

Kalman滤波通俗理解+实际应用
描述
01 Kalman用于解决什么的问题
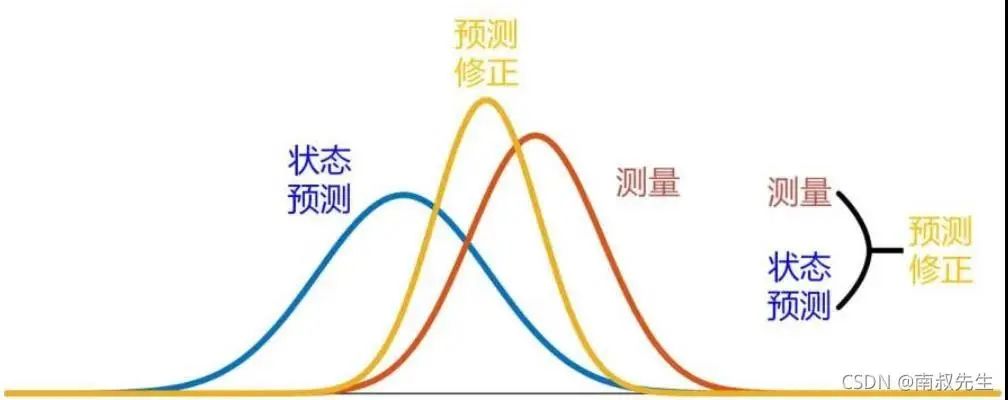
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
人话就是:线性数学模型算出预测值+传感测量值=更准确的测量值。
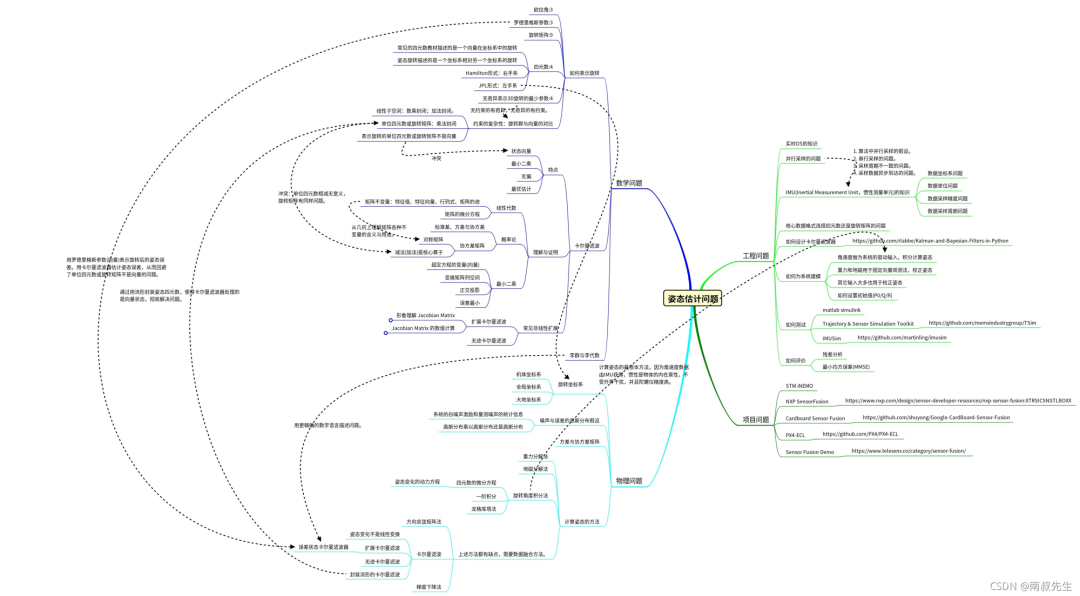
02 先来看一下姿态估计问题
03 看几个例子
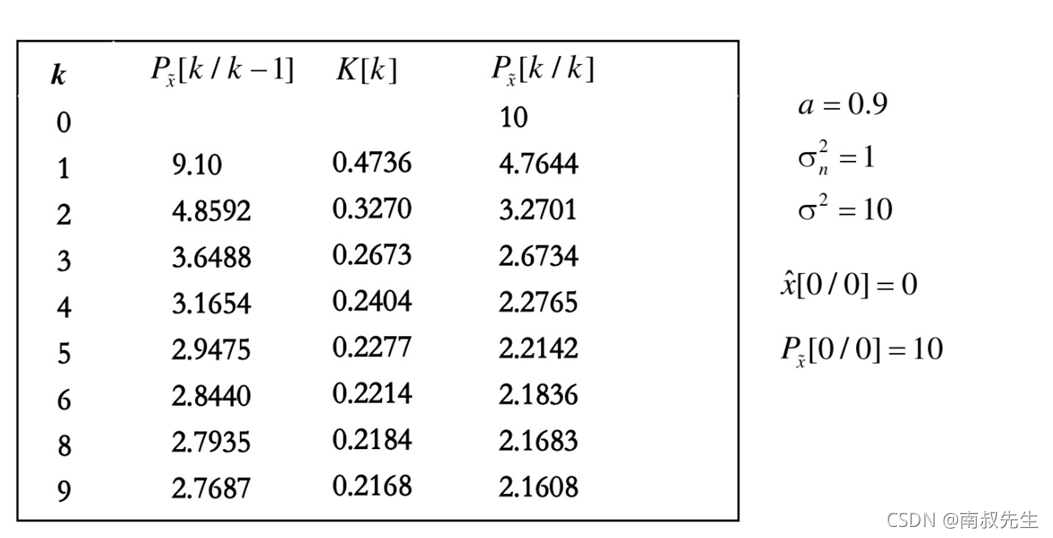
(1)例题1

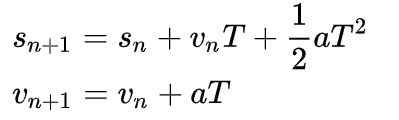
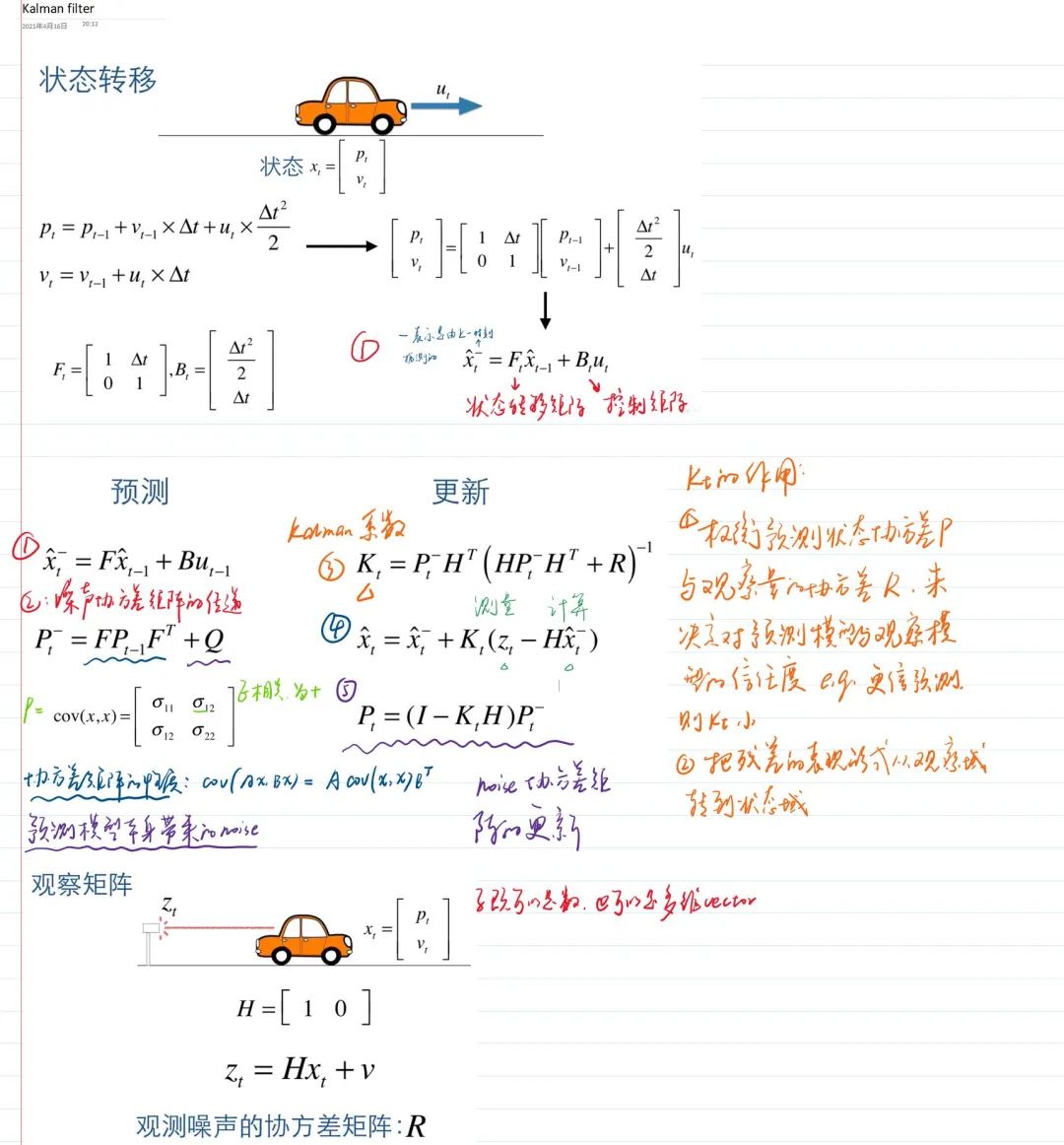
(2)例题2——运动模型,写出匀加速运动的状态转移方程
第一步,根据基本的物理运动方程,写出状态方程
第二步,写出观测方程模型
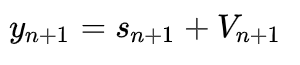
我开始也不明白这个观测方程是啥意思,实际上这是模拟传感器的测量值,S代表位移,V代表误差。这里代表目标测量量为位移。
第三步,将第一步和第二步的状态方程与观测方程写成矩阵形式
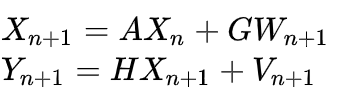
根据对应关系,可以得到系数:

其中A叫做状态转移矩阵,G叫做控制矩阵,H叫做预测矩阵
给定一个初值,就可以迭代得到后面的值了。
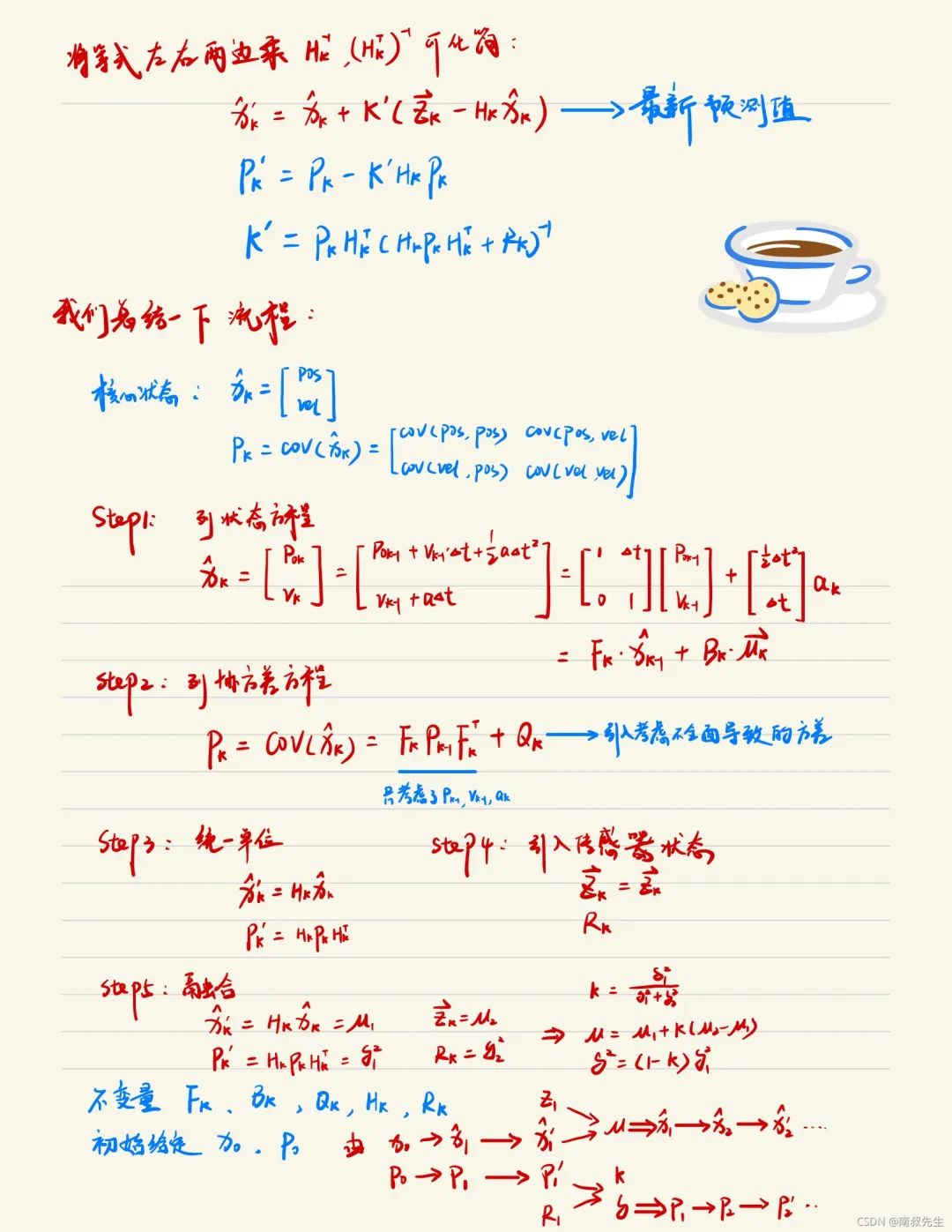
04 计算流程
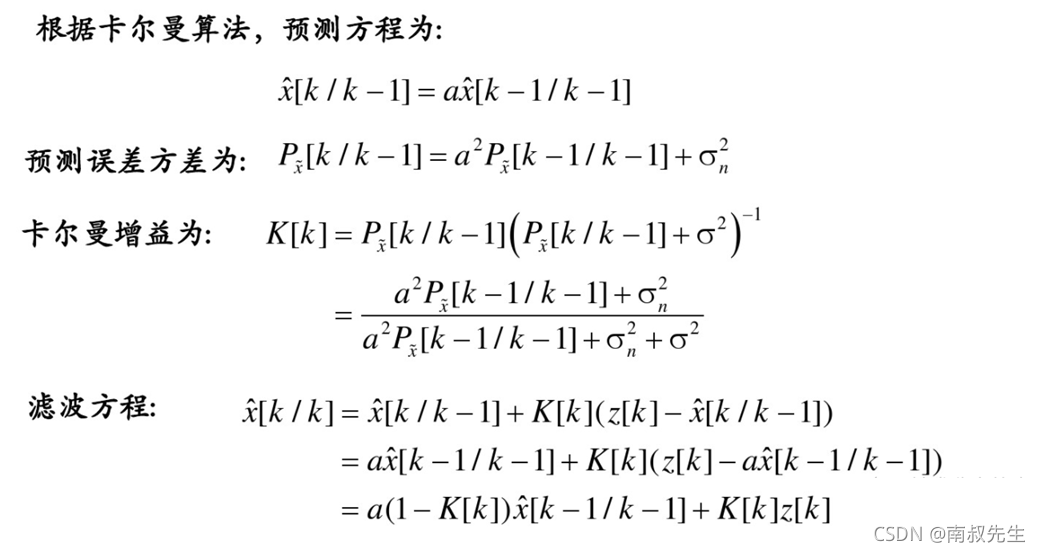
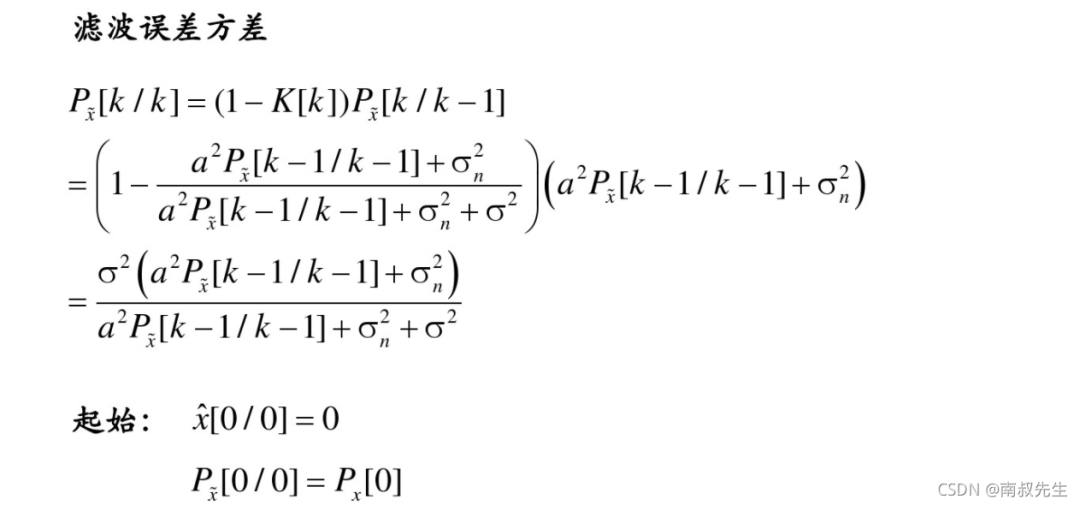
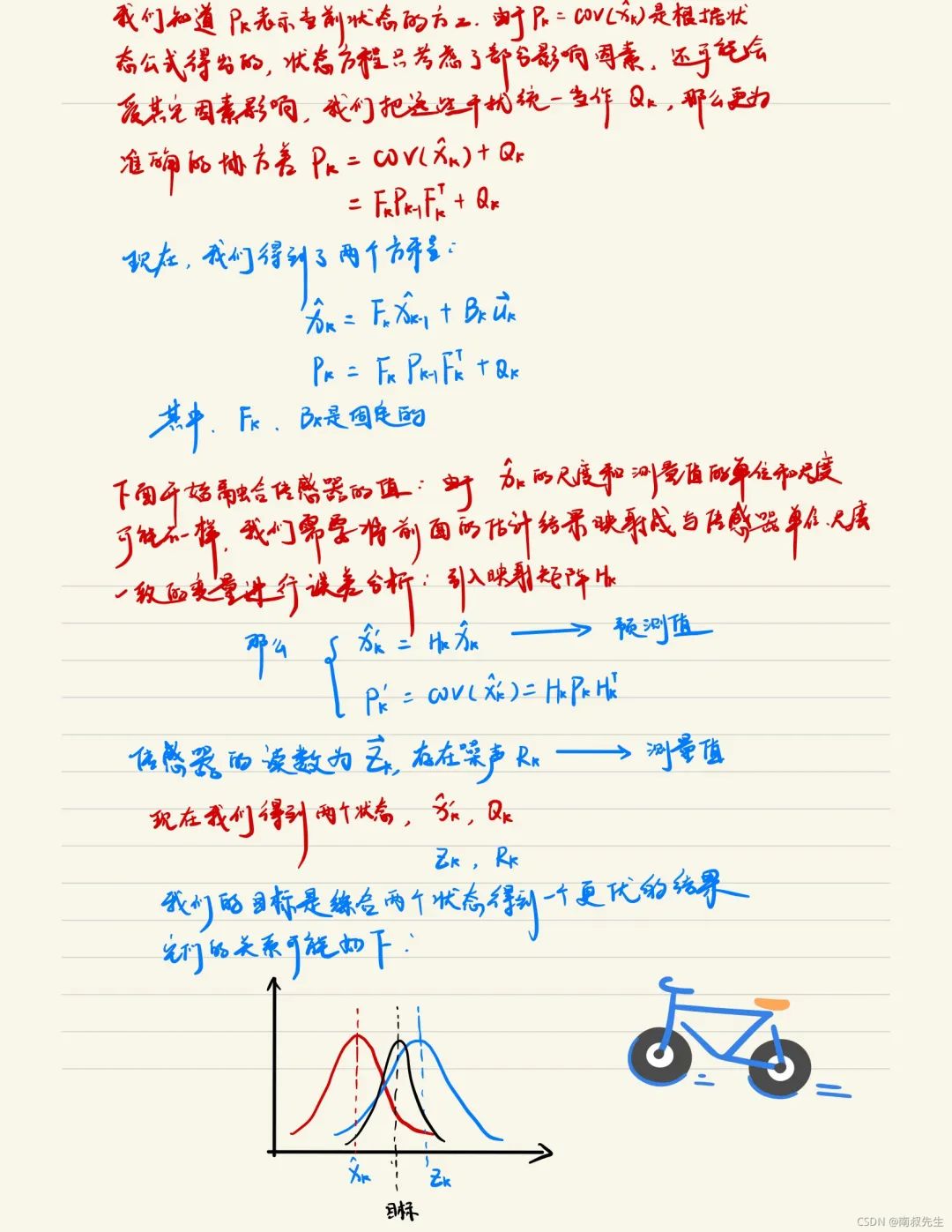
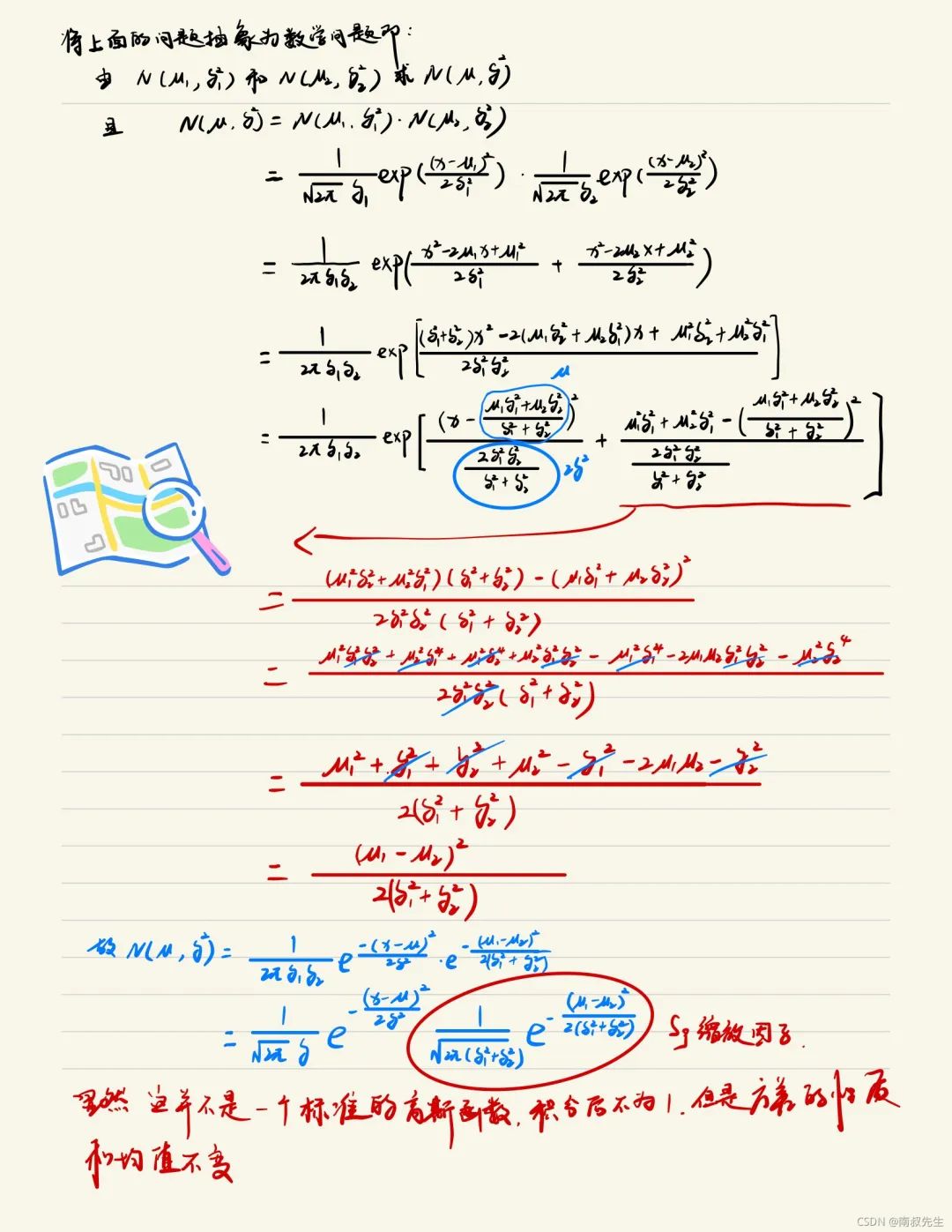
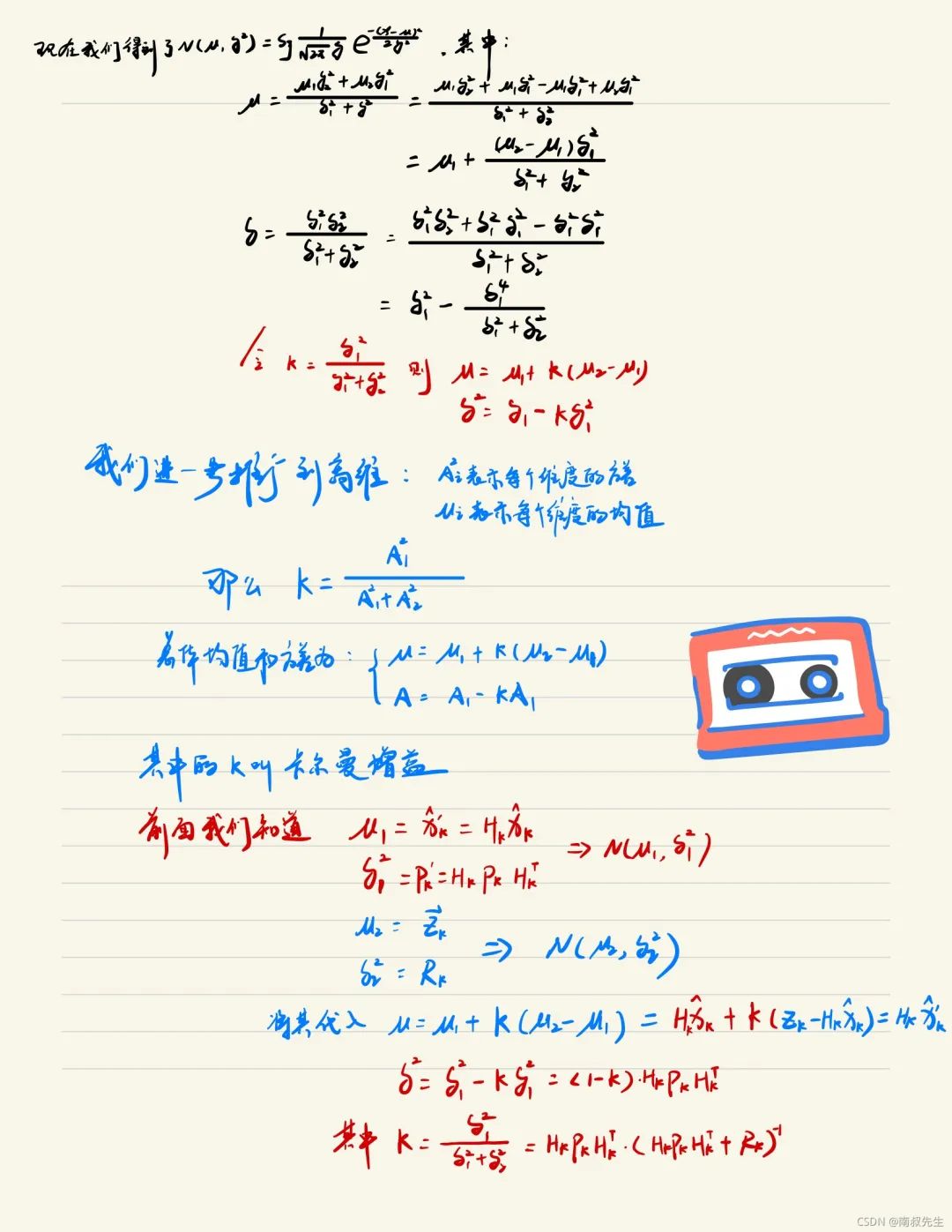
05 详细推导

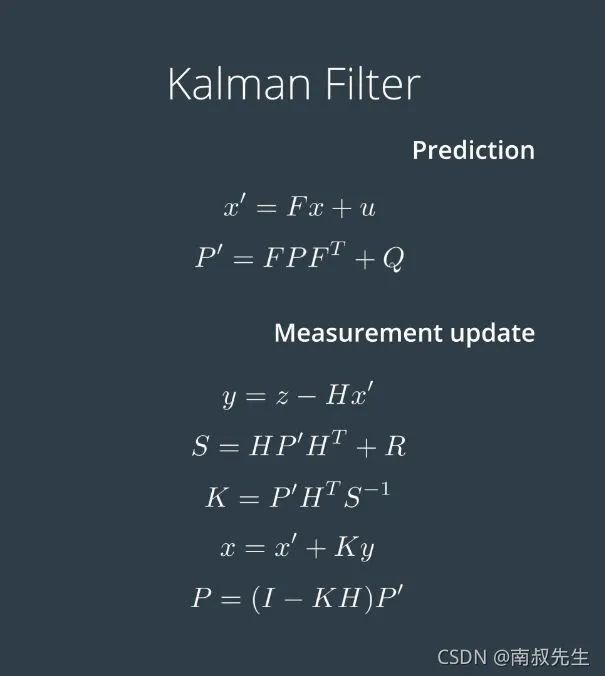
下图更简洁的展示了计算流程:
其中F为控制矩阵,Q为预测不确定性,R为传感器噪声,H为映射矩阵,y为误差,
S为方差之和,K为卡尔曼增益,P为更新后的协方差
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
详细阐述Kalman滤波模型2023-08-09 1934
-
PID控制算法通俗理解.pdf2021-12-21 1024
-
请问怎么通俗理解载波?2019-05-10 4697
-
基于改进Kalman滤波的可见光极小目标TBD跟踪方法_胡本川2017-01-08 927
-
基于多新息Kalman滤波的TLD改进算法2017-01-07 1148
-
在LabVIEW中怎么做基于Kalman滤波的背景更新算法啊2016-06-06 3349
-
PID调节的通俗化理解2016-03-16 983
-
kalman滤波算法交流qq群:243717290,欢迎大家加入~~~2012-06-12 3007
-
基于Kalman滤波的俯仰角速度估计2011-06-21 1084
-
Kalman滤波算法在加速度计自标定中的应用2011-04-12 1126
-
Kalman滤波在视频监控中的应用2010-05-05 949
-
FPGA的Kalman滤波器的设计2010-04-13 3721
-
基于Kalman滤波的多尺度融合估计新算法2009-06-22 910
全部0条评论

快来发表一下你的评论吧 !
