

KUKA-VASS大众版本:给模拟输出端赋值
机器人
描述
通过给模拟输出端赋值,可通过机器人控制器输出模拟电压。具体则可根据应用情况而定对以下模拟输出端赋值:
• ana=KONST:输出稳态电压值的模拟输出端,例如,在给粘结剂进行配量时
• ana=Vprop:输出和速度成正比的电压值的模拟输出端,例如,用于气体保护焊时的参数设定
• ana=KST+P:模拟输出端输出一个与摆动位置有关的电压值,例如,用于点焊钳的阶梯式压力控制
机器人控制系统可以管理16 个模拟输入端和16 个模拟输出端。输入端或输出端是在控制设备PC 里通过KUKA 总线卡来实现控制的。配置是按用户要求而定的。
模拟输入/输出端允许的数值范围:-1.0 至+1.0。该值相当于电压范围-10 V 至 +10 V。如果超过该值,则输入/输出端会采用最大值并显示一条信息,直至数值又回到允许范围内。
行指令 ana=KONST

指令给一个模拟输出端赋值,使之用于输出静态电压值。输出端的赋值可与一项条件关联。
示例:

在满足以下条件时,模拟输出端 3 给出 1 000 mV :标记 21 为 TRUE。
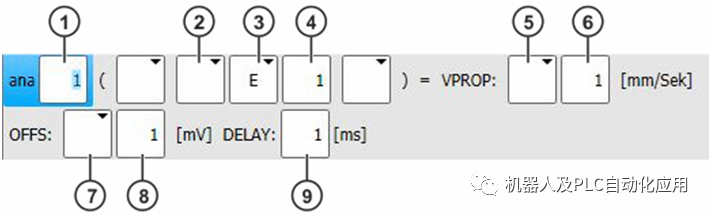
行指令 ana=Vprop
指令给一个模拟输出端赋值,使之用于输出动态电压。输出端的赋值可与一项条件关联。
输出的电压在以下数值的影响下可动态发生变化:
• 速度
• 偏量
与速度成正比的模拟动作仅在CP运行情况下方可行(LIN, KLIN, CIRC, KCIR)。
ana=Vprop 始终在点上切换,与是否为该点编程 PLC 触发器无关。
视具体的 Delay 值而定,机器人控制系统在程序运行期间决定指令是否被轨迹逼近。通常进行轨迹逼近。在以下情况下执行精确暂停:
• 当程序中第一次出现 ana=Vprop时。
• 当 Delay值发生变化时,即程序中不止一次地出现 ana=Vprop且指令的Delay值与下一数值不同。
当 ana=KONST或 ana=KST+P的 后 面 为 ana=Vprop时
示例 1
在此例中,当速度为500 毫米/秒时最大可能输出的电压值为 10 000mV。

当满足以下条件时,模拟输出将被激活:输入端 16 为FALSE。此模拟输出保持激活状态,直到一个静态模拟输出将其关闭为止(ana=KONST 或 ana=KST+P) 。
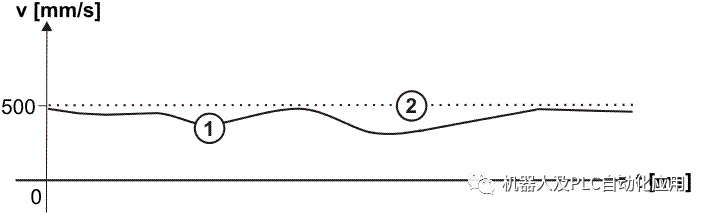
1 当前机器人速度
2 最高电压输出时的机器人速度
示例 2
此例中为进行最佳的粘合应用,当机器人速度为 400 毫米/秒时需要5 000 mV 的模拟电压。测试表明,当偏移量为 -70 mV 时,粘合控制装置内部模拟数值方才达到 0 V。

所需的 5000 mV 将在机器人速度为 400 毫米/秒时由模拟输出端输出。为达到最大可能的10 000 mV 电压,机器人必须以 800 毫米/秒的速度移动。此速度必须输入行指令中.
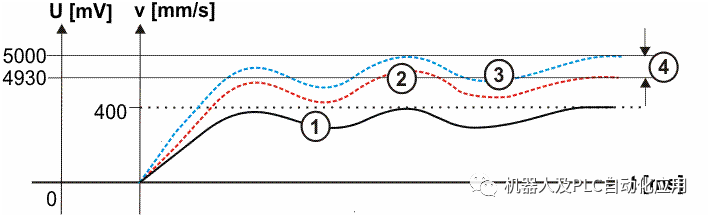
| 1 | 当前机器人速度 |
| 2 | 模拟输出端上的电压:4 930 mV |
| 3 | 所需的模拟输出端电压:5 000 mV |
| 4 | 偏移量:-70 mV |
示 例 3

在此例中,当偏移量为-70 mV 时,粘合控制装置比机器人先启动 85 毫秒。
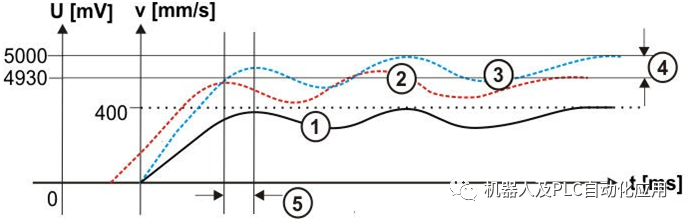
1 粘合控制装置
2 模拟输出端上的电压:4930mV
3 所需的模拟输出端电压:5000mV
4 偏移量:-70mV
行指令 ana=KST+P
当机器人动作轨迹和摆动动作路线重叠时,将用到该指令。用此指令可以为用于输出电压的模拟输出端赋值,其电压值取决于摆动振幅上的摆动位置。输出端的赋值可与一项条件关联。
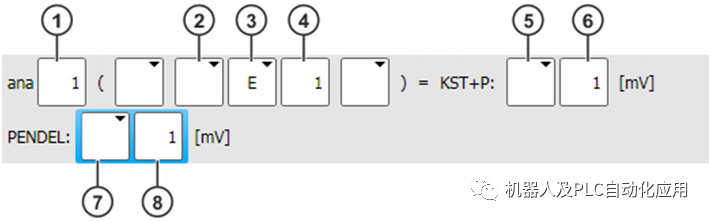
示例

当满足以下条件时,模拟输出将被激活:输入端 1 为“TRUE”。输出的电压在2 750 mV 和 4 250 mV 之间,并取决于摆动的当前位置.
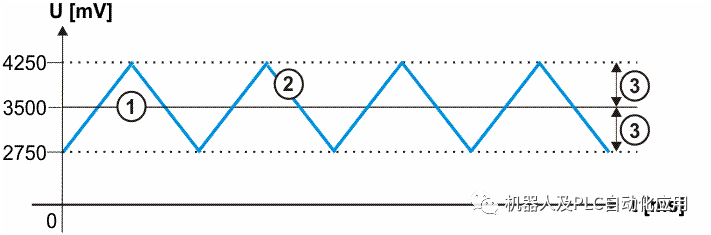
1 静态电压
2 模拟输出端上的电压:三角形摆动图形
3 电压或者摆动图形的振幅
审核编辑:刘清
-
大众版KUKA程序的区别2023-07-07 2354
-
KUKA大众标准与标准版机器人程序的不同2023-06-08 5058
-
KUKA给整数计数器或者二进制输出端赋值2023-04-15 3436
-
保护三线制模拟输出2023-04-13 1651
-
机器人控制器如何给模拟输出端赋值V4.82023-04-10 1116
-
KUKA大众版8.2系统外部轴配置2023-01-29 4308
-
模拟输出及架构概览2022-11-04 783
-
KUKS -ANOUT:循环说明模拟输出端2022-07-28 1786
-
Arduino模拟输出开源2022-07-22 679
-
大众版KUKA程序的轨迹程序分解2022-07-08 4745
-
如何构建环路供电的模拟输出2022-01-28 2609
-
概述KUKS -ANOUT的循环说明模拟输出端2021-05-08 3351
-
一招教你实现通用模拟输出设计2018-07-10 9251
-
如何设计通用模拟输出2017-04-18 1068
全部0条评论

快来发表一下你的评论吧 !
