

用于电机控制的空间矢量调制 (SVM)
电子说
描述
空间矢量调制 (SVM) 是感应电机和永磁同步电机 (PMSM) 磁场定向控制的常用方法。
空间矢量调制负责生成脉宽调制信号以控制逆变器的开关,由此产生所需的调制电压,以所需的速度或转矩驱动电机。
空间矢量调制也称为空间矢量脉宽调制 (SVPWM)。您可以使用 MATLAB® 和 Simulink® 来实现空间矢量调制方法,或利用预置 SVM 库来实现电机控制应用。
SVM 的目标
试考虑三相逆变器电机控制的空间矢量调制,该逆变器具有六个开关,如以下等效电路所示。注意,有八种有效的开关配置。
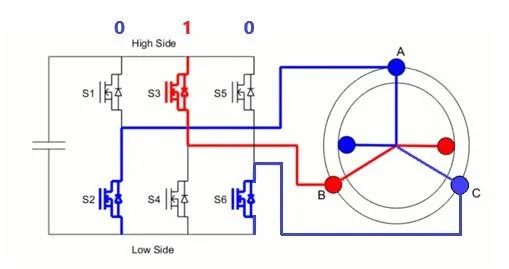
连接到电机定子绕组的三相逆变器电路。
** 开关 S2、S4、S6 分别与 S1、S3、S5 互补。*
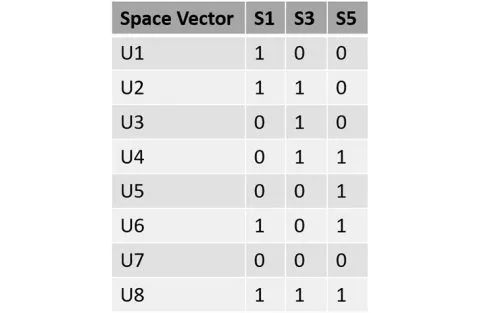
每种开关配置都会产生特定的电压,施加于电机端子。电压是基本空间矢量,以空间矢量六边形表示其幅值和方向。
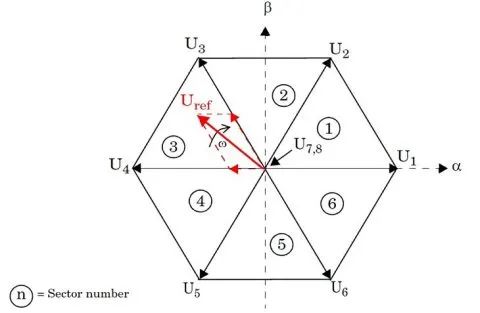
空间矢量六边形,包含基本矢量 U1-U8。
连接到电机定子绕组的三相逆变器电路。
通过对开关区间内的基本空间矢量(方向)和零矢量(幅值)作用时间进行调节,可以近似得到空间矢量六边形内任意位置、任意幅值的电压矢量。
例如图中,一个脉宽调制 (PWM) 周期内,选择两个相邻空间矢量(图中的 U3 和 U4)分别作用一段时间、在周期其余时间内由零矢量(U7 或 U8)作用,从而得到近似平均参考矢量 Uref。
通过控制开关序列,即控制脉冲的导通持续时间,就可以在每个 PWM 周期获得具有变化幅值和方向的任何电压矢量。
空间矢量调制方法的目标是在每个 PWM 周期生成与参考电压矢量相符的开关序列,以实现连续旋转的空间矢量。
,时长00:07
[ ]
旋转的参考空间矢量的示意图。
SVM 的操作
空间矢量调制方法基于参考电压矢量进行操作,在每个 PWM 周期为逆变器生成适当导通信号,目标是实现连续旋转的空间矢量。
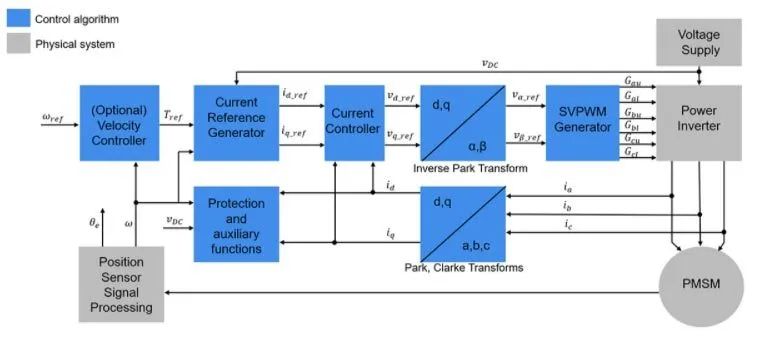
采用空间矢量调制的磁场定向控制架构示意图。
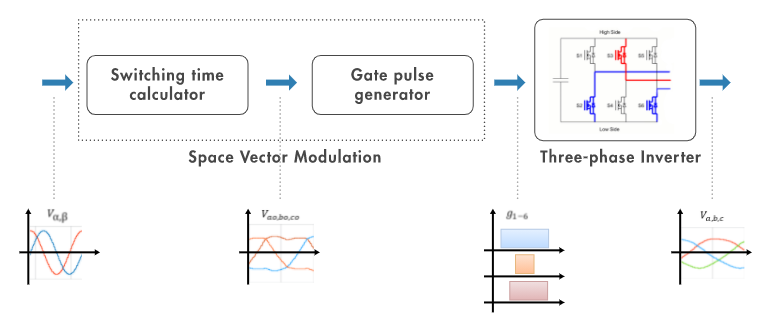
该模块图显示了一个空间矢量调制工作流示例。
在每个 PWM 周期,以电压矢量作为输入参考,SVM 算法会:
- 基于参考电压矢量计算开关导通时间
- 基于导通时间生成马鞍波
- 基于导通时间为逆变器开关生成适当的导通脉冲

SVM 算法生成的空间矢量调制电压信号。
所生成的马鞍波能够最大程度地利用直流总线电压。与正弦脉宽调制 (SPWM) 方法相比,该方法能提供更好的额定电压输出。
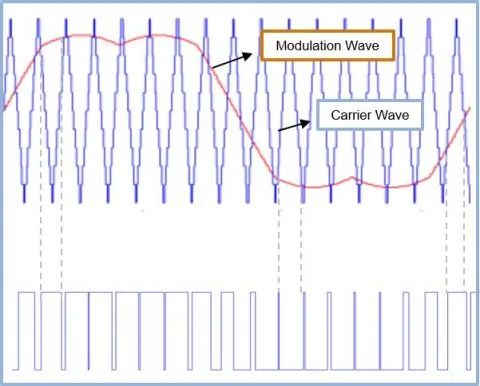
通过比较调制波(马鞍波)和载波生成导通脉冲。
然后,您可以将生成的导通信号应用于三相逆变器的开关,以所需的速度或转矩驱动电机。
PWM 硬件支持
硬件板卡(如 Arduino®、Raspberry Pi™ 和 TI 板)通过接收调制波形生成导通脉冲来驱动电力逆变器。
根据设计要求,采用 PWM 方法的电机控制算法通常需要以 kHz 级的较高频率执行。在耗费人力物力执行硬件测试之前,必须尽早评估控制架构的正确性。
为此,您可以使用仿真环境。例如,使用 Simulink,您可以基于电机模型来仿真和验证控制架构,包括空间矢量调制等脉宽调制方法,并尽早修正错误。
-
逆变器的调制方法进阶篇—空间矢量调制SVM2023-11-09 4540
-
用MCU轻松实现电机系统的空间矢量调制2017-02-08 2985
-
空间矢量脉宽调制技术2018-10-29 1817
-
基于DSP的空间矢量脉宽调制(SVPWM)的实现2010-03-01 675
-
基于空间矢量调制的PMSM直接转矩控制研究2015-12-18 1120
-
模糊PID控制和空间矢量调制的通用变频器设计2016-04-13 1049
-
电压空间矢量脉宽调制_SVPWM_控制2016-03-30 766
-
空间矢量脉宽调制(SVPWM)技术2017-02-10 10893
-
PSoC4平台实现空间矢量脉宽调制2017-09-15 1136
-
基于STM32的空间矢量脉宽调制在永磁同步电机中的应用2017-11-30 804
-
电机:空间矢量调制与交流感应电机的操作介绍2018-08-21 3913
-
空间矢量调制的介绍和基本原理资料概述2018-11-07 3604
-
Vienna整流器的空间矢量调制方式2023-04-14 5147
-
空间矢量调制技术(SVPWM)2023-05-29 7133
-
空间电压矢量控制模式和v/f有区别吗2024-10-12 3648
全部0条评论

快来发表一下你的评论吧 !
