

如何制作低成本但全自动的洗手液分配器电路
描述
在本文中,我们将学习如何制作低成本但全自动的洗手液分配器电路,该电路将允许在用户手上以非接触式或非接触式分配消毒液。
这种非接触式洗手液回路便于用户自动访问手上的消毒液,而无需手动操作或触摸消毒液瓶泵。该功能可确保病毒没有机会通过物理接触消毒剂瓶及其操作部件进行传播。
但是,要实现自动化,系统将需要某种传感器来检测分配器单元下方是否存在人或人手。
为此,我们采用最基本的人体传感器单元,即PIR或被动红外设备。
基本工作细节
PIR 设计用于检测人体的红外热量,并在其输出引脚上产生相应的电脉冲。
该脉冲用于激活基于单触发计时器的继电器驱动器级,该级暂时激活继电器,并为弹簧加载的电磁阀供电。
电磁阀推动消毒剂瓶的泵轴,将液体分配到用户手中。下图中可以可视化该概念。

上图中的电磁阀连接到单稳态电路的输出。
单稳态电路是一种响应瞬时输入触发而产生瞬时高输出的配置。无论输入触发持续时间如何,输出在预定的固定周期内都保持高电平。
在这个自动消毒器分配器电路中,一旦PIR检测到接近的人手,单稳态就会由PIR触发。
单稳态反过来在由其RC定时组件决定的某个时刻激活电磁阀。
电磁阀的激活使其中心主轴在垂直方向上快速推拉,按压消毒剂瓶的泵手柄一次。
这最终导致瓶子将消毒液分配到用户手中。
一旦用户将手从系统中抽出,PIR 就会关闭,单稳态也会停用整个系统,直到另一个用户将手伸入 PIR 的范围内重复该过程。
所提出的自动洗手液分配单元的单稳态触发电路可以使用晶体管单稳态或通过流行的基于IC 555的单稳态电路进行设计。
我们将在以下讨论中讨论这两种变体:
晶体管洗手液分配器电路
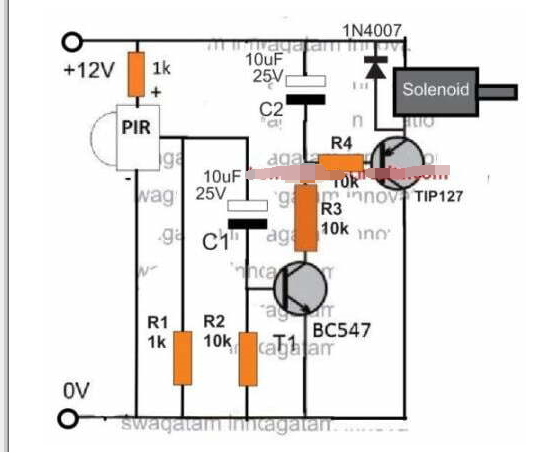
电路的晶体管版本看起来非常简单。当 PIR 设备检测到人为干预时,它会传导并通过 C1 将脉冲发送到 T1 的底部。
通过 C1 的电流立即激活 T1,T2 进而激活 T《》 和电磁泵。
同时,C1 快速充电并防止任何进一步的电流进入 T1 的基极,从而阻止来自 PIR
输出的重复直流脉冲。这可确保系统在每次检测中仅暂时工作,然后关闭,直到手被移开并启动新的循环。
T1/T2 的这种一次性激活可确保连接的电磁阀负载激活,以在其磁性主轴上产生单个推挽动作。
主轴操作消毒泵手柄,在用户手上分配单剂量的消毒液。
您可以注意到螺线管连接在晶体管的发射极侧,而不是常规集电极侧。发射极连接实际上确保电磁阀在响应 10uF 电容器 C2
的充电时通过温和的软启动推动激活。
如果它连接在集电极侧,将导致电磁阀被突然推力推动,这可能看起来不是很令人印象深刻。
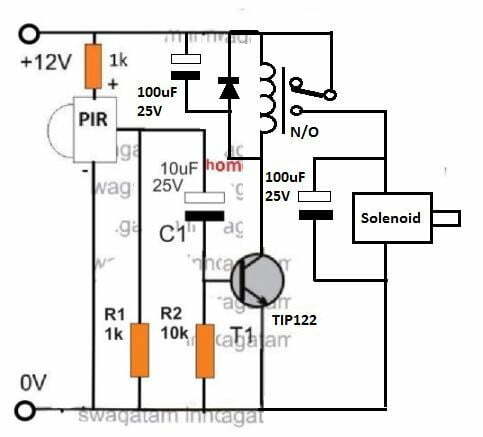
简化上述设计
上述晶体管无接触洗手液可以通过使用继电器进一步简化,如以下设计所示:
使用 IC 555
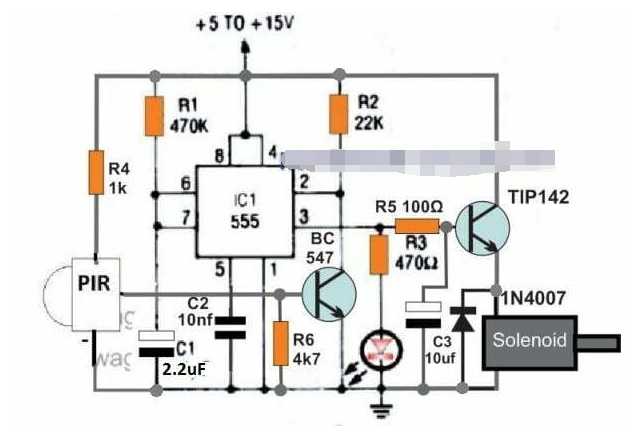
上图显示了一个标准的IC 555单稳态电路。此时,当引脚2接地时,会导致输出引脚3在由R1、C1值或其乘积决定的时间段内变为高电平。
在这种自动消毒器分配器设计中,R1,C1被计算为产生大约1秒的输出高电平,以响应引脚2上的低信号。
当 PIR 检测到人手时,它会导通并打开 BC547 晶体管,进而触发 IC 的引脚 2。
这会立即导致引脚 3 变为高电平并激活 TIP142 晶体管和连接的电磁阀,在电磁阀轴上产生 1
秒的长推力,然后关闭上拉。拉力是由电磁阀轴上附加的弹簧张力产生的。
同样,在这个版本中,还可以看到电磁阀连接在晶体管的发射极侧,以便根据C3的充电响应在电磁阀轴上实现柔和推力。
整个系统的动画视图可以在以下 GIF 图像中可视化。
红外反射传感器 TCRT5000
由于 PIR 是一种相对昂贵的传感器,因此制造自动洗手液的更便宜的替代方案可能是使用 IR 反射传感器 TCRT5000。
该传感器是红外光电二极管发射器和红外光电接收器并排包装在单个封装内的简单组合,如下所示:
该接近红外传感器模块的特性可以从以下数据中了解:
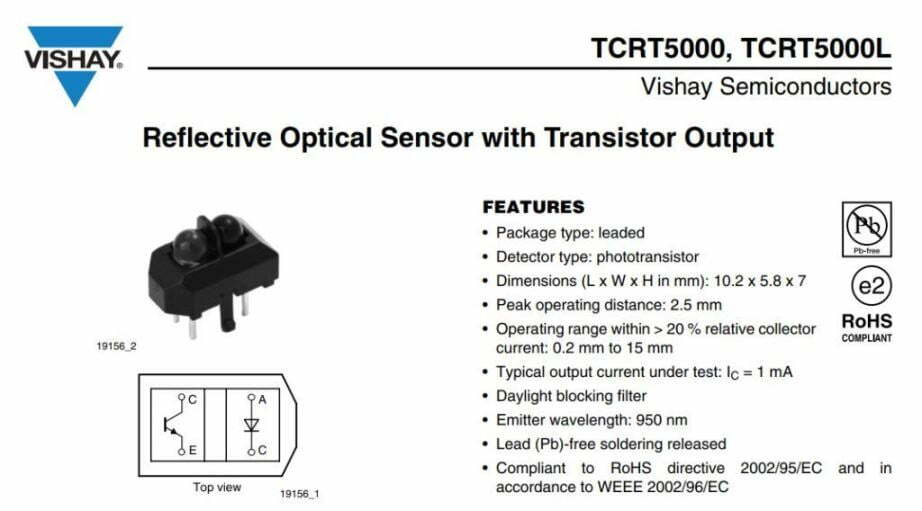
从传感器的内部布局图中,我们可以清楚地看到,该模块由一个向目标发射红外信号的光电二极管和一个相邻的光电晶体管接收器组成,该光电晶体管接收器的位置用于接收来自目标的反射红外信号。
为了在自动洗手液机中调整传感器,我们可以再次实现基于主力的IC 555单稳态,如下所示:
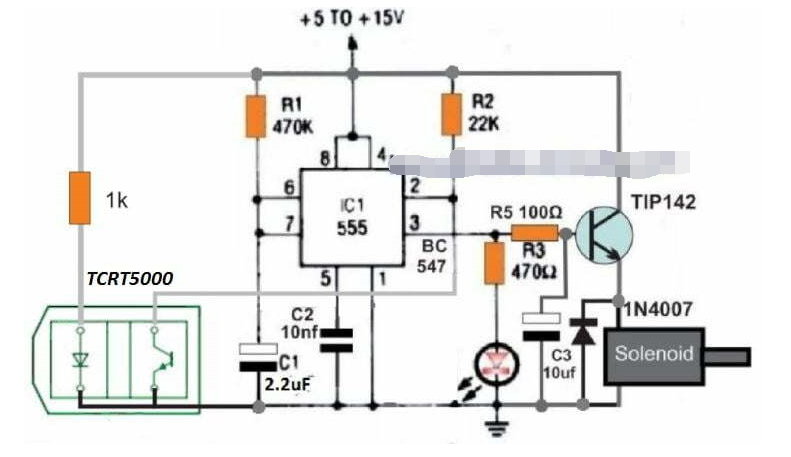
该电路是不言自明的,但是如果您在理解细节时遇到问题,您可以随时使用下面的评论框发起讨论。
使用 HC-SR04 和 IC555
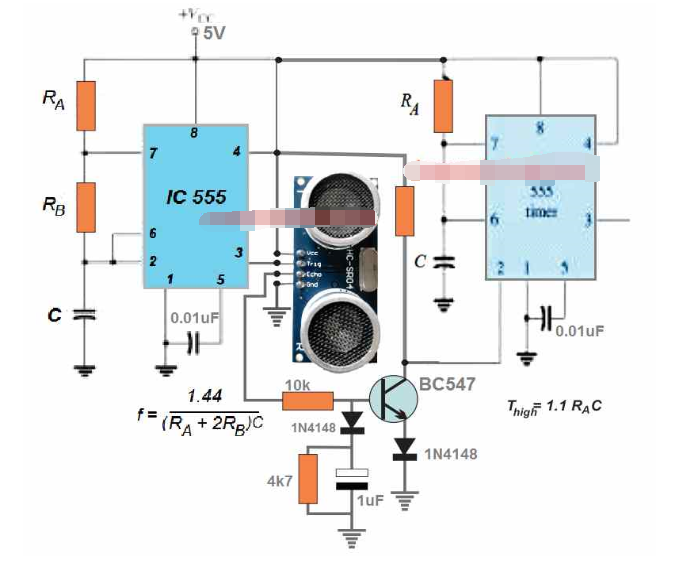
上面显示的电路可用于通过超声波接近检测器模块HC-SR04和几个IC 555电路实现自动消毒器分配器。
左侧IC 555配置为非稳态多谐振荡器,而右侧IC 555电路配置为单稳态多谐振荡器。
必须计算非稳态 RA、RB、C 分量值,才能从该 IC 的引脚 10 实现 60us 导通和 3us 关断 PWM。
必须调整单稳态的RA和C定时分量,以从该级的引脚1产生3秒高的单脉冲输出。
该输出可用于根据设计要求为点胶泵、电机、电磁阀等供电。
-
基于ATTiny13的自动洗手液分配器2022-06-20 1112
-
DIY一个自动洗手液分配器2022-06-21 1088
-
构建一个自动洗手液分配器2022-08-17 1537
-
自制一个洗手液分配器2022-07-08 3316
-
使用ATTiny13自动洗手液分配器2022-07-19 782
-
DIY自动洗手液分配器 无需Arduino或MCU2022-07-18 788
-
DIY洗手液/酒精分配器的PCB设计2022-07-27 2782
-
无需Arduino或MCU DIY自动洗手液分配器2022-07-28 714
-
构建一个带有LCD的自动洗手液分配器2022-08-16 2265
-
消毒洗手液分配器开源分享2022-11-09 710
-
免提洗手液分配器开源2022-11-28 626
-
免接触式洗手液分配器开源分享2022-11-30 764
-
易于构建的洗手液分配器 无需Arduino或MCU2022-12-15 832
-
基于Arduino UNO的洗手液自动分配器2022-12-19 801
-
自动洗手分配器开源设计2023-06-30 563
全部0条评论

快来发表一下你的评论吧 !
