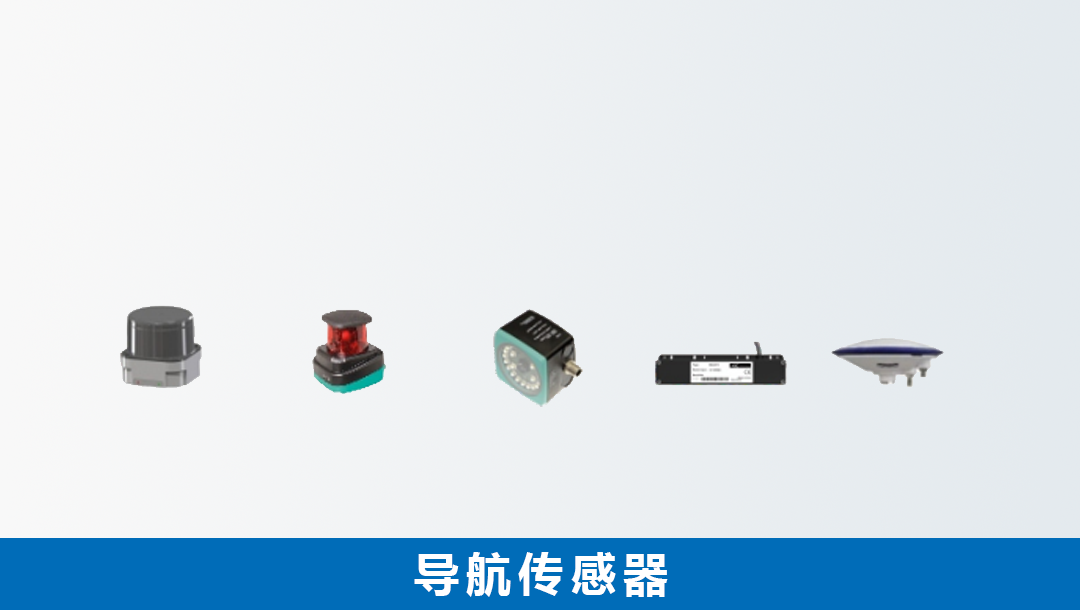
2、导航传感:
导航传感主要用于获取和感知周围环境信息,以提供给控制系统做出响应决策。常见的传感器包括:激光雷达、红外线传感器、超声波距离传感器、摄像头、陀螺仪等。通过这些传感器的协作,移动机器人才能够精确地定位目标位置,给出行动路线和地图,并识别障碍物等避免撞击。它能够让机器人在陌生的环境中自主移动,并快速地响应任何改变。
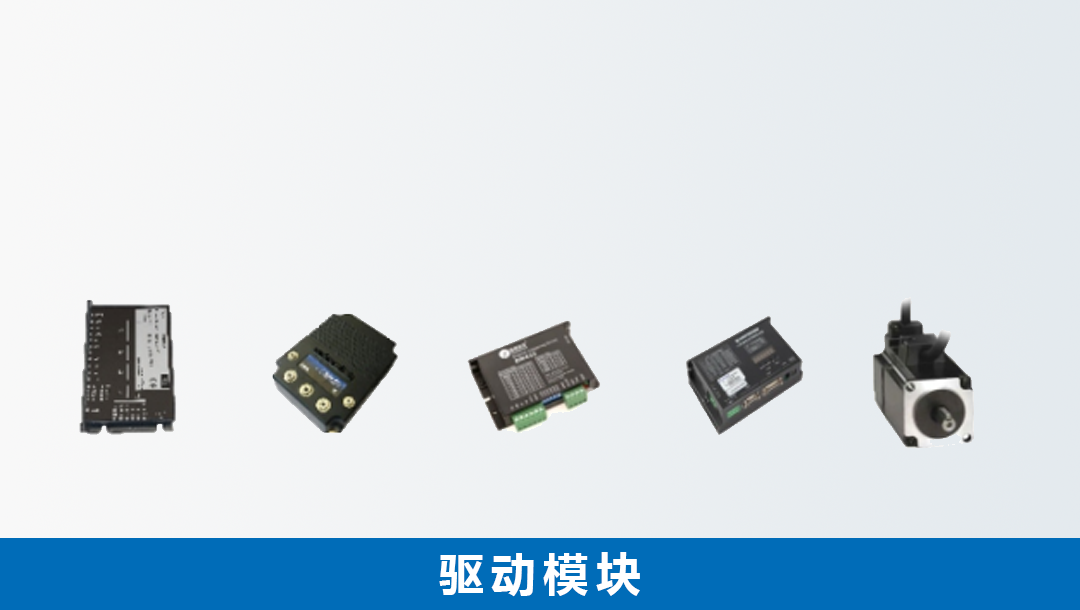
3、驱动模块:
驱动模块是帮助机器人移动的关键部件。它可以控制机器人的速度和方向,让机器人完成特定的任务。驱动模块的结构和设计决定机器人的稳定性、可靠性和运动能力。类似于人的四肢,通过双轮差速或多轮全向,响应中央主控器发送的速度消息,实时调节移动速度与运行方向,灵活转向以精确到达目标点。
4、安全检测
安全检测模块是主要为移动机器人提供安全保障,实现避障、绕障等功能,用于保护机器人和所有参与者的关键组成部分。它能够识别机器人周围的障碍物,并能够提醒人们物体的位置和状态,从而避免了潜在的事故发生。

5、交互模块
移动机器人最大的特点就是具有良好的交互体验设计,交互模块是机器人与人之间“沟通”的重要部分,是识别理解和分析决策模块的统称。交互模块主要包括呼叫模块、手操器、车载显示屏等。用户可通过交互模块下发指令,从而控制移动机器人动作。

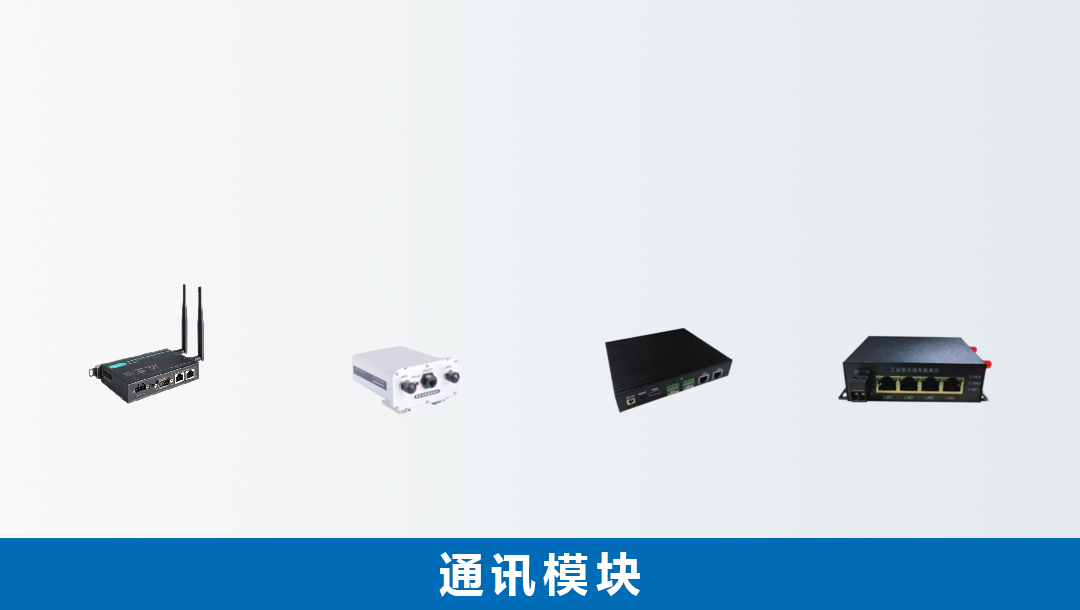
6、通讯模块
通讯模块是机器人远程控制和数据传输的重要组成部分。它能够在机器人和人之间建立有效的通信渠道,从而实现远程访问和管理。通过与WIFI、激光或线路上埋设的导线进行感应通信,从而实现AGV/AMR之间的避碰调度、工作状态检测、任务的调度。
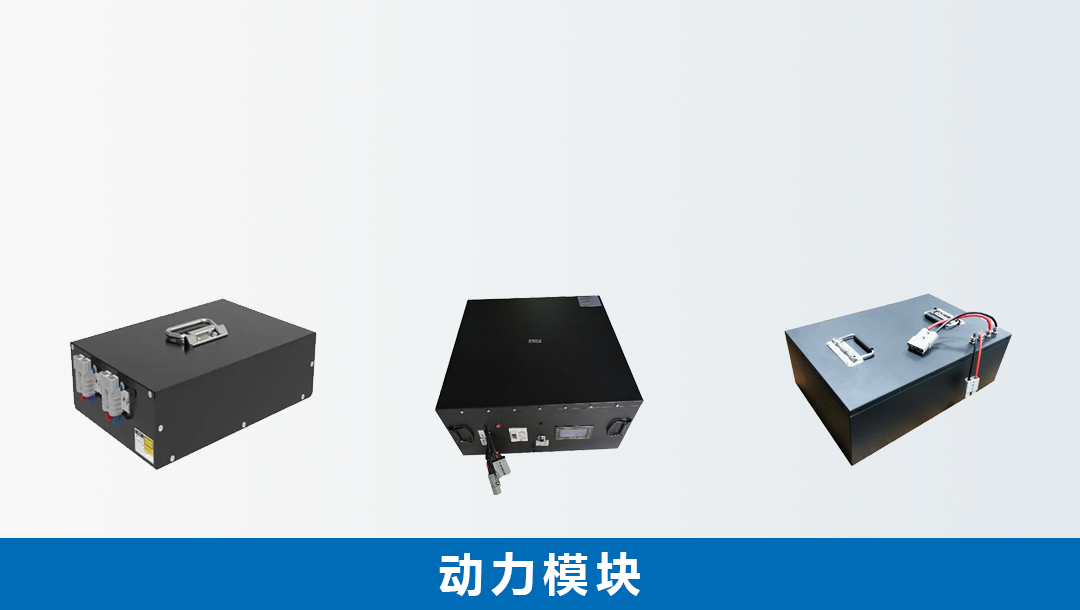
7、动力模块
电池是AGV/AMR动力提供。AGV电池的种类主要有铅酸蓄电池和锂电池两种。一般为蓄电池 24V,48V等,种类有铅酸电池、锂电池等。电池系统需具备检测电池使用状态、充电状态并把状态报告发送给控制中心。
8、执行机构
执行机构是是直接面向工作对象的机械装置,相当于人体的手和脚,也是机器人完成各项任务的关键部分,它能够控制机器人的动作。根据不同的工作对象,适用的执行机构也不同。

审核编辑 黄宇
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2208
-
【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成2023-04-20 2580
-
【科普】干货!带你从0了解移动机器人(一)—— 什么是移动机器人2023-03-13 5204
-
详解移动机器人软硬件系统问题2021-11-11 2615
-
移动机器人的三种主要运动系统2021-09-01 2260
-
什么是移动机器人软硬件系统问题2021-08-06 2537
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 3005
-
如何实现移动机器人的设计?2020-11-23 3333
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4151
-
移动机器人的分类与移动机器人技术研究现状和未来发展的分析2017-09-16 1673
-
Labview My RIO 移动机器人2016-08-21 13668
-
资料:移动机器人能否自动充电?2016-01-20 5192
-
移动机器人常用传感器2012-08-20 6958
全部0条评论

快来发表一下你的评论吧 !
