

异步电机矢量控制算法基础(下)
电子说
描述
5.6 )SVPWM实现过程
从上节的分析可知,哪几个电压空间矢量和其作用的时间是SVPWM的两个根本的问题。要实现SVPWM,仿真搭建时需要注意和解决的几个问题。
(1)、电压空间矢量所在扇区的判断;
(2)、基本矢量作用时间的计算;
(3)、基本矢量的作用顺序及扇区切换点时间确定。
只要解决以上3个问题,就能实现SVPWM。
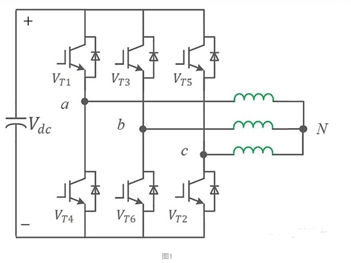

下面我们用一个小例子来理解PWM信号。图2是一个直流电路,它有一个电阻,一个开关,一个灯泡,和一个驱动灯泡的10V直流电压源。我们如何能得到2.5V电压驱动下的灯泡亮度呢?


5.6.1 )SVPWM理论讲解

该状态对应的电机绕组连接图如下:












5.6.1 )扇区判断
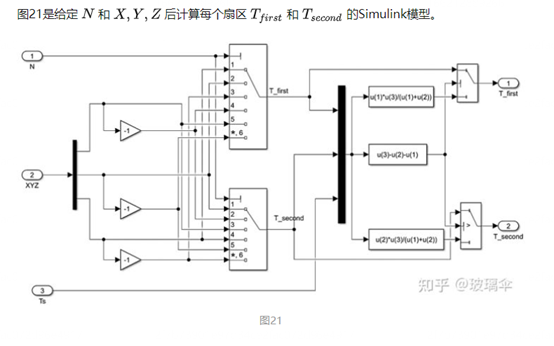
5.6.2 )基本矢量作用时间计算
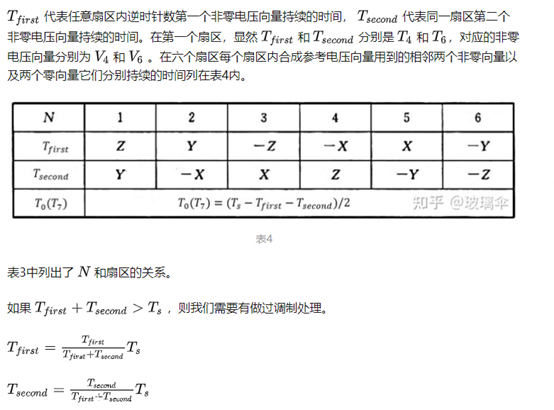

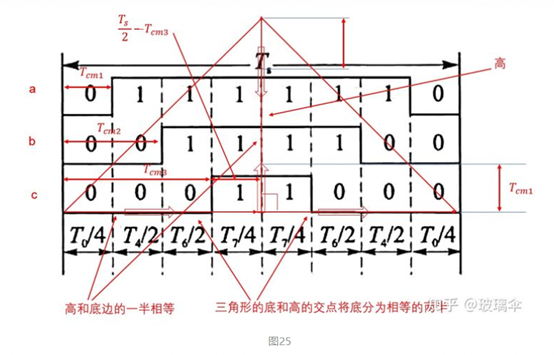
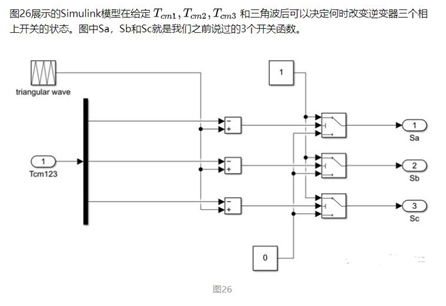
5.6.3 )基本矢量的作用顺序及扇区切换点时间确定


5.7 )小结
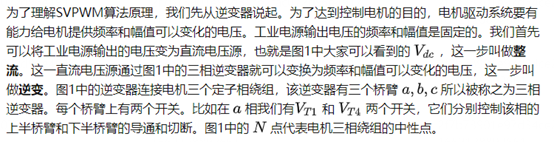
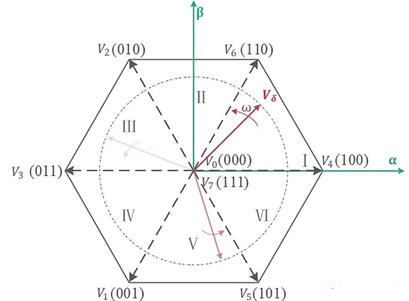
电压空间矢量调制技术(SVPWM ,Space Vector Pulse Width Modulation)是从控制电机中推导出来的。由于电机旋转时产生圆形的旋转磁场,可以把逆变器和交流电机当成是一个整体考虑,按照交流电机产生圆形磁场来控制逆变器,这时的逆变器输出波形会更好。SVPWM也可以叫磁链跟踪控制,它是在假象的静止坐标系下控制不同电压矢量得到的。SVPWM算法的理论基础是平均值等效原理,即在一个开关周期Ts内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。所以SVPWM的实质就是用逆变器可输出的电压空间矢量与作用时间的线性组合去逼近所期望的电压空间矢量,具体的做法就是对逆变器中功率器件的开通和关断状态进行正确控制。
2.2****仿真建模
2.2.1电机参数

2.2.2电机运行的工况
仿真中异步电机的参数如上表所示。仿真运行的采样率为5K,在0.7秒前,速度参考值设为1500r/min,在0.7秒后参考速度设置为1000r/min。在0.4秒前,电机空载,在0.4秒之后给电机加14N.m的负载。
2.2.3仿真波形分析

图2-6 仿真波形变化情况
从上图可知,电机转速动态响应快,实际值能快速跟踪上参考值。在突加载的情况下,速度有跌落的现象,但能够快速恢复到原稳态值。转矩分量和励磁分量能够实现完全解耦,且定子电流随电机的加载情况做出相应的变化。整体来说,仿真运行的情况与理论相符,验证所搭的异步电机矢量控制仿真系统的可行性和有效性。
2.3、 总结
FOC控制的本质其实就是解耦。借助电角度,把三相侧电流变换到旋转两相侧(也就是clark,park变换),然后在旋转两相侧实现转矩和磁链的单独控制。以上的分析都是依托于MATLAB/simulink仿真进行的,接下来会尝试进行硬件平台方面的设计和实现并结合现在工业中使用的FOC进一步深化学习异步电机矢量控制。
-
三相异步电机矢量控制系统的仿真2025-06-16 247
-
基于三电平SVPWM发波的异步电机矢量控制学习2023-03-30 1051
-
异步电机矢量控制介绍2023-03-29 964
-
交流异步电机矢量控制原理2023-03-27 963
-
SPWM异步电机矢量控制电流滞环矢量控制2021-09-06 2021
-
异步电机_矢量控制2017-11-29 1316
-
基于SVPWM的异步电机矢量控制调速系统仿真2016-04-18 788
-
异步电机的模糊PID矢量控制2016-04-06 890
-
异步电机SVPWM矢量控制系统仿真2016-03-30 589
-
异步电机的无速度传感矢量控制设计2016-01-21 4899
-
基于DSP的异步电机矢量控制系统设计2010-01-22 2578
全部0条评论

快来发表一下你的评论吧 !
