

 [esp32教程] 4、LEDC使用
[esp32教程] 4、LEDC使用
描述
0、前期准备
1、参考上一篇文章搭建好esp32环境
2、准备好一块esp32开发开发板(本作者使用了esp32c3作为开发平台)
1、知识储备
1.1 概述
LEDC是乐鑫公司专门开发,通过PWM来控制LED,具有软件控制占空比以及硬件自动控制占空比的方式。同时据说也可以用来控制电机。
1.2 功能架构
LEDC有4个定时器可以独立配置,定时器时钟来源有三个时钟源,分别是:APB_CLK、RC_FAST_CLK 和 XTAL_CLK。
架构图如下所示:
1.3 LEDC配置流程介绍
LEDC的配置流程可分为以下3步
1、定时器配置:设置PWM 频率和占空比分辨率(位数)
2、通道配置:设置定时器通道以及PWM的输出引脚
3、 修改占空比
1、定时器配置
定时器的配置主要是给 ledc_timer_config_t 结构体赋值,然后通过ledc_timer_config函数进行对定时器设置
以下对ledc_timer_config_t 结构体进行说明
typedef struct {
ledc_mode_t speed_mode; // ledc速度模式:LEDC_HIGH_SPEED_MODE和LEDC_LOW_SPEED_MODE
union {
ledc_timer_bit_t duty_resolution; //占空比的分分辨率
ledc_timer_bit_t bit_num __attribute__((deprecated)); //esp-idf 3.1以上已经使用该参数
};
ledc_timer_t timer_num; //定时器编号
uint32_t freq_hz; //pwm频率
ledc_clk_cfg_t clk_cfg; //时钟源:
} ledc_timer_config_t;
例子:
// 定时器配置
ledc_timer_config_t ledcTimerConfig = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_13_BIT,
.clk_cfg = LEDC_AUTO_CLK,
.freq_hz = 5000,
.timer_num = LEDC_TIMER_0,
};
ledc_timer_config(&ledcTimerConfig);
2、通道配置
通道的配置主要是给 ledc_channel_config_t 结构体赋值,然后通过ledc_channel_config函数进行通道设置。
以下对ledc_channel_config_t 结构体进行说明
typedef struct {
int gpio_num;//输出pwm的gpio口
ledc_mode_t speed_mode// ledc速度模式:LEDC_HIGH_SPEED_MODE和LEDC_LOW_SPEED_MODE
ledc_channel_t channel; // ledc的输出通道:
ledc_intr_type_t intr_type; //是否使能中断,如果使能中断之后,需要使用ledc_isr_register函数,进行中断注册,在渐变完成之后,就会调用中断函数
ledc_timer_t timer_sel;//设置使用哪一个定时器,需要和ledc_timer_config_t配置的一致
uint32_t duty;//占空比
int hpoint;//上升沿出现的位置,一般设置为0,最大值为0xfffff
struct {
unsigned int output_invert: 1;//电平是否翻转,1:0- >1, 0:1- >0
} flags;
} ledc_channel_config_t;
例子:
// 通道配置
ledc_channel_config_t ledcChannelConfig = {
.gpio_num = GPIO_NUM_14,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_0,
.duty = 0,
.hpoint = 0,
.flags.output_invert = 0,
};
ledc_channel_config(&ledcChannelConfig);
3、 修改占空比
ledc占空比可以通过,软件和硬件两个方式进行设置。
软件方式:主要涉及了ledc_set_duty和ledc_update_duty两个函数,其中
ledc_set_duty:用来设置占空比
ledc_update_duty:使设置生效,
函数参数说明如下:
esp_err_t ledc_set_duty(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t duty);
//参数:speed_mode:ledc速度模式,要和ledc_channel_config_t的speed_mode保持一致
// channel:通道,要和ledc_channel_config_t的channel保持一致
// duty:占空比,取值范围:0 ~ (2^duty_resolution) - 1
esp_err_t ledc_update_duty(ledc_mode_t speed_mode, ledc_channel_t channel);
//参数:speed_mode:ledc速度模式,要和ledc_channel_config_t的speed_mode保持一致
// channel:通道,要和ledc_channel_config_t的channel保持一致
硬件方式:主要涉及到了ledc_fade_func_install、ledc_set_fade_with_step、ledc_set_fade_with_time和ledc_fade_start几个函数,其中
ledc_fade_func_install:用来使能硬件,使得硬件能够改变占空比,
ledc_set_fade_with_step:用于设置渐变的步长
ledc_set_fade_with_time:用于设置渐变到某一个值,一般ledc_set_fade_with_step和ledc_set_fade_with_time使用其中一个即可
ledc_fade_start:开始渐变
(注意:ledc_set_fade_with_time和ledc_fade_start不是线程安全的,不要在不同的任务中同时调用这些函数来控制一个ledc通道,API的线程安全版本是ledc_set_fade_step_and_start)
函数参数说明如下:
esp_err_t ledc_fade_func_install(int intr_alloc_flags);
//参数:intr_alloc_flags:用于分配中断的标志,一般填0即可
esp_err_t ledc_set_fade_with_step(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, uint32_t scale, uint32_t cycle_num);
// 参数 :speed_mode:ledc速度模式,要和ledc_channel_config_t的speed_mode保持一致
// channel:通道,要和ledc_channel_config_t的channel保持一致
// target_duty: 目标占空比,取值范围:0 ~ (2^duty_resolution) - 1
// scale:控制增加或减少步长比例。
// cycle_num:每cycle_num个周期增加或减少占空比
esp_err_t ledc_set_fade_with_time(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, int max_fade_time_ms);
// 参数 :speed_mode:ledc速度模式,要和ledc_channel_config_t的speed_mode保持一致
// channel:通道,要和ledc_channel_config_t的channel保持一致
// target_duty: 目标占空比,取值范围:0 ~ (2^duty_resolution) - 1
// max_fade_time_ms:减到目标占空比花费的时间
esp_err_t ledc_fade_start(ledc_mode_t speed_mode, ledc_channel_t channel, ledc_fade_mode_t fade_mode);
// 参数 :speed_mode:ledc速度模式,要和ledc_channel_config_t的speed_mode保持一致
// channel:通道,要和ledc_channel_config_t的channel保持一致
// fade_mode: 渐变模式,阻塞(LEDC_FADE_WAIT_DONE)和非阻塞(LEDC_FADE_NO_WAIT)
2、新建工程
idf.py create-project project_led # 新建工程
cd project_led
idf.py set-target esp32c3 # 设置工程使用的芯片
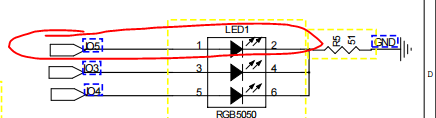
2、查看原理图确定按键控制引脚
3、编写程序
本例子是使用软件,配置占空比方式,有兴趣的小伙伴可以尝试使用硬件方式
#include
#include
#include
#include
void app_main(void) {
// 定时器配置
ledc_timer_config_t ledcTimerConfig = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_13_BIT,
.clk_cfg = LEDC_AUTO_CLK,
.freq_hz = 5000,
.timer_num = LEDC_TIMER_0,
};
ledc_timer_config(&ledcTimerConfig);
// 通道配置
ledc_channel_config_t ledcChannelConfig = {
.gpio_num = GPIO_NUM_5,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_0,
.duty = 0,
.hpoint = 0,
.flags.output_invert = 0,
};
ledc_channel_config(&ledcChannelConfig);
float duty_num = 0;
int der = 1;
while (pdTRUE) {
ledc_set_duty(LEDC_LOW_SPEED_MODE,LEDC_CHANNEL_0,(int)(8191*(duty_num/200)));
ledc_update_duty(LEDC_LOW_SPEED_MODE,LEDC_CHANNEL_0);
if(duty_num == 200)
der = 0;
else if(duty_num == 0)
der = 1;
if (der == 1)
duty_num +=1;
else
duty_num -=1;
vTaskDelay(10/portTICK_PERIOD_MS);
}
}
4、编译下载
#编译
idf.py build
#烧录以及查看日志,使用ctrl+] 可以退出监视窗口
idf.py -p /dev/ttyUSB0 flash monitor
审核编辑:汤梓红
-
ESP32-C6的LEDC PWM讯号在light sleep时无法持续产生是怎么回事?2024-06-05 698
-
ESP32 LEDC初始化通道时GPIO会输出短暂低电平,为什么?2024-06-26 1062
-
求助,关于ESP32C3自动light sleep模式下RMT,LEDC, ADC配置问题求解2024-07-19 1454
-
ESP32模组的主要特性2021-11-04 5246
-
ESP32开发套件 ESP32-DevKitC2021-01-06 10639
-
ESP32驱动0.96寸彩屏2021-06-07 3203
-
ESP32 SDIO 使用教程2021-11-23 2849
-
ESP32系列芯片的规格2022-04-25 3537
-
基于ESP32 U4WDH的USB功率计2022-08-04 963
-
ESP32 PWM驱动电机2023-03-20 1351
-
如何使用ESP32的LEDC进行PWM控制?2023-05-19 4617
-
ESP32到ESP32通过Internet进行通信2023-06-15 1902
-
ESP32-PICO系列技术规格书2023-12-12 1019
-
乐鑫科技发布全新ESP32-H4 SoC2024-05-06 2953
-
乐鑫科技新品ESP32-H4亮点速递!2026-04-16 946
全部0条评论

快来发表一下你的评论吧 !
