

高伸缩性、高灵敏度应变传感器实现人体关节的运动捕捉
MEMS/传感技术
描述
用于人体动作捕捉的可穿戴传感器为遥操作场景中的机器人控制提供了一种有前途的人机接口,机器人可以作为人类操作员的第二身体来远程准确地完成任务。
据麦姆斯咨询报道,近日,浙江大学杨赓研究员课题组设计了一种基于软质聚氨酯(PU)海绵和碳纳米管(CNT)的新型应变传感器,用于人体关节的运动捕捉。PU-CNT海绵独特的三维(3D)多孔微结构为传感器提供了高灵敏度。为了弥补这种应变传感器在高灵敏度和高伸缩性之间的互相制约,提出了一种优化几何参数的菱形网格结构,结合预压缩设计,用于应变传感器的原型设计,这使得传感器在拉伸过程中具有额外的伸长率。所提出的PU-CNT应变传感器具有良好的传感性能,可拉伸性高达300%,最大应变系数为3893,同时具有长期耐用性,低检测极限和快速响应能力。最后,研究人员通过将应变传感器部署在人体肘部来实现机械臂的遥操作,并通过机器人的数字孪生模型对其进行实时监控,从而对应变传感器进行了验证。
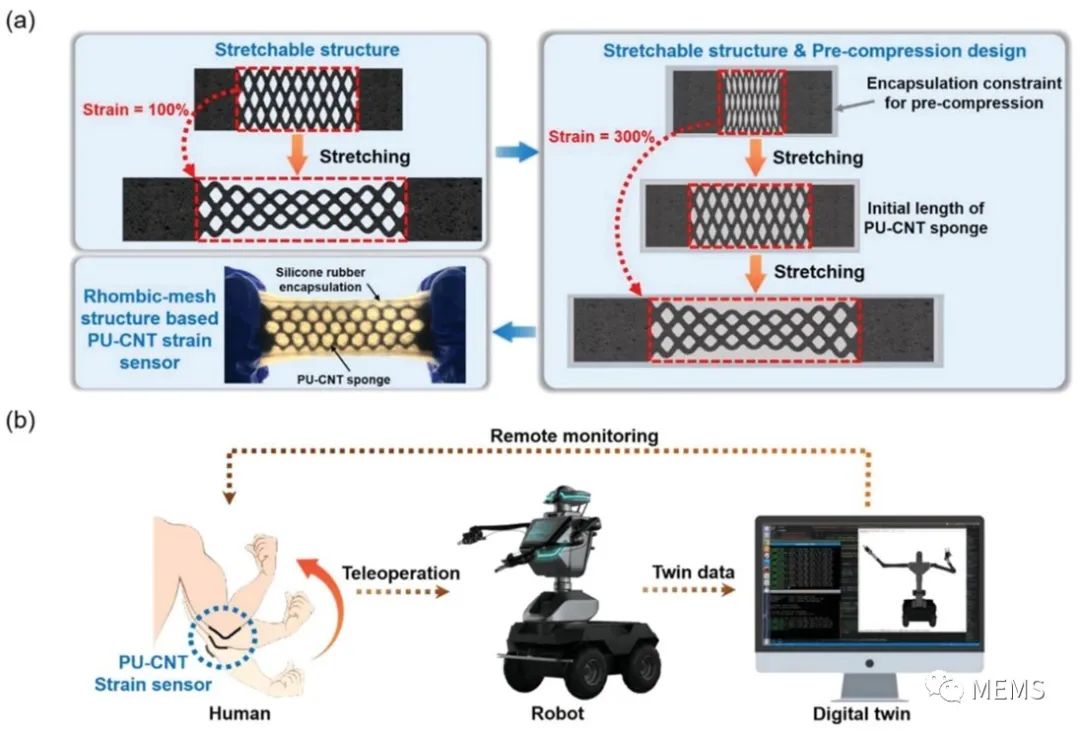
基于菱形网格结构的PU-CNT应变传感器的设计和应用实例
在本研究中,所提出的应变传感器主要由柔性多孔基底、导电填料、弹性体封装层和用于电气互连的导线组成。一种柔性PU海绵被用作多孔基底,因为它具有很大的弹性,且重量轻。为了提高应变传感器的可拉伸性,将PU基底的中间区域设计为45°内角的菱形网格结构。菱形几何形状的可变形性赋予了传感器预压缩的空间。选择导电性优异的CNT涂覆在PU海绵支架上,形成导电骨架。PU-CNT海绵经过预压缩,进一步提高应变传感器的可拉伸性。为了保持应变传感器的预压缩状态,传感器的每个表面都覆盖一层1 mm的硅橡胶层。值得注意的是,所采用的硅橡胶的拉伸性远远高于预压缩的PU-CNT海绵,从而避免对所提出的应变传感器拉伸性的影响。为了实现电气互连,在传感器的顶部和底部插入直径为0.2 mm的铜线,两者都垂直于传感器的拉伸方向。
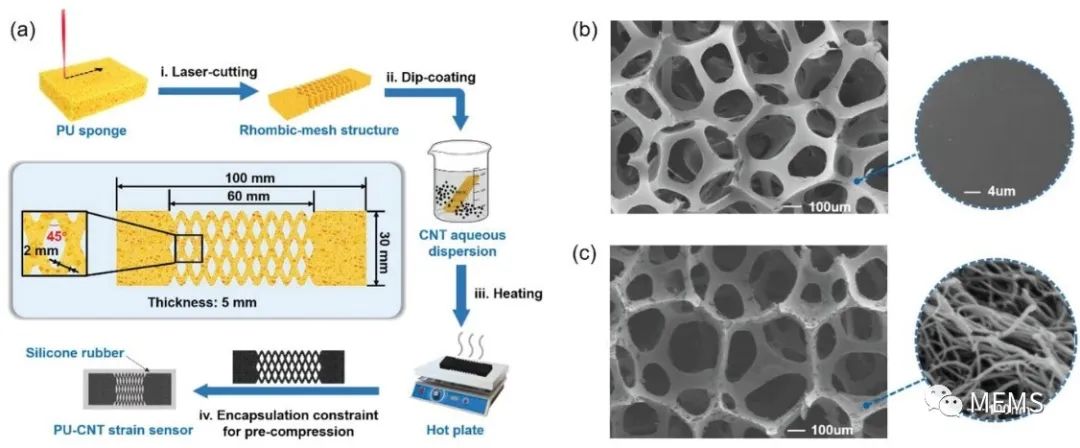
PU-CNT应变传感器原型设计
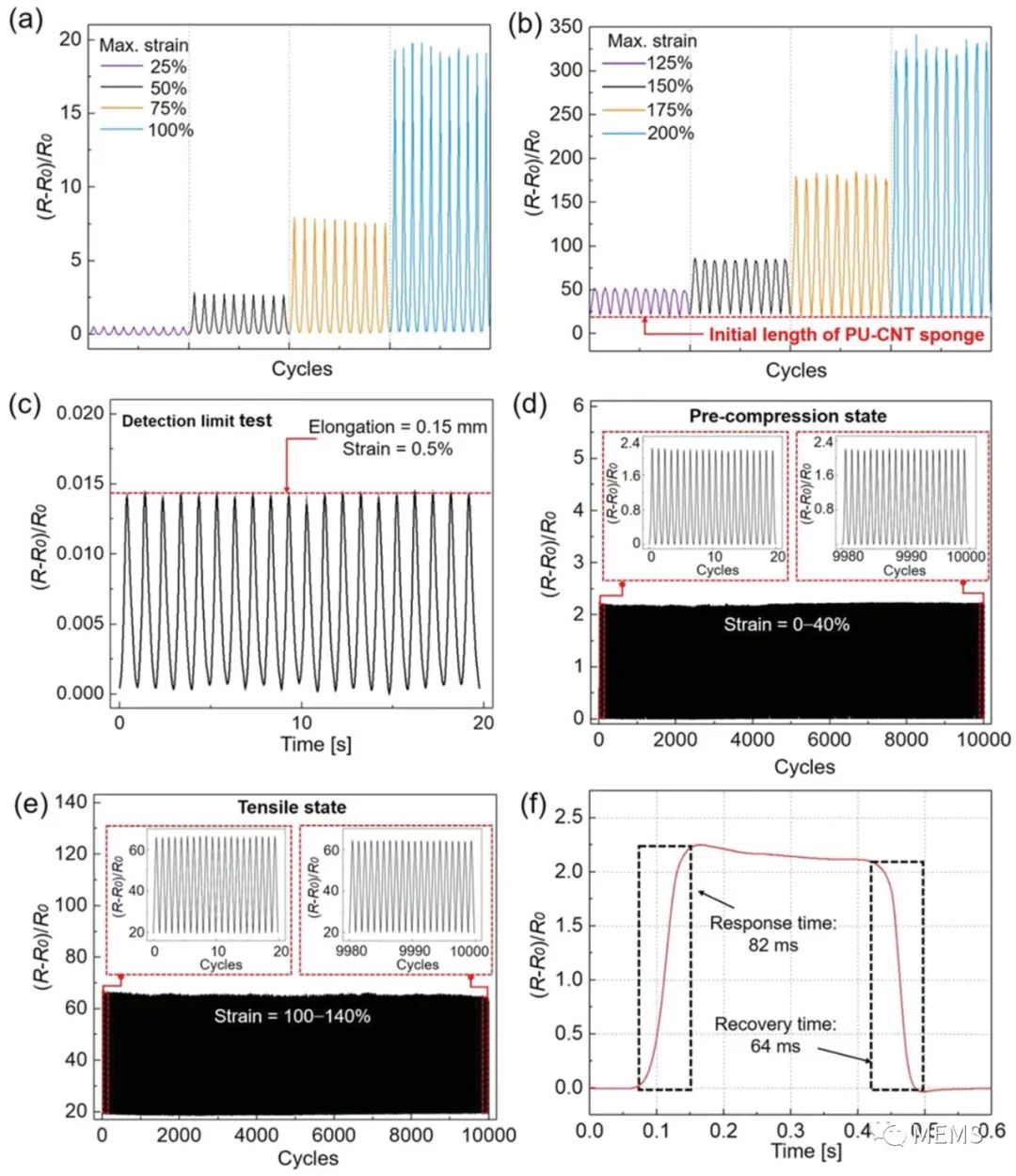
PU-CNT应变传感器在预压缩状态(0-100%应变)和拉伸状态(100-300%)的较宽工作范围内均具有良好的重复性和动态稳定性。此外,对微小应变的感知能力也是应变传感器的重要指标。在1 Hz的动态负载下,该应变传感器在0.5%应变下的传感响应基本保持不变。相对电阻变化达到1.4%,这归因于应变传感器在预压缩状态下的高灵敏度。检测范围的下限赋予了应变传感器对人体关节微小运动检测的潜力,这对于遥操作场景中操作人员的动作捕捉至关重要。
PU-CNT应变传感器的综合传感性能
为了验证所提出的PU-CNT应变传感器作为关节可穿戴设备的应用前景,研究人员将该传感器附着在膝关节、肘部和腕部三个典型关节上,同时在关节运动过程中实时记录PU-CNT应力传感器的传感信号。实验结果表明,当三个关节的弯曲程度增大时,传感器输出的信号也相应增大。该应变传感器的响应稳定而灵敏。因此,可以基于PU-CNT应变传感器的可分辨电阻变化来测量关节的运动。为了进一步验证PU-CNT应变传感器在遥操作场景中的实际性能,研究人员将传感器固定在操作员的肘部,以远程控制机械臂Jaco2。当操作者依次弯曲肘关节30°、60°、90°、120°时,实现了对jaco2机械臂第三关节的遥操作。

在遥操作场景中的应用
总之,研究人员提出了一种用于人体关节运动捕捉的新型应变传感器原型。一方面,菱形网格结构与预压缩设计相结合,为应变传感器提供了额外的伸长率,从而实现了拉伸性能的提高。另一方面,PU海绵的多孔微结构赋予了传感器高灵敏度。所提出的PU-CNT应变传感器具有高达300%的拉伸性和3893的最大应变系数。值得注意的是,该应变传感器还具有10,000次循环的长期耐用性,以及82 ms的快速响应时间,从而确保了应变传感器稳定快速的传感性能。最后,将所开发的传感器部署在人体关节上进行运动检测,证明了其在遥操作场景中的应用前景。
-
松下PaPIRs和PaPIRs+ PIR运动传感器:高灵敏度与可靠性之选2025-12-21 1407
-
研究用于人体足底压力和步态分析的高灵敏度压力传感器2025-04-17 1479
-
南京大学:高灵敏度和高线性度的可拉伸应变传感器的分层结构设计2024-07-08 1681
-
柔性传感器的灵敏度多少算高?传感器灵敏度大小与灵敏系数的关系2023-10-24 5080
-
应用于血液中凝血酶精准检测的高灵敏度传感器2022-04-08 10442
-
高灵敏度单极霍尔开关电路传感器HAL5802021-06-23 1265
-
ADPD2212:低噪声、高灵敏度光学传感器数据表2021-04-30 1009
-
ADPD2211:低噪声、高灵敏度光学传感器数据表2021-04-29 1299
-
请问高灵敏度用什么传感器好?2019-03-29 2600
-
高灵敏度微球激光传感器2018-12-03 3098
-
求一个精度高,高灵敏度的温度传感器2015-10-29 4543
-
传感器的灵敏度2014-07-26 4396
-
FKS高灵敏度气压传感器2009-10-21 1376
-
电阻应变片传感器的灵敏度测量2008-06-04 20250
全部0条评论

快来发表一下你的评论吧 !
