

基于S32K144实现TPS929120的基本控制功能
电子说
描述
1.TPS92910简介
TPS929120是TI公司在2019年4月份发布的具有FlexWire接口的12通道汽车级40V高边LED驱动芯片,其主要特点如下:
- 12路高边精确电流输出通道
- 供电电压4.5V到40V
- 电阻预设电流最高到75mA
- 2bit全局的,6bit独立的电流设置
- 输出电流在5mA到75mA时,精度可达±5%
- 输出电流在1mA时,精度为±10%
- 输出电流50mA时的压降为0.5V
- 12bit独立PWM调光
- 可编程的PWM频率最高可达20kHz
- 支持线性和指数两种调光方式
- FlexWire控制接口
- 最高1MHz的时钟频率
- FlexWire总线最多可挂16个器件
- 一帧命令最多可以传输8字节的寄存器数据
- 内部集成5V LDO可以给CAN收发器供电
- 诊断和保护功能
- 可编程的fail-safe状态
- LED开路检测
- LED短路检测
- 单颗LED短路诊断
- 可编程的欠压检测
- 开漏模式的ERR引脚,可以通知主机是否发生故障
- 用于判断FlexWire通信是否正常的看门狗和CRC校验
- 用于引脚电压测量的8bit的ADC
- 过温保护
2.硬件调试平台
笔者用来调试TPS929120所制作的DEMO板,整体框图如下:
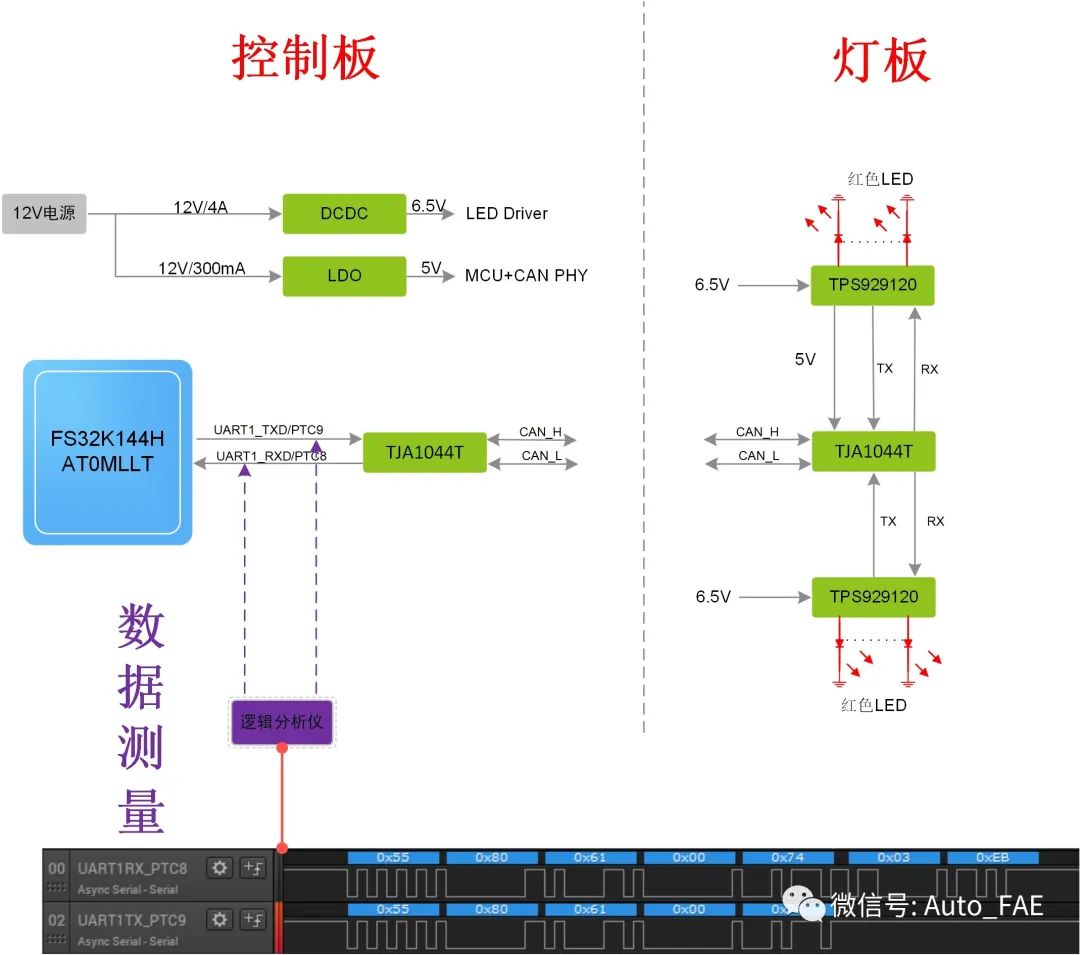
DEMO板分为驱动板和灯板两部分,接近客户的实际使用情况。其中,
- 驱动板上面主要是给灯板供电的DCDC,给S32K和TJA1044供电的LDO;
- 灯板上面主要是灯驱TPS929120和LED灯驱;
- 驱动板和灯板之间通过差分总线进行通信,抗干扰能力相比传统的I2C,SPI提高很多;
- 由于给灯板供电只有6.5V,所以TPS929120的整体功耗相比正常的12V供电系统能降低不少。
另外,该Demo板也预留了MCU的UART引脚作为测试点,方便查看S32K144和TPS929120的通信数据,从而在调试时更快地锁定问题。
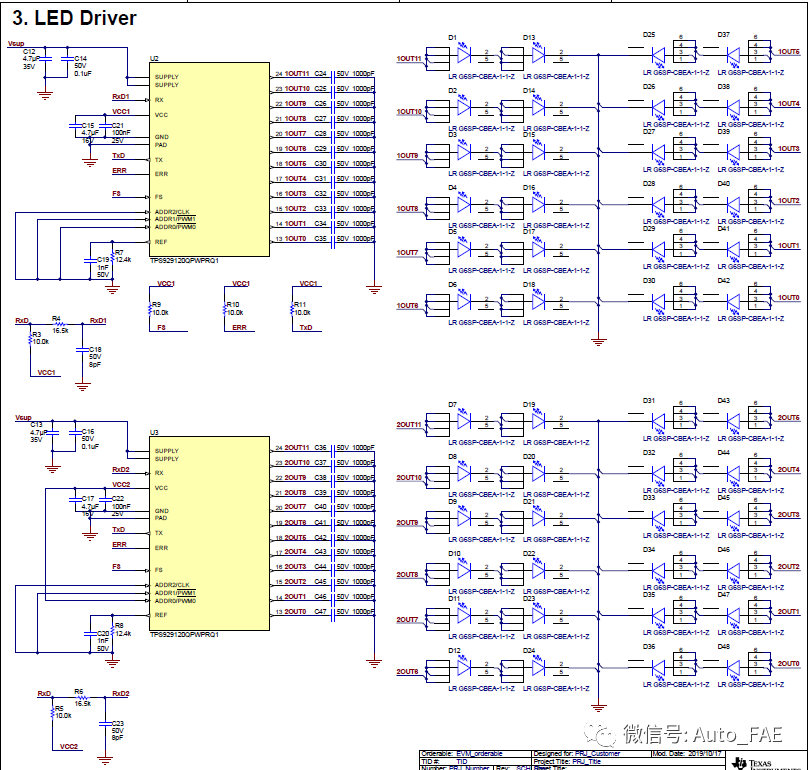
2.1 灯板原理图
灯板原理图参考如下官方demo板进行设计:
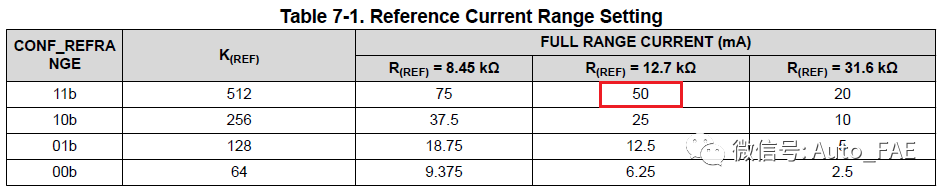
2.2 参考电流
参考电流计算公式如下,其中Vref为1.235V(数据手册典型值),Kref默认值为512(可以通过修改寄存器CONF_MISC1中的CONF_REFRANGE进行调整)。
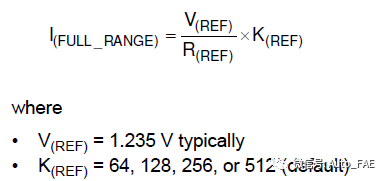
根据查表,此电路中TPS929120默认的参考电流为50mA(灯板上TPS929120贴的REF电阻为12.4K,计算值为51mA)。
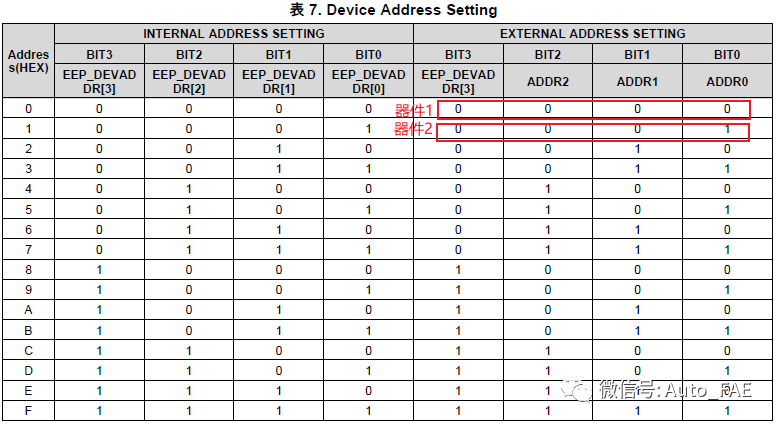
2.3 器件地址
TPS929120可以使用外部地址,也可以使用内部EEPROM预烧写的地址,此次DEMO使用外部地址。两片TPS929120的ADDR0,ADDR1,ADDR2引脚电压分别为000,100;根据下面的器件地址设置表格可以知道(EEP_DEVADDR[3:0]的默认值为0000b),两片TPS929120的地址分别为0和1。
3.TPS929120通信协议
TPS929120使用的通信方式,TI称之为FlexWire,其实就是UART(数据链路层)+CAN物理层,然后在传输层增加一些自定义的帧格式,目前其他厂家新出的多通道LED Driver基本都是采用这种通信方式。
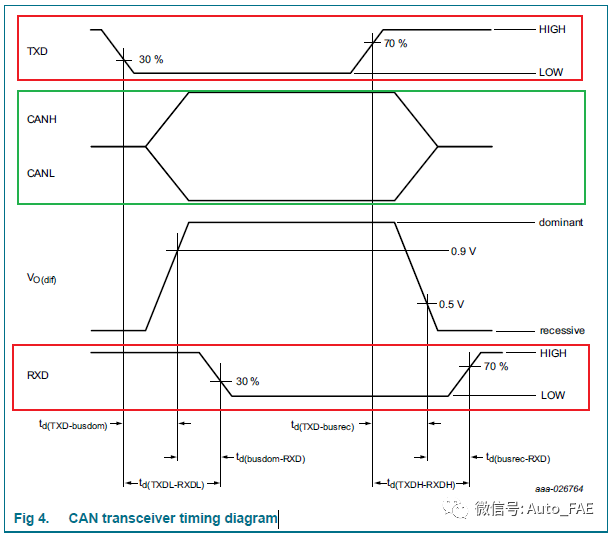
3.1 物理层
FlexWire的物理层使用CAN收发器,主要的作用就是将普通的串行信号转换成差分信号(时序图如下),比较常用的有TJA1044,TCAN1042等。
3.2 数据链路层
FlexWire的数据链路层使用的是UART通信,因为TPS929120内部的时钟最高为1MHz,为了通信稳定,所以MCU内部的UART配置的波特率为500K;其它配置为8bit数据位,无奇偶校验,1bit停止位。
3.3 传输层
2.3.1 读写时序
- 主机向TPS929120写数据:

- 主机从TPS929120读数据:


需要注意的是,如果加了CAN收发器,由于CAN收发器自带的回环功能,实际上主机也会收到他自身发的数据,所以实际主机收到的数据应该是 自身发的数据 + TPS929120响应的数据 。
当一次性写8个寄存器数据时,MCU的UART_RX收到的数据最多,为MCU发出的12字节+2字节
2.3.2 帧格式说明
- 总体格式如下:
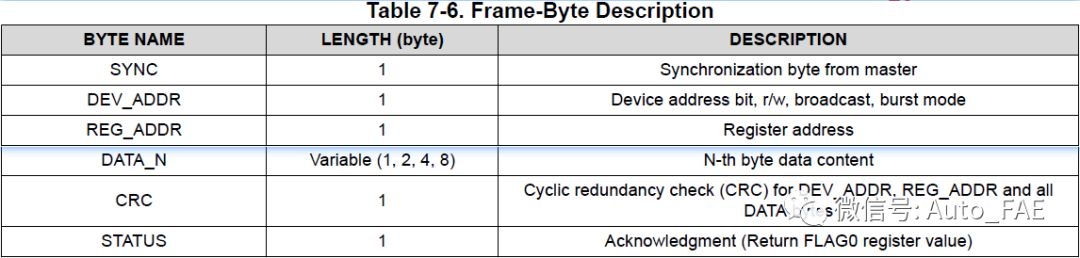
- 其中
DEV_ADDR的组成元素较多,如下所示,其他都是单一元素组成。

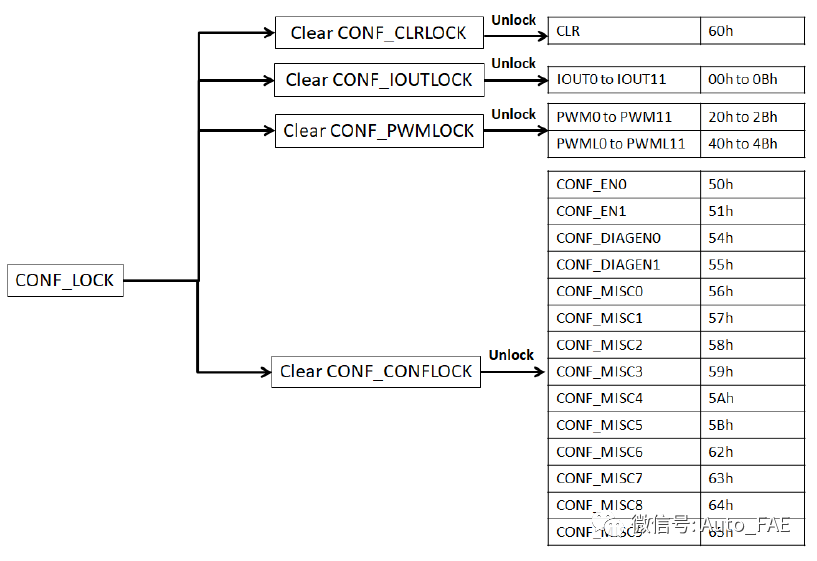
2.3.3 寄存器lock与unlock
配置其他寄存器之前需要先配置CONF_LOCK Register(61h)进行解锁,主要是如下四个4bit,这4个bit上电之后默认为1,处于lock状态,需要清0进行unlock。
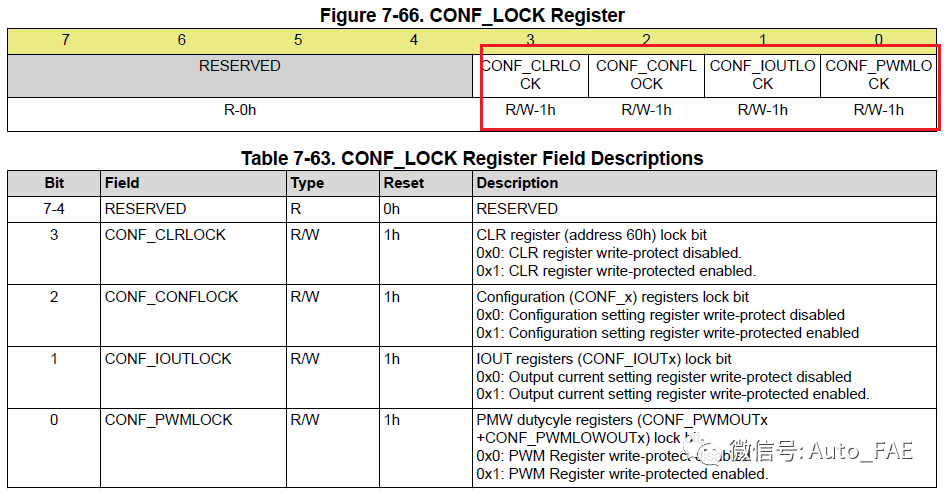
这4个bit分别能够lock与unlock的寄存器如下图:
2.3.4 输出通道控制
- CONF_EN0(50h),CONF_EN1(51h)分别控制通道0-7,8-11的使能;默认值为0h。
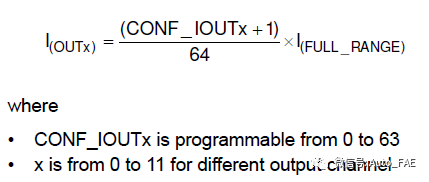
- IOUT0(00h)到IOUT11(0Bh)分别通道0到11的电流,一共64-step,实际的通道输出电流的计算公式如下,其中此电路板的I(FULL_RANGE)为50mA;这些寄存器在reset之后加载对应的EEPROM中EEPIx寄存器的值,EEPIx默认为3Fh。
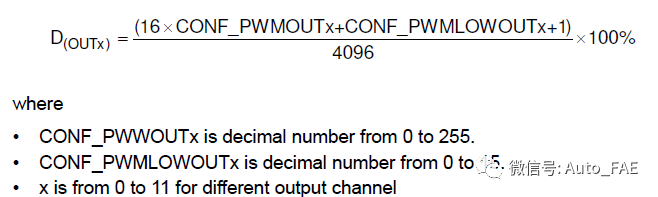
- PWM0(20h)到PWM11(2Bh),PMWL0(40h)到PWML11(4Bh)都是控制通道0到11的PWM占空比,前者用于粗调,后者用于微调,计算公式如下;前者在reset之后加载对应的EEPROM中EEPPx寄存器的值,为FFh,后者的默认值为Fh。
根据上面的分析,如果只配置通道使能,其他寄存器不设置,使能的通道会输出50mA的电流。
TPS929120在配置通道使能的情况下,即使配置PWM占空比为0,也会有微亮的情况。
4.使用S32K144驱动TPS92910
接下来,将基于S32K144介绍如何使用MCU驱动TPS929120,实现一些基本的灯光控制功能。
4.1 实现命令帧格式
4.1.1 写寄存器的帧格式
写寄存器的帧格式如2.3.2章节所述,先发SYNC(0x55),然后是DEV_ADDR(由4种元素组成),然后是REG_ADDR(数据手册中寄存器的地址),然后是DATA(要写入寄存器的数据),最后是CRC。
整体实现代码如下:
void FlexWrite(uint8_t DEV_ADDR_x, uint8_t registerAddr, uint8_t DATA_BYTES[], uint8_t DATA_LENGTH_x, uint16_t checkResponse)
{
uint8_t DEV_ADDR=0x00, REG_ADDR;
uint8_t commandFrame[12] = {0};// one longest command frame length is 12
uint8_t dataLength=0, frameLength=0, responseLength = 0;
uint16_t i;
DEV_ADDR = (FLEX_Write | DATA_LENGTH_x | DEV_ADDR_x);
REG_ADDR = registerAddr;
commandFrame[0] = 0x55; //SYNC byte
commandFrame[1] = DEV_ADDR;
commandFrame[2] = REG_ADDR;
switch (DATA_LENGTH_x)
{
case 0:
{
dataLength = 1;
break;
}
case 16:
{
dataLength = 2;
break;
}
case 32:
{
dataLength = 4;
break;
}
case 48:
{
dataLength = 8;
break;
}
default : break;
}
for(i=0;i
4.1.1 读寄存器的帧格式
读寄存器的帧格式和写寄存器的帧格式相近,这里就不赘述了。
4.2 实现Uart串口收发
硬件上使用LPUART1模块,引脚选择PTC8和PTC9,软件配置为波特率500K,8N1。同时,因为使用了CAN收发器,所以串口实际接收到的数据是发送的数据加上TPS929120响应的数据。
整体实现代码如下:
/*********************************************************************************************************
** Function name: uartWrite
** Descriptions: N/A
** input parameters: N/A
** output parameters: N/A
** Returned value: N/A
*********************************************************************************************************/
void uartWrite(uint8_t commandFrame[], uint16_t frameLength, uint16_t checkResponse, uint16_t responseLength)
{
uint8_t i =0;
/* Enable the receiver and receive data full interrupt of LPUART1*/
LPUART_DRV_ReceiveData(INST_LPUART1, responseData, 1u);
/* The function does not return until the transmit is complete or timeout(2ms) occured*/
LPUART_DRV_SendDataBlocking(INST_LPUART1, commandFrame, frameLength, 2);
if(checkResponse == TRUE)
{
/* launch timer and set wait time = 2000us
* This time should be larger than the time to receive all the response bytes,
* And the response receiving time depends on the buard rate and the number of response byte,
* For example, baurd rate = 500000, 2 response byte, so the wait time should be larger than 2*10*1/500000 = 40us
* Why 2*10 because for each byte there are additional 1 start bit and 1 stop bit
*/
timeOut(2000);
/* received all response byte or the wait time exceeds the specified time */
while(!((timeOutFlag == 1) || (receiveByteNum == responseLength)));
/*Take some action when successfully received response*/
if(receiveByteNum == responseLength)
{
/* Turn off Red LED and turn on Green LED*/
PINS_DRV_WritePin(LED_PORT, RED_LED, 1);
PINS_DRV_TogglePins(LED_PORT, 1<
4.3 实现基本的控制功能
4.3.1 操作TPS92910的基本函数
实现写寄存器的函数之后,就可以基于该函数实现一些基本的操作TPS929120函数了,主要是如下几个:
如下代码中包含了很多寄存器的宏定义,没有进行展开,读者可以借助数据手册进行对比。
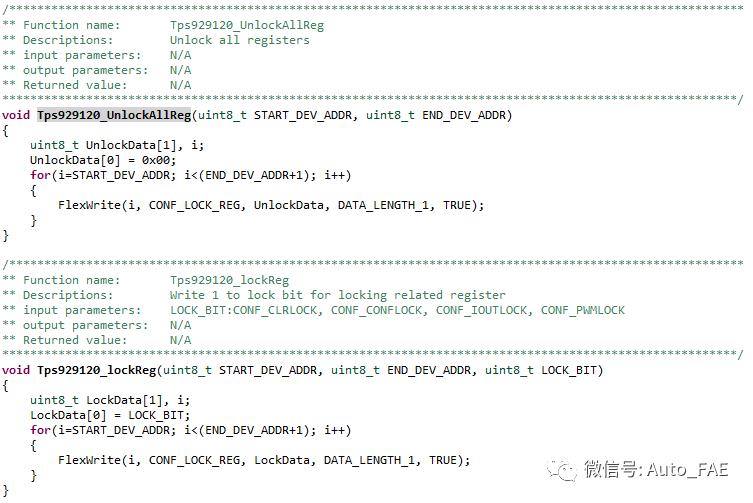
1.unlock与lock寄存器的函数实现如下:
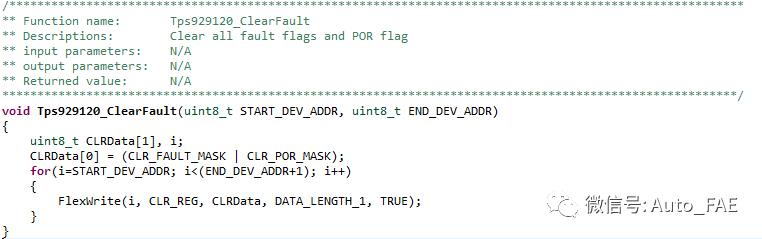
3.清除错误状态和标志的函数实现如下:
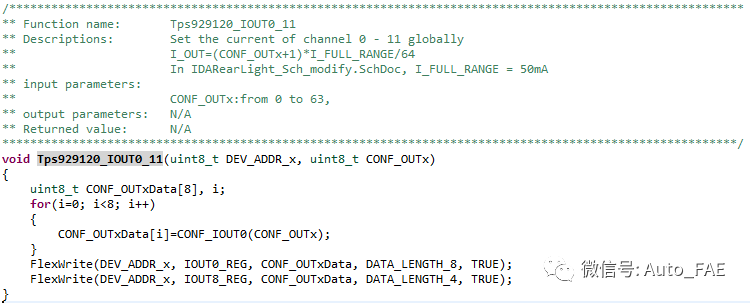
- 配置通道电流的函数实现如下:
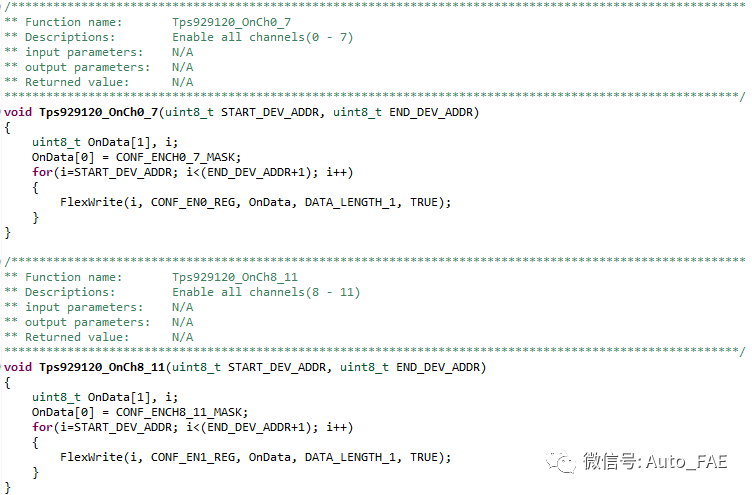
- 打开通道的函数实现如下:
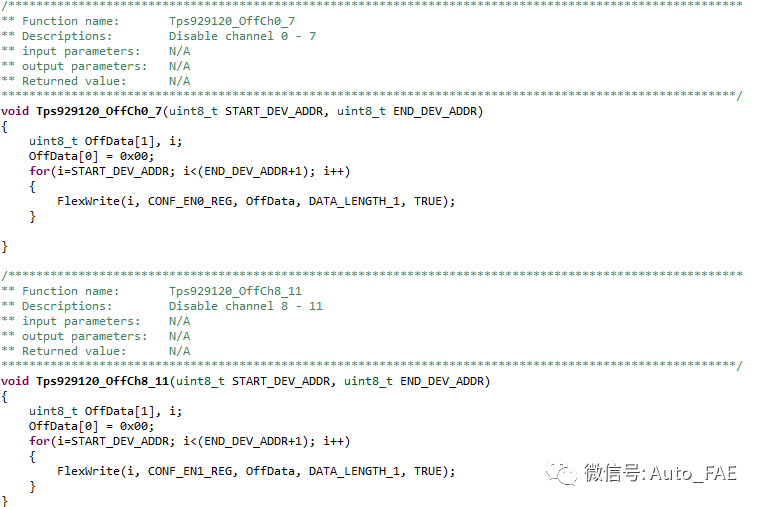
- 关闭通道的函数实现如下:
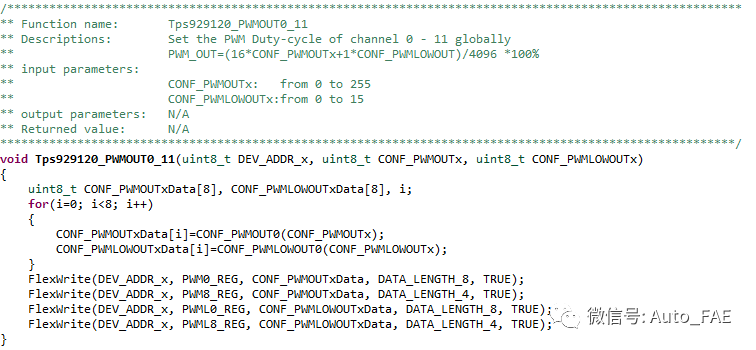
- 配置通道的PWM占空比的函数实现如下:
4.3.1 TPS929120控制流程
实现了上述基本控制函数之后,接下来就是控制TPS929120实现基本的灯效了。
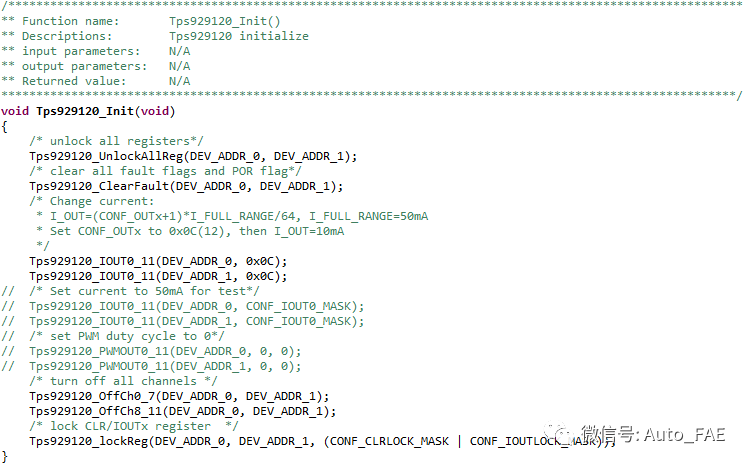
首先需要对TPS92910进行初始化,主要流程参考如下代码:
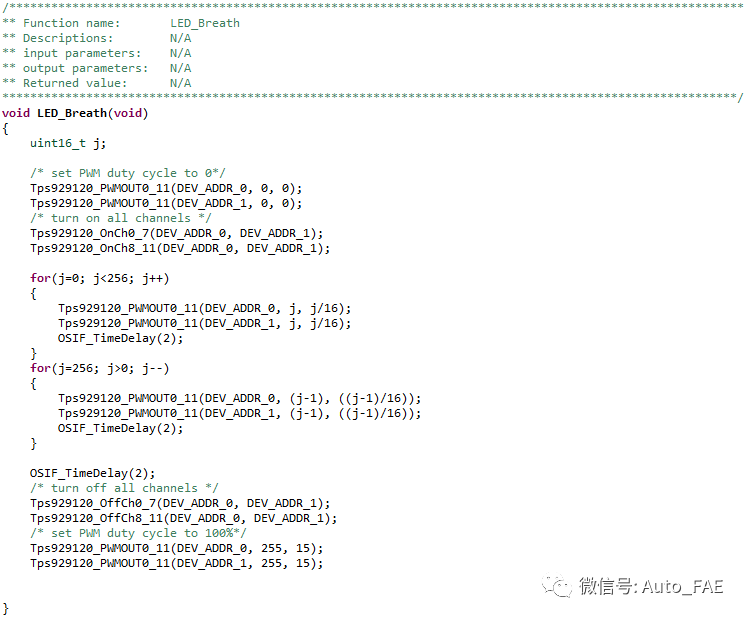
然后就是在主循环中实现灯效,这里以呼吸效果为例,代码如下:
下面代码在测试TPS92910竞品更改过,PWM占空比为0时仍有漏电流的问题被修复了。如果驱动TPS929120,建议在PWM占空比到0时,增加关闭通道的操作。
-
TPS929120的CRC校验的三种实现方法2023-05-30 2373
-
s32k144有哪些可用的诊断?2023-05-25 887
-
S32K144三相如何预充?2023-05-18 717
-
S32K144 CAN失败的原因?如何解决?2023-04-19 919
-
可以为S32K144配置电子邮件吗?2023-04-18 697
-
求分享S32k144 Modbus示例2023-04-04 742
-
S32K144解锁问题2023-04-01 894
-
无法将S32k144更改为48 针怎么解决?2023-03-31 836
-
启用S32K144上的Csec功能时问题求解2023-03-23 772
-
如何在S32DS3.5上使用Jlink对S32K144片上FLASH进行所有操作?2023-03-22 814
-
如何通过s32k144定时器从VLPS唤醒?2023-03-20 664
-
如何实现S32K144的中断接收?2022-02-07 2094
-
S32k144底层程序2018-01-23 11428
全部0条评论

快来发表一下你的评论吧 !
