

浅析电子电气架构发展的六阶段
汽车电子
描述
关于汽车电子电气架构演进,行业内讨论最多的是博世提出的电子电气架构发展六阶段,如图所示。博世将整车EEA 划分为六个阶段:模块化(Modular)、集成化(Integration)、域集中(Domain Centralization)、域融合(Domain Fusion)、整车中央计算平台(Vehicle Computer)、车-云计算(Vehicle Cloud Computing)阶段。该演进概念清晰指明了未来汽车电子电气架构算力会逐渐集中化,最终会发展到云端计算。当前主流架构处于功能域控制器集中阶段,正在朝多域控制器融合架构方向发展。
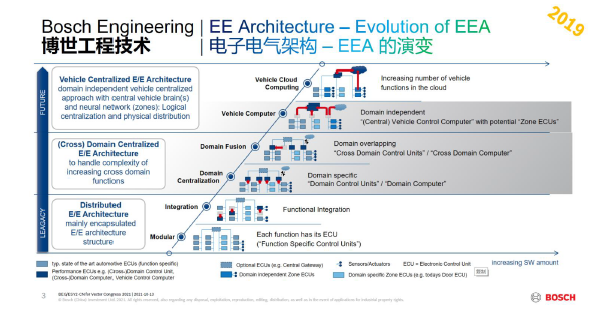
博世EEA 发展六阶段 安波福提出智能电气架构(SVC),采用中央计算机及带有标准化接口和互联网安全网关,统一供电和数据主干网,通过双环拓扑结构实现冗余网络。而动力数据中心(PDC)可以为周围的电子系统分配电源,收集并分发大量原始传感器数据到中央计算机,在中央计算机中对它们进行处理以实现自动驾驶命令。
区域控制器为传感器提供接口,管理电源,并提供区域算力。作为中央计算平台的开放式服务器平台可动态分配算力资源,保证汽车即使在关键部位发生故障的情况下也能安全行驶,从而保证汽车的安全冗余。 为了适应市场对电动化的需求,实现从分布式向集中式电子电气架构转变。国内外整车企业已开始建立适合未来的车辆电子电气架构和汽车软件架构,使其可以在不同的车辆计划、开发单位和组织之间进行协调,从而提高开发的灵活性和创新性,减少开发时间与风险。
国外整车企业如特斯拉和大众已实现整车集成至4 个主控ECU,实现整车域控制器软件开发,实现软硬件解耦设计,并多次通过OTA 升级整车功能。 特斯拉Model S、Model X 再到Model 3 /Y 的电子电气架构演变,推动力是商业模式及技术路径的变革,充分体现了软件定义车辆的技术创新。
特斯拉Model 3 ECU 图示 目前最有名的是特斯拉Model 3 采用的架构,如上图。Model 3 车载中央电脑和区域控制器架构,采用Autopilot(自动驾驶)+IVI(信息娱乐系统)+T-BOX(远程信息处理器)三合一计算平台,将三块控制板集成到同一壳体中,新引入BCM-F/L/R 三个区域控制器,实现ECU 整合并对执行器供电。彻底抛弃了功能域的概念,实现集中式电子电气架构和区域控制器方案,通过中央计算模块(CCM)对不同的区域ECU 及其部件进行统一管理,并通过CAN((控制器局域网))进行通信,并实现了高度集成,高度模块化,对传统汽车电子架构进行了全方位的创新,实现了“软件定义汽车”,加快了汽车产品迭代速度。实现了算力集中化、服务附加值提升、内部拓扑结构简化。特斯拉的准中央计算EEA 已带来了线束革命,Model S/Model X 整车线束的长度是3 公里,Model 3 整车线束的长度缩短到了1.5 公里,ModelY 进一步缩短到1 公里左右。
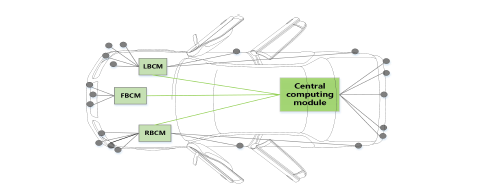
特斯拉的集中控制功能集成在三个域控制器中,中央计算模块直接整合了智能驾驶与信息娱乐域控制模块,以及外部连接和车内通信系统域功能,架构方案较之前车型简化,即: AICM(智能驾驶与信息娱乐域控制模块):连接各类自动驾驶传感器,综合执行逻辑计算功能,以及完成人机交互; FBCM(前车身控制模块)/智能配电模块:负责12V 的电池、电源分配和热管理的功能; LBCM(左车身控制模块)和RBCM(右车身控制模块):分别负责剩下的车身与便利系统、底盘与安全系统和部分动力系统的功能。
德国曼恩商用车(MAN)的中央计算式电子电气架构,以集中化为特征,采用了一个中央控制单元,部署了所有与策略相关的功能,因此车辆的ECU 也相应地减少。剩余的ECU也不再包含任何策略相关功能,因此新功能的集成发生在功能架构级别,不影响ECU 和CAN通信。另外该EEA 引入了标准化的I/O 模块,如果车辆新增功能,仅需安装附加的I/O 模块以及相关的执行器和ECU。这也为将来的车辆功能和系统提供了良好的可扩展性,并使该架构与时俱进。
大众为了适应市场对电动化的需求,推出了MEB 平台,实现从分布式向域融合电子电气架构转变。MEB 电子电气架构分为整车控制器(ICAS1)、智能驾驶(ICAS2)和智能座舱(ICAS3)三大域控制器。ICAS1 实现整车所有控制类功能集成,如高压能量管理、低压电源管理、扭矩控制、车身电子控制、网关、存储等功能;另外ICAS1 连接诊断接口和T-BOX,实现信息安全设计,并作为OTA 主控ECU 实现整车并行刷写。
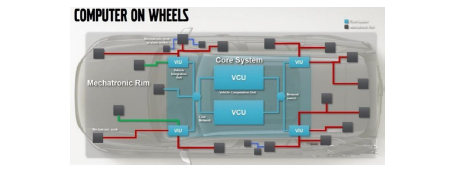
ICAS2 作为智能驾驶运算中心,通过以太网接收ICAS1 的雷达和摄像头信息,实现运算处理,并实现对于制动和转向系统的请求。ICAS3 采用一机多屏控制方式,通过以太网接收ICAS1 和ICAS2 的需求。另外大众推出自身VW.OS,并采用Adaptive AUTOSAR(又称AUTOSAR AP,AUTOSAR 自适应平台)和SOA 实现不同应用的集成。 沃尔沃的区域电子电气架构包括Core System(核心系统)和Mechatronic Rim(机电区域),如下图所示。沃尔沃的VIU(Vehicle Integration Unit,整车集成单元)对应不同整车区域的感知、控制与执行。沃尔沃的VCU(Vehicle Computation Unit,整车计算单元/整车控制器)对应车载中央计算机,提供整车智能化所需的算力与数据存储。
沃尔沃EEA 架构示意图 奥迪将采取中央集群计算方案(Central Computing Cluster )。如下图所示,整车划分为:驱动域、能源域、横纵向控制域、驾驶辅助域、座舱域、车身舒适域、信息安全域;不同的域之间通过高速以太网来进行信息交互,域内采用CANLIN 等进行实时低速通信;新架构分为传感器与执行器层和承载不同功能的域层;车辆的中央计算单元会与企业的后台相连接,奥迪的后台会与HERE 后台相连,接进行数据共享。
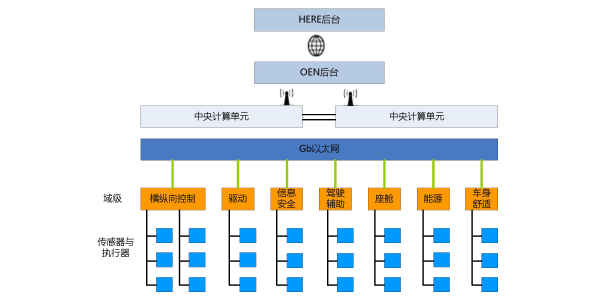
奥迪EEA 架构示意图
编辑:黄飞
-
汽车电子电气架构为什么要做中央集成?2023-08-18 1741
-
智能汽车电子电气架构发展史2023-07-20 2519
-
浅谈电子电气架构的发展史2023-07-15 2265
-
整车电子电气架构中的智能执行器2023-03-27 1413
-
浅析整车电子电气架构中的智能执行器2023-03-13 1770
-
介绍汽车电子电气架构的演变和发展2022-10-24 5487
-
如何学习电子电路基础2021-09-25 2331
-
如何去搭建汽车电子电气架构2021-08-26 2891
-
想做六阶带通式小箱体可好?2016-12-18 8427
-
汽车电子电气架构设计及优化措施2016-10-18 5505
-
六阶梯波原理是什么呢?2016-04-26 7867
-
[分享]充电机六阶段充电过程列举2008-10-15 5867
全部0条评论

快来发表一下你的评论吧 !
