

STM32CubeMx计数器基本使用方法
控制/MCU
1933人已加入
描述
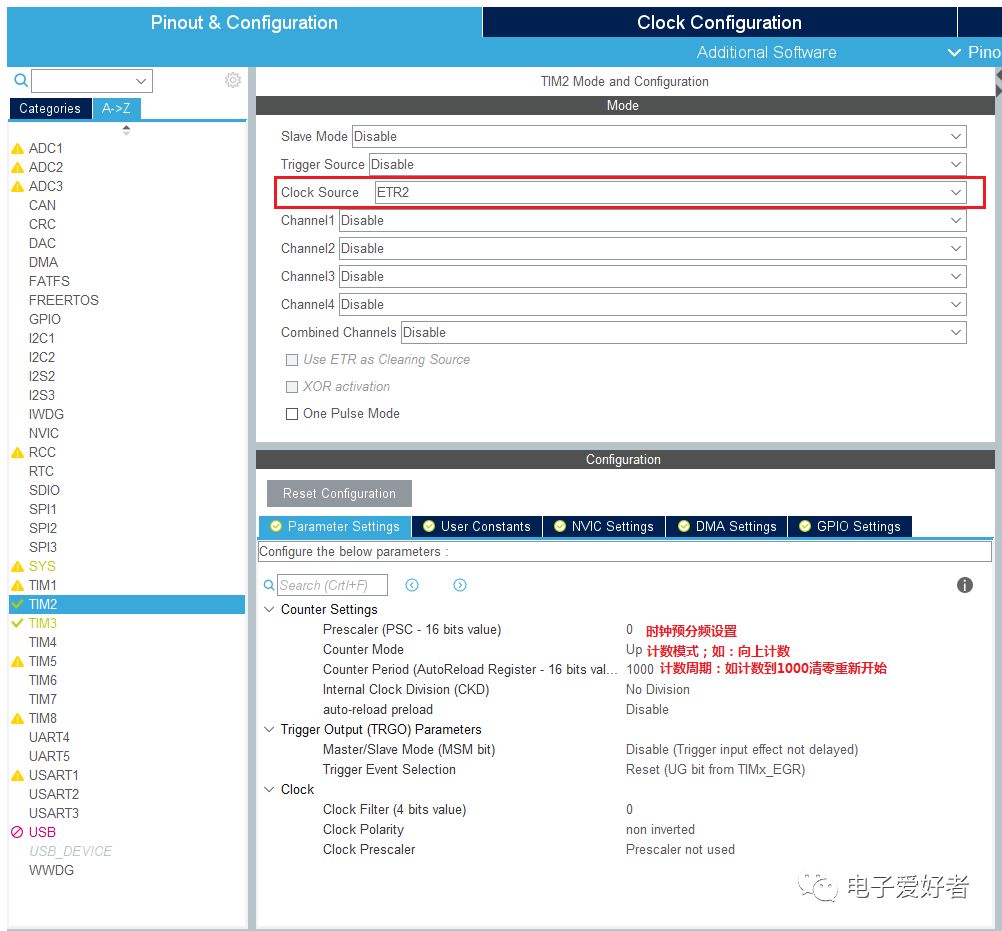
第一步:
具体配置如下图:
第二步:
可以根据自身需要在NVIC 中断控制器中配置中断响应优先级。这里的配置方法可以参考前面几章!
第三步:
代码分析:
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_ETRMODE2;
sClockSourceConfig.ClockPolarity = TIM_CLOCKPOLARITY_NONINVERTED;
sClockSourceConfig.ClockPrescaler = TIM_CLOCKPRESCALER_DIV1;
sClockSourceConfig.ClockFilter = 0;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
//在这这里添加这行代码,意思是初始化完成便开启计数器
HAL_TIM_Base_Start(&htim2);
/* USER CODE END TIM2_Init 2 */
}
//主函数里面调用计数值
while (1)
{
ETR_Count = __HAL_TIM_GET_COUNTER(&htim2);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 控制器
- 计数器
- 中断
- NVIC
- stm32cubemx
-
STM32CubeMX介绍及使用方法2023-09-27 806
-
STM32CubeMX简介和安装使用方法2023-06-07 21927
-
STM32CubeMx基本使用方法2023-05-31 5072
-
Keil STM32CubeMX资料包2023-03-27 953
-
STM32CubeMX的使用方法是什么2022-02-10 814
-
STM32CubeMX的HAL库对F103和F411的GPIO配置和使用方法2022-01-26 1183
-
STM32CubeMX 窗口及工具介绍2021-12-14 1243
-
STM32CubeMX 实战教程:看门狗实验(LL 库)2021-12-05 1413
-
STM32CubeMX应用教程 第一章 GPIO2021-12-02 1106
-
浅谈stm32cubemx安装教程2020-03-25 21183
-
STM32CubeMX新建工程的过程及方法解析2018-11-27 7749
-
stm32cubemx教程2015-11-02 1851
全部0条评论

快来发表一下你的评论吧 !
