

VW机器人关于RIP/HIP(水流量)的程序设置V5.4
机器人
描述
FB 156 FB_KühlwasserVW_02
该块用于控制介质,例如水监测器、压缩空气阀等。它监测流量,并在出现错误时向报警系统发出错误消息。
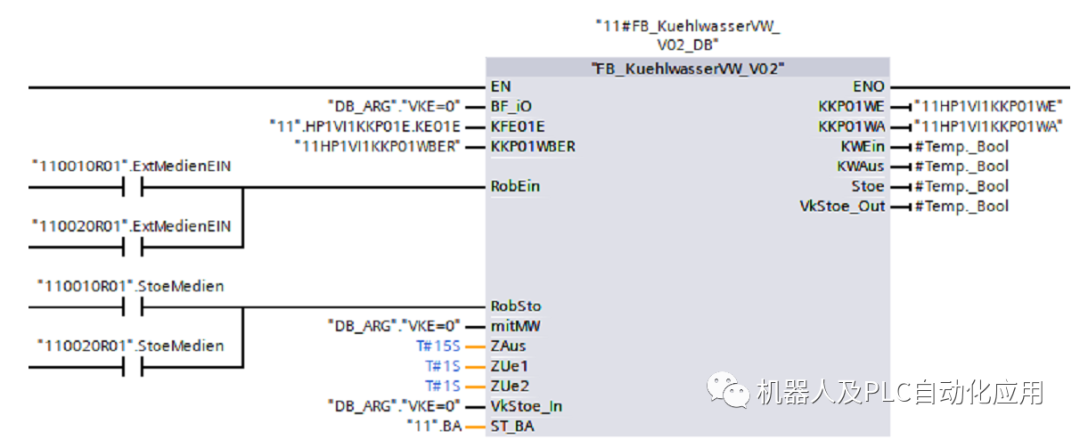
此块通常使用专用的实例数据块进行访问。
IN:
| BV_iO | BOOL | 流量切换点OK |
| KFE01E | BOOL | 打开阀门 |
| KKP01WBER | BOOL | 阀组准备就绪 |
| RobEin | BOOL | 通过机器人“打开”冷却水 |
| RobSto | BOOL | 机器人冷却水故障 |
| mitMW | BOOL | 带介质监测器和介质阀激活 |
| ZAus | BOOL | 时间值,冷却水关闭延迟 |
| ZUe1 | BOOL | 监测时间,“开”后流量正常 |
| ZUe2 | BOOL | 延迟时间,流速不正常 |
| VkStoe_In | BOOL | 链接的故障 |
OUT:
| KYP01WE | BOOL | 输出,冷却水阀打开 |
| KYP01WA | BOOL | 输出,冷却水阀关闭 |
| KWEin | BOOL | 冷却水开启 |
| KWAus | BOOL | 冷却水关闭 |
| Stoe | BOOL | 组故障 |
| VkStoe_Out | BOOL | 运行模式结构 |
工作原理
根据可视化要求或通过“RobEin”输入打开和关闭冷却水阀。后续时间由“ZAus”时间定义。在机器人冷却水故障“RobSto”的情况下,冷却水阀会立即关闭。将流量正常和不正常状态、选择、阀门驱动、介质监视器和组故障复制到OPC变量中进行可视化。
只能在配备大众RIP的机器人上进行更改!
“低压控制”(E516、E524、E532)必须集成到驾驶条件中。
VW_USER:
VW_USR_S.SRC
VW_USR_S.DAT
VW_UserApplikationVW_FEHLER
feh_usr_s.src
feh_usr_s.dat
VW_UserApplikationVW_WASSER
wass_usr_s.src
wass_usr_s.dat
VW_USER:
USER_S.KL
USER_XX_VR.KL
USER_FEH.KL
USER_WAS.KL
在Makro50中,必须通过调用标志来激活以下功能:
如果是具有冷却水功能的大众RIP:
F819 EIN-VW RIP,带水连接,可在宏50中激活
在没有冷却水功能的大众RIP的情况下:
F820、EIN、VW RIP在宏50中无需水连接即可激活
对于没有控制的大众RIP低压(BD01ND)
F817 EIN-VW RIP,无控制以激活宏50中的低压
E513 K1冷却水流量i.O。
E514 BV01WMIN#冷水最少。
E515 BV01WMAX#最大冷却水
E516 BD01ND#控制低压
A513 KYP01AE #循环水开
A515 KYP01AA #循环水关
F814=无控制RIP 3处的低压(BD03ND)
F815=无控制RIP 2处的低压(BD02ND)
F816=水流量故障
F817=无控制RIP 1处的低压(BD01ND)
F818 =ΔS点前的水
F819 =VW RIP,带水连接
F820 =VW RIP,无水连接
t54 RK100关闭时水开启的时间
t55 RK100开启时水开启的时间
t56 停止时间最大流量
如果水量正确,则输入(最小#冷却水=真)和(最大#冷却水=真)。
如果水流量过低,则输入(冷却水最小值=假),输入(冷却水量最大值=真)。
如果水流量过高,则输入(冷却水最小值=真),输入(冷却水量最大值=假)。
如果盖子破裂(最大流量),冷却水将在4秒钟后关闭。
-当防护格栅关闭时,在RIP上方
-当防护格栅通过HIP打开时,信号错误编号20(A225-A232媒体外部关闭)
此外,机器人输出A25(介质打开)被设置为FALSE。
当机器人超过15分钟时,通过HIP关闭水:
处于基本位置
在维修区域
处于释放保护栅的位置(访问请求)
保护栅打开
为此,将信号机械手输出A25(介质打开)设置为FALSE。
通过RIP额外的水切断维修位置/换帽
快换头
RIP上的紧急功能水开启
如果标志F819=ON和F820=ON为,则水阀将永久打开。
机器人RIP
范围:K1 - A/E513——520
A513 开水阀
A514 先导阀
A515 水阀关
A518 切丝阀动作
A520 清洗喷嘴
K2 - A/E521——528
K3 - A/E529——536
变量:F819:用来控制发出A25 机器人水流量正常
IF NOT MIT_VW_WASS AND ($FLAG[F_O_WASSER] OR OHNE_VW_WAS) AND NOT $FLAG[F_KWY01EIN] THEN不带水,有F820 或者 OHNE_VW_WAS ,没有F819 水阀启动
IF NOT $IN[I_BD01ND] OR (NOT $IN[I_BD02ND] AND $FLAG[F_MIT_RIP2]) OR (NOT $IN[I_BD03ND] AND $FLAG[F_MIT_RIP3]) THEN没有低压
$OUT[O_R_Med_ein]= FALSE没有A25
ELSE
$OUT[O_R_Med_ein]= TRUE有低压就有A25
ENDIF
IF ($OUT[O_R_PFO] AND $OUT[O_R_SAK]) THEN
OHNE_VW_WAS=FALSE
ELSE
OHNE_VW_WAS=TRUE
ENDIF
ENDIF
$FLAG[F_O_WASSER] :F820 不带水
MIT_VW_WASS:带水控制单元
$IN[I_BD01ND]:E516 有控制低压
$IN[I_BD02ND]:E524 有控制低压
$FLAG[F_MIT_RIP2]:F142 带第2个RIP
$OUT[O_R_PFO]:A15原位
$OUT[O_R_SAK]:A16在轨迹上
* 在不需要水的机器人没有使用F819而是使用F820,当E516压力满足时发出A25
/////////////
当使用 F819时 MIT_VW_WASS(水控制单元)将被激活, 控制A513 开水,或A515关水。
IF $OUT[O_R_RK100] AND NOT WASSERSTOE AND NOT WASSER_EIN AND NOT $FLAG[281] AND NOT $FLAG[283] THEN
开水条件1:A10机器人启动,没有水流量故障,水还没启动,没有F281和F283(关水F量)
或者F819和F820都有,没有水故障也可开水。
F820 不带水控制单元
WASSER_EIN:水启动
SWITCH WA_ZUSTAND
CASE 1 开水
;Wasser EIN
$OUT[O_KYP01WA]=FALSE
$OUT[O_KYP01WE]=TRUE
$OUT[O_KYP02WA]=FALSE
$OUT[O_KYP02WE]=TRUE
$OUT[O_KYP03WA]=FALSE
$OUT[O_KYP03WE]=TRUE
WASSER_EIN=TRUE
;$TIMER_STOP[T_WASSER_EIN]=FALSE
CASE 2 关水
;Wasser AUS
$OUT[O_KYP01WA]=TRUE
$OUT[O_KYP01WE]=FALSE
$OUT[O_KYP02WA]=TRUE
$OUT[O_KYP02WE]=FALSE
$OUT[O_KYP03WA]=TRUE
$OUT[O_KYP03WE]=FALSE
WASSER_EIN=FALSE
WASSERSTOE:水故障
IF ($IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]) OR ($IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]) OR ($IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]) THEN
;Auswertung Fehler maximaler Fluss in welcher RIP
W_MAX_RIP1=$IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]
W_MAX_RIP2=$IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]
W_MAX_RIP3=$IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]
$TIMER_STOP[T_WASSER_STO]=FALSE
水压检测不能没有高压水路。
IF ($TIMER[T_WASSER_STO]>WA_STOER_Z) THEN 水故障超时T25〉4000
WASSERSTOE=TRUE
$FLAG[F_T_WA_WSTOE]=TRUE 水故障
$TIMER_STOP[T_WASSER_STO]=TRUE
$OUT[O_KYP01WA]=TRUE 关闭水
$OUT[O_KYP01WE]=FALSE
$OUT[O_KYP02WA]=TRUE
$OUT[O_KYP02WE]=FALSE
$OUT[O_KYP03WA]=TRUE
$OUT[O_KYP03WE]=FALSE
编辑:黄飞
-
安装进水和出水流量计的选择2023-11-15 1806
-
怎样去设计一个基于单片机的水流量系统2022-02-18 1313
-
基于单片机的水流量系统2021-12-23 1304
-
如何实现污水流量检测系统的设计?2021-11-11 1315
-
基于51单片机的水流量计流量报警器设计2021-11-10 2441
-
污水流量计的选型_污水流量计安装规范2020-11-25 3069
-
关于机器人水流量控制与监控的高级设置2020-05-10 5349
-
关于水流量传感器不能应用于气体计量的原因2020-02-29 2322
-
水流量传感器(霍尔)的工作原理2019-12-13 19804
-
水流量计选型_水流量计的种类2019-11-28 7033
-
水流量传感器的工作原理2018-11-01 4314
-
水流量传感器的应用2018-10-29 2484
-
水流量传感器的选型要点2018-08-31 3306
-
智能家居系统中的水流量计设计2012-07-31 5064
全部0条评论

快来发表一下你的评论吧 !
