

如何通过修改TCP数据来批量偏移轨迹的方法
机器人
554人已加入
描述
小伙伴们在日常应用ABB机器人过程中,也遇到过在更换不同工具后由于工具的差异造成轨迹偏差的问题吧?今天分享一下如何通过修改TCP数据来批量偏移轨迹的方法。(结尾附程序)
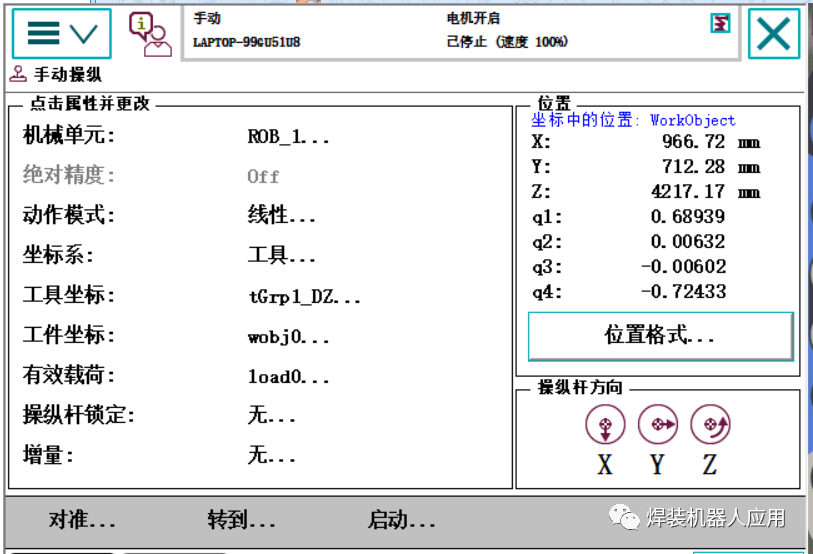
第一步 :使用原始工具示教一个参考点,注意使用的tooldata与工具一致。
第二步 :更换新的工具,手动增量模式操作摇杆,将新工具的TCP点与参考点对齐,与第一步位置一致,并记录XYZ各方向的移动数据,例如;X 72,Y 0,Z 92。
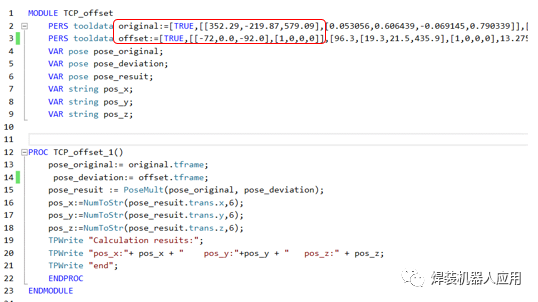
第三步 :准备笔记本电脑,将TCP_offset模块导入电脑虚拟系统,打开程序将原始的工具数据中的“tframe”值更新到original变量内,将第二步记录的数据取反,更新到offset变量内例如;X -72,Y 0,Z -92,四元组设置为Q1 1,Q2 0,Q3 0,Q4 0表示坐标系的转角无变化。
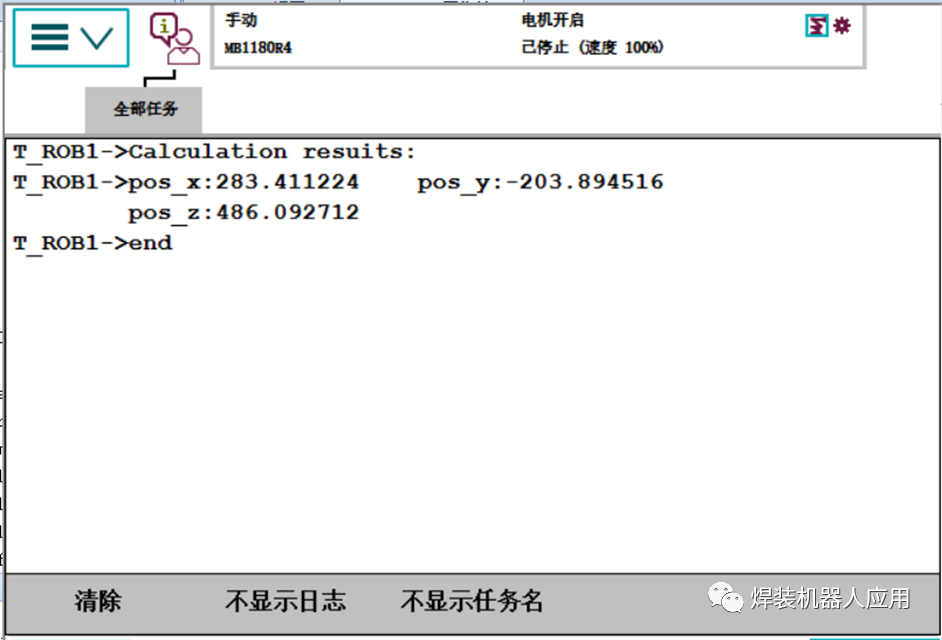
第四步 :运行TCP_offset_1()程序显示出计算结果;pos_x,pos_y,pos_z数据。
第五步:将运算出的tooldata结果数据更新到原始的tooldata数据中。

第六步:运行第一步示教的参考程序,工具的TCP可以运行到参考点,表示偏移成功。
程序代码:
MODULE TCP_offset
PERS tooldata original:=[TRUE,[[352.29,-219.87,579.09],[0.053056,0.606439,-0.069145,0.790339]],[96.3,[19.3,21.5,435.9],[1,0,0,0],13.275,13.407,2.633]];
PERS tooldata deviation:=[TRUE,[[-72,0.0,-92.0],[1,0,0,0]],[96.3,[19.3,21.5,435.9],[1,0,0,0],13.275,13.407,2.633]];
VAR pose pose_original;
VAR pose pose_deviation;
VAR pose pose_resuit;
VAR string pos_x;
VAR string pos_y;
VAR string pos_z;
PROC TCP_offset_1()
pose_original:= original.tframe;
pose_deviation:= deviation.tframe;
pose_resuit := PoseMult(pose_original, pose_deviation);
pos_x:=NumToStr(pose_resuit.trans.x,6);
pos_y:=NumToStr(pose_resuit.trans.y,6);
pos_z:=NumToStr(pose_resuit.trans.z,6);
TPWrite "Calculation resuits:";
TPWrite "pos_x:"+ pos_x + " pos_y:"+pos_y + " pos_z:" + pos_z;
TPWrite "end";
ENDPROC
ENDMODULE
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Protel DXP的批量修改功能2009-04-15 1198
-
Protel DXP批量修改如何使用2009-07-02 4118
-
altium-designer中批量修改PCB线宽的方法2016-07-22 3611
-
TxtModify Txt文件内容批量修改工具2017-02-28 1025
-
cad批量修改工具免费版下载2017-12-08 1118
-
基于运动状态改变的GPS轨迹数据压缩算法2017-12-26 1105
-
移动轨迹数据去匿名化攻击方法2018-03-20 1206
-
Protel DXP批量修改的原理和步骤2018-04-28 2830
-
Altium designer教程之Altium designer09原理图批量信息修改方法概述2018-11-21 2468
-
EPLAN的批量修改功能2019-05-14 35649
-
如何使用Protel DXP的批量修改2019-07-31 2054
-
Protel99se批量修改元件封装的方法2019-09-07 17586
-
Orcad批量修改网络标号的方法2022-01-19 22671
-
基于vba自动批量修改照片大小2022-02-11 719
-
一种基于自然语言的轨迹修正方法2024-01-19 1575
全部0条评论

快来发表一下你的评论吧 !
