

KUKA机器人首次投入运行的整个步骤
描述
在首次接通连有机器人本体运动机构的 KR C4 时务必考虑以下步骤。
这些步骤不能取代首次投入运行的整个步骤!
1. 接通 KR C4。
2. 选择运行方式 T1。
3. 显示以下查询:"RDC 存储器和控制系统不一致 什么被更换了? "
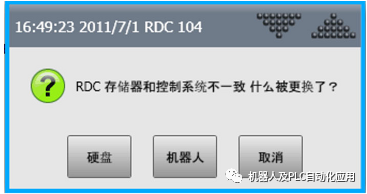
用按键 机器人 确认。
5. 显示以下信息:网络配置已还原.
用按键 OK 确认。
6. 用按键 全部 OK 确认在信息窗口可以被确认的所有信息。

1 主菜单按键
2 信息窗口
3 按键 全部 OK
7. 以下信息无法确认:
KSS15068安全配置的校验总和不正确。
KSS12017未确认操作人员防护装置
KSS00404安全停止
为了确认这类信息,必须均衡机器人 (RDC) 和机器人控制器之间的安全配置:按下主菜单按键,并选择菜单序列配置 > 用户组。然后按下登录...。
8. 选定用户组 安全维护人员。在使用 KUKA.SafeOperation 时,选定用户组安全调试员。
9. 输入密码(默认:kuka),然后用 登录确认。(大众版本可直接使用专家盘进入专家模式).
10.确认信息 KSS15068 和 KSS00404:
按下主菜单按键,并选择菜单序列配置 > 安全配置。
在窗口故障排除助手中即显示可能的故障原因的概览。
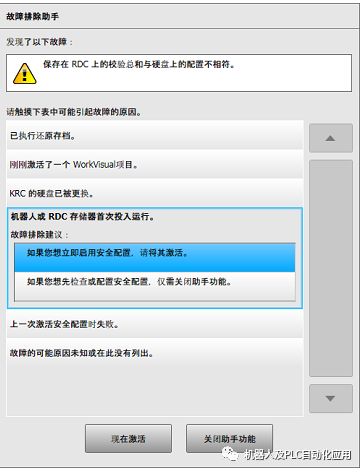
在该列表中选中字段:机器人或 RDC 存储器首次投入运行。
在所选中字段的下面即显示排除建议。
在此选中字段:如果您想立即启用安全配置,请将其激活。
按下按键现在激活。窗口通用自动打开。
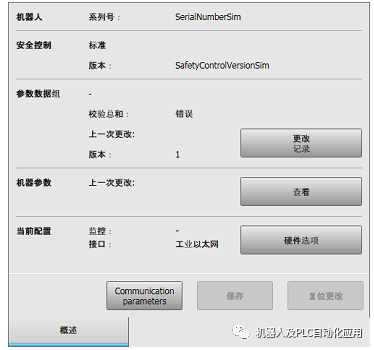
窗口通用通过关闭图标 关闭。
显示以下信息:已成功保存改动。用按键 OK 确认。
11.确认信息 KSS12017(在此过程中要区分两种情况):
机器人有 X11 时的方法:用防护门上的确认键确认。
机器人无 X11 时的方法 (IBN-T1):按下主菜单按键,并选择菜单序
列投入运行 > 售后服务 > 投入运行模式。
-
KUKA重型机器人2015-02-03 8134
-
求KUKA机器人控制柜三维模型2016-04-18 6340
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4280
-
KUKA机器人问题解答2019-07-15 2530
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12145
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10786
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7884
-
工业机器人组成结构相关资料分享2021-07-05 2562
-
库卡机器人MGV电源模块维修2021-09-08 1720
-
KUKA机器人伺服驱动模块维修2021-09-17 1750
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3776
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2113
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1451
-
更改KUKA机器人系统时间的操作步骤2023-05-29 10188
-
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2023-07-05 9022
全部0条评论

快来发表一下你的评论吧 !
