

Mastercam后处理机器定义说明
电子说
1.4w人已加入
描述
Mastercam后处理在开发5轴后处理的时候,始终绕不开的一个就是机器的定义,由于机器的结构种类繁多,各个厂家生产不同结构的5轴机器,那么在开发5轴后处理时,比如要定义机器各轴的结构类型,否则后处理无法正确的计算刀轨。
在Mastercam后处理中,5轴机器中的2个旋转轴共分为6大类,各旋转轴的类型如下:
旋转轴类型:双转台
#0 = Table/Table
旋转轴类型:一转台一摆头
#1 = Tilt Head/Table
旋转轴类型:双摆头
#2 = Head/Head
旋转轴类型:非正交双转台
#3 = Nutator Table/Table
旋转轴类型:非正交一转台一摆头
#4 = Nutator Tilt Head/Table
旋转轴类型:非正交双摆头
#5 = Nutator Head/Head
同时机器的类型有如下分类:
1:主轴平行Z轴,Z轴垂直地面,代表类型:立式机器
2:主轴平行Z轴,Y轴垂直地面,代表类型:卧式机器
3:C轴Z轴平行,Z轴平行地面,代表类型:车铣5轴类
4:其他类型 :其他类型
在开发5轴后处理时首先需要定义机器XYZ轴的结构,只有3个基础轴确定了,才能够定义2个旋转轴的旋转方向及旋转轴。
机器基础轴的定义函数:
matb1$-matb9$
由于机器有3个基础轴,每个基础轴有存在多种形式,所有机器的基础轴同样采用了一个3x3的矩阵来定义及体现机器的3个基础轴的各种类型。
3x3矩阵中,每一行代表着一个基础轴,如下:
matb1$–matb3$:表示X轴,即Xx,Xx,Xzmatb4$–matb6$:表示Y轴,即Yx,Yy,Yzmatb7$–matb9$:表示Z轴,即Zx,Zy,Zz
如下图所示:
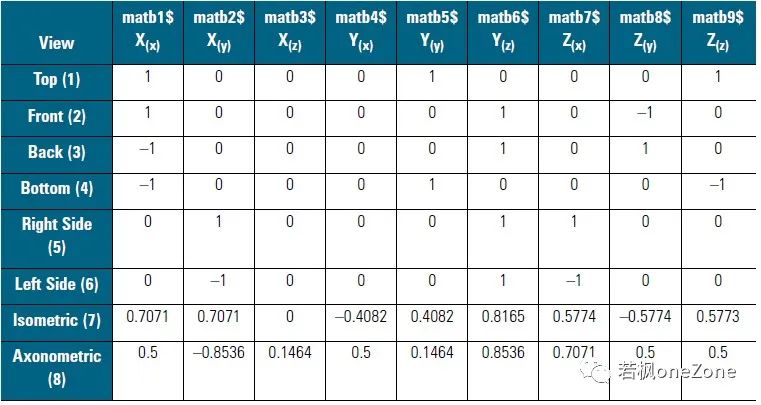
由上表可以看出通过3x3矩阵的方式可以定义出任何结构的形式机器。
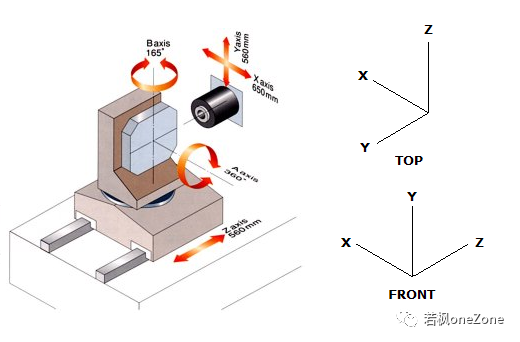
那么如何定义机器的3个基础轴,如下图机器的机构,首先通过右侧的坐标系可以判断机器的类型为卧式机器(Front),因此,通过上图可以看出卧式机器的定义如下:
matb1$ : 1
matb2$ : 0
matb3$ : 0
matb4$ : 0
matb5$ : 0
matb6$ : 1
matb7$ : 0
matb8$ : -1
matb9$ : 0
最终的定义如下:
# --------------------------------------------------------------------------
# Machine settings
# --------------------------------------------------------------------------
#Machine base matrix (Base to map positions into)
#Base is relative 2 WCS# T S F B
matb1$ : 1 # 1 0 1 0 Enter base?
matb2$ : 0 # 0 1 0 -1 Enter base?
matb3$ : 0 # 0 0 0 0 Enter base?
matb4$ : 0 # 0 0 0 0 Enter base?
matb5$ : 0 # 1 0 0 0 Enter base?
matb6$ : 1 # 0 1 1 1 Enter base?
matb7$ : 0 # 0 1 0 -1 Enter base?
matb8$ : -1 # 0 0 -1 0 Enter base?
matb9$ : 0 # 1 0 0 0 Enter base?
3个基础轴定义好了之后,就可以定义2个旋转轴.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Mastercam 2025 官方电脑配置推荐2024-12-20 2627
-
INtime RTOS内部的关键处理机制是什么2021-09-29 1328
-
出保的车后处理有问题该怎么办?2021-01-18 4658
-
为大家带来后处理尿素泵针脚定义总结2020-12-08 9722
-
使用Python的焊接后处理的详细说明2020-10-20 2260
-
解析PCB电镀后处理的12类处理方法工艺2019-02-25 5981
-
基于自定义架构的局部处理机2018-01-10 838
-
基于FPGA的视频后处理系统2015-10-30 602
-
危险品处理机器人控制电路设计 —电路图天天读(47)2014-11-17 2084
-
MasterCAM后处理文件应用2010-09-11 1253
-
多处理机的应用2010-04-13 1126
-
MAX716构成的微处理机电源电路2009-12-31 1484
-
linux处理机调度与死锁2009-04-28 688
-
Cortex-M3的异常处理机制分析2009-03-29 2417
全部0条评论

快来发表一下你的评论吧 !
