

ADAS的种类与主要组成 LiDAR的用途与相关技术
汽车电子
描述
ADAS的种类与主要组成 什么是ADAS?从字面来看,ADAS就是Advanced Driver Assistance Systems的缩写,翻译成中文,就是先进驾驶辅助系统。既然ADAS是『辅助系统』,自然可知它与『自动驾驶』存有程度上的差异。但若换一个角度来看,ADAS系统的发展却也是我们迈向自动驾驶终极目标的必经之路。
从功能面来看,现今ADAS主要包括了:
自适应巡航控制系统(Adaptive Cruise Control, ACC):此功能是在传统定速巡航的基础上,采用雷达/光达探测前方车辆与本车的相对距离和相对速度,主动控制本车行驶速度,以达到自动跟车巡航的目的。根据前方是否有车辆,系统可以在定速巡航和跟车巡航之间自动切换。
车载导航系统(Car Navigation System):透过接收GPS (Global Positioning System)与TMC (Traffic Message Channel)的讯号,再加上安装在汽车上的地磁式方向传感器、陀螺传感器、车速传感器等用来测定汽车的行动轨迹,经过ECU运算,即能确认车辆在地球上的位置。
车道偏离警示系统(Lane Departure Warning System, LDWS):利用安装在前挡风玻璃上之摄影机,测量车辆前方的道路标线,并实时计算车辆与车道线的相对距离、道路斜率与曲率等参数,当驾驶者不经意偏离车道时,适时给予警讯,让驾驶者实时修正车辆行驶方向,甚至会主动尝试将车辆导回到原本的车道上,降低车祸发生的机率。
盲点侦测系统(Blind Spot Detection):典型的盲点侦测系统使用安装在汽车两侧的电子侦测装置(通常在左右后照镜周围或是后保险杆周围),透过电磁波/雷达波/超音波来感应,或是用摄影机拍摄画面。当其中一个传感器侦测到盲点区内有物体时,会透过灯光﹅声音或屏幕影像警告驾驶,避免贸然变换车道,造成事故。
前车防撞警示系统(Front Collision Avoidance System, FCWS):以镜头结合雷达侦测并利用特殊算法计算即将与前车碰撞的时间,若系统判断车距过近,本车与前方车辆未保持适当安全距离,与即将有碰撞风险时,系统透过警示灯闪烁,并发出警报音提醒驾驶人减速,以减少追撞意外对乘员的伤害。
行人侦测系统(Pedestrian Detection):以立体摄影机结合雷达侦测前方区块,掌握前方行人及其运动模式。当可能有碰撞风险时,系统会发出警示符号与警告音提醒驾驶人因应。若未能实时反应,更先进的系统将启动煞车辅助。甚至,若系统判断煞车过急,系统更将发出指令,束紧车内安全带、立直椅背以减低冲撞伤害。
此外,包括:紧急煞车系统﹅头灯自动启闭系统﹅自动停车辅助系统﹅夜视系统﹅侧风稳定系统﹅驾驶疲劳侦测系统…等,也都属于ADAS的范畴,在此不再一一赘述。
从系统架构面来看,ADAS主要由三大模块组成:传感器﹅处理器与制动器。 传感器(Sensor):用以侦测各种外界的讯号,如:超音波(Ultrasound)、雷达(Radar)、光达(LiDAR)﹅摄影机(Camera)等等,主要用于侦测距离的远近。其功能与应用可由图1一目了然。 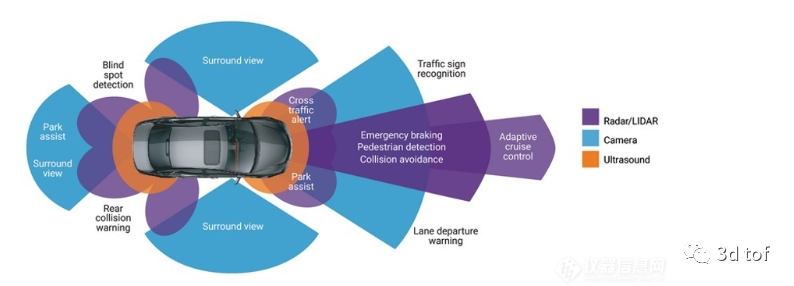 图1
图1
因应ADAS不同的功能需求而采用的感测技术总览 处理器(Processor):处理接收进来的讯号,在汽车里称为「电子控制单元 (Electronic Control Unit, ECU)」,做出适当的分类与处理,再向致动器输出控制讯号。常见如:微处理器(MPU)、数字信号处理器 (DSP)。
致动器(Actuator):控制各种致动的装置,依照处理器传送过来的控制讯号,让相关的装置完成运作。如:启动自动煞车使汽车停止前进、启动屏幕显示警告讯息、启动蜂鸣器发出警示音等。
LiDAR的用途与相关技术
LiDAR的英文全名为Light Detection And Ranging,中文称为『光达』或『激光雷达』。可应用于先进驾驶辅助系统(ADAS)的自适应巡航控制系统﹅紧急煞车系统﹅行人侦测系统与前车防撞警示系统等,其主要功能为精准测距。
光达基本是由雷射光源、光传感器和成像机构等3部分组成。雷射光源一般采用半导体雷射;光传感器一般是用光电二极管(Photodiode, PD)或雪崩光电二极管(Avalanche photodiode, APD);成像机构则分为扫描式或非扫描式的成像机构。在车用光达常用的距离量测方法就是利用飞行时间(Time of Flight, ToF)技术。关于ToF技术,将在本文下一个章节加以说明。
目前自驾车的发展,依据『是否采用LiDAR』的选择,分为两个门派:第一个派系是以特斯拉(Tesla)为首的阵营。此门派只以毫米波雷达与摄影机为主,不使用LiDAR。第二个门派则以Google为首。Google不只使用毫米波雷达与摄影机,更使用Velodyne H64E的光达,拍摄360度3D影像。
Tesla阵营决定不使用LiDAR的原因是其成本太过昂贵。然而,从近十年两个阵营累计的实际案例来看:Tesla自驾车发生了一些严重车祸案例;而Google自驾车在经历了超过300万英哩的实际测试后,仅发生十余起的轻微擦撞事故。另外,从功能面来看,光达可以提供0.1度角分辨率,100公尺测距和5~10Hz的画面更新率。这让世界各地许多从事自驾车发展的团队,普遍有一个共识,那就是:依现今自驾技术水准,未使用LiDAR作为传感器的自驾车,达到Level 2~3的标准没有问题;但若要达到Level 4~5,亦即达到『高度自驾』甚至是『完全自驾』的程度,就非使用LiDAR不可。 LiDAR对于自动驾驶的发展如此重要,这也促使产品必须朝向更低成本﹅更耐用与更安全的方向发展,具体项目如下:发展全固态LiDAR:当一个带有旋转扫描机构与驱动马达的模块,装置在需耐受天候并时常遭遇到震动与惯性变化的车辆时,此模块的耐用程度就会遭受到极大的挑战。所以将整个模块全固态化,免除旋转扫描机构与驱动马达,就能有效提升LiDAR的耐用度。
LiDAR对于自动驾驶的发展如此重要,这也促使产品必须朝向更低成本﹅更耐用与更安全的方向发展,具体项目如下:发展全固态LiDAR:当一个带有旋转扫描机构与驱动马达的模块,装置在需耐受天候并时常遭遇到震动与惯性变化的车辆时,此模块的耐用程度就会遭受到极大的挑战。所以将整个模块全固态化,免除旋转扫描机构与驱动马达,就能有效提升LiDAR的耐用度。
采用单光子雪崩二极管(Single Photon Avalanche Diode, SPAD)作为传感器:当单光子雪崩二极管传感器偏压超过崩溃区,其光子产生的电子受到高电场加速撞击,又产生许多电子,这些撞击产生电子又受到电场加速,又撞击产生更多的电子,这样的连锁雪崩效应所产生的电子增益非常大,所以只要有单光子就可以引发超过阈值(threshold)的电子讯号。SPAD造就了新款LiDAR对光线感知非常敏感的优点,也让LiDAR模块可以采用较低功率 & 较低成本的雷射光源。
改用更长波长的雷射光源:基于成本与功率考虑,目前多数LiDAR使用的雷射光源是905 nm雷射,但是905 nm波段不在人眼安全的波段范围内。一般人眼安全的波段是指大于1400 nm的波段,因为在可见光与波长小于1400 nm的红外光会聚焦在视网膜,容易对视网膜造成永久伤害。改用1400 nm以上的雷射作为光源,对人身健康安全才更有保障。
将LiDAR的发射器﹅接收器与扫描透过半导体制程整合到芯片上:将雷射与传感器一起长在芯片上,将可大幅度缩小体积﹅减轻重量,并符合LiDAR模块全固态化的要求。除此之外,芯片化的设计使其扫描速度比机械式扫描快了千倍以上,并能大幅降低成本,有效提升产品的性价比。
iToF 与 dToF 的差别 ToF是Time of Flight的缩写,也就是飞行时间。当我们得知光的飞行时间,将光速乘以飞行时间就可以计算出距离。例如:光飞行一年的距离称为一光年。 将ToF技术细分,可分为两种:(1) iToF (Indirect Time of Flight)间接飞行时间技术;(2) dToF (Direct Time of Flight)直接飞行时间技术。欲实现这两种技术都需要有发射端与接收端,其差别主要在于计算距离的公式不同。 iToF技术的发射端使用的是调制光,具备特定的周期与振幅。当这个特定调制的入射光从物体表面反射回来,接收器就会接收到相同周期的反射光,但这入射光与反射光两者之间存在着一个相位的延迟。当我们测得此相位差延迟了几个周期,就能透过下列公式计算出距离。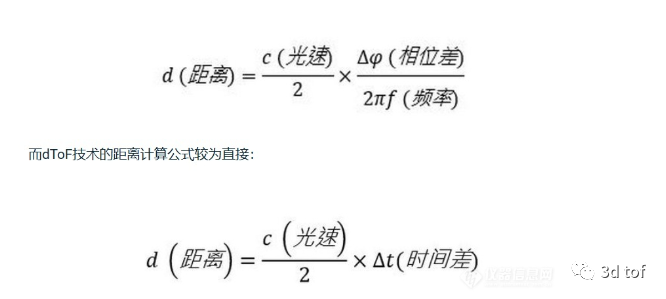 dToF的光源一般采用脉冲光(Pulsed Light),脉冲光指的是在一个极短时间内发出的光束,dToF的传感器在脉冲光发射出去的时候记录当下的时间,并与接收到反射光的时间计算出时间差(∆t),然后直接将时间差乘上光速除以2就计算出了物体与车子之间的距离。 那么,iToF与dToF各有什么优缺点呢?我们可以从下表的详细比较得知。不过,在此先下个小结论:短期而言,iToF技术挟着CMOS成本优势,应可占有一定的市场份额。但随着SPAD制程技术的持续演进,预期dToF技术的成本将可获得大幅改善。届时dToF技术在侦测距离的优势,将会占据更多市场份额与产品应用。
dToF的光源一般采用脉冲光(Pulsed Light),脉冲光指的是在一个极短时间内发出的光束,dToF的传感器在脉冲光发射出去的时候记录当下的时间,并与接收到反射光的时间计算出时间差(∆t),然后直接将时间差乘上光速除以2就计算出了物体与车子之间的距离。 那么,iToF与dToF各有什么优缺点呢?我们可以从下表的详细比较得知。不过,在此先下个小结论:短期而言,iToF技术挟着CMOS成本优势,应可占有一定的市场份额。但随着SPAD制程技术的持续演进,预期dToF技术的成本将可获得大幅改善。届时dToF技术在侦测距离的优势,将会占据更多市场份额与产品应用。 什么是SPAD?
什么是SPAD?
SPAD就是单光子雪崩二极管(Single Photon Avalanche Diode)的缩写,称为单光子累崩二极管,是一种半导体光侦测器。当我们在SPAD两端施加更高的反向偏置电压(硅材料通常为100-200 V),此时光子进入硅材料后,利用电离碰撞(雪崩击穿)的效应,可以获得大约100倍的内部电流增益,进而引发连锁倍增效应。这时候的电流就会非常大,能够很轻易的被电路侦测到。在制程上,透过掺杂技术的不同,可以让SPAD允许施加更高的电压而不会被击穿,从而获得更大的增益。一般来说,反向电压越高,增益越大。 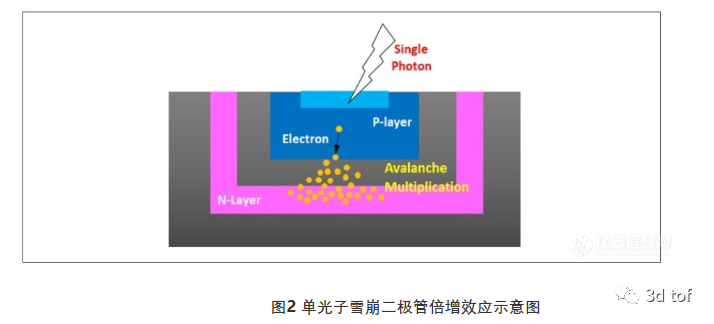 图2 单光子雪崩二极管倍增效应示意图
图2 单光子雪崩二极管倍增效应示意图
SPAD主要用于光达(LiDAR)和长距离光纤通信,此外,也开始被用于正电子断层摄影和粒子物理等领域。SPAD数组也已被商业化,比较知名的制造商包括:索尼(SONY)﹅意法半导体(STMicroelectronics)与安森美(ON Semiconductor)…等。
编辑:黄飞
-
ADAS系统组成简介#ADAS北汇信息POLELINK 2024-08-03
-
ADAS技术解决方案与应用对比2013-01-07 4429
-
ADAS功能开发的经验和技术难点2017-02-21 159350
-
ADAS关键技术及核心设计攻略,助你快速看懂ADAS系统2020-06-01 2900
-
实现“三重视野” – LiDAR技术实现安全驾驶2020-08-20 2595
-
ADAS研发与测试的模拟仿真技术2020-09-02 1866
-
现有的溯源跟踪技术主要有哪几种类型2021-07-22 1665
-
ADAS技术介绍2022-11-08 1045
-
自动巡航车LiDAR技术简介2019-05-11 1930
-
LeddarTech与COAST Autonomous将展出并演示LiDAR在ADAS和自动驾驶的应用2020-02-18 1327
-
LeddarTech和ST合作开发基于LeddarEngine技术的LiDAR解决方案2020-06-02 3041
-
计算机的组成、用途及主要分类2021-10-02 14266
-
IC芯片的常见种类及主要用途2022-01-18 21469
-
薄膜电容的种类和用途2023-11-03 9544
-
双绞线及连接件产品的种类和用途2025-02-26 2363
全部0条评论

快来发表一下你的评论吧 !
