

GNSS技术助力自动割草机转型升级
描述
高精度GNSS定位技术正在推动割草机器人转型,提高其易用性、效率、可靠性和性能。
早在多年前,割草机器人就已经走进大众视野。割草机器人一般在埋设有边界线的庭院中进行除草工作,利用简单的传感器避开树木和其他障碍物。
但通常割草机要花些时间才能打理好草坪,而且也没办法修剪出漂亮的条纹图案,但无需人工且整体效果不错。
如今,高精度全球导航卫星系统(GNSS)技术正在推动割草机实现升级。实时动态(RTK)GNSS接收机可实现厘米级定位精度,系统而有效地指引割草机器人,确保其不会在同一个位置修剪两次。这样不仅无需再埋设边界线,还能省时省电,并保护您的草坪。
OpenMower:快速轻松执行评估的好帮手
OpenMower是一款内置u-blox ZED-F9R RTK GNSS接收机的开源割草机器人测试平台,该平台由Clemens Elflein开发,他是一位软件工程、硬件设计和机器人的狂热爱好者,同时也是OpenMower项目创始人。
OpenMower基于机器人操作系统ROS,提供了一个高度灵活的平台,支持使用不同的传感器设置为各种机器人系统制作原型。
专研割草机器人的产品开发者面临着诸多问题:在其特定使用场景中,哪些传感器能为定位解决方案提供理想的补充?他们的传感器融合算法如何利用惯性传感器和轮速脉冲信息?在单层房屋、公寓楼、树木或栅栏附近,定位精度表现如何?
OpenMower为产品开发者提供了一种强大的工具,可以帮助他们回答此类问题、评估高精度定位解决方案的性能,并评估其原型。
OpenMower涵盖硬件和软件,配有方便易用的割草机底座以及防风雨外壳,可在各种恶劣天气下进行长时间测试。
在系统设置完毕后,开发者可以轻松长时间运行割草机,以获取性能数据。在没有“真值”定位解决方案的情况下,可使用KML和视频记录来检查交叉航迹的误差。
经过现实环境试验和测试
我们在德国的一处庭院中使用Ardusimple公司的RTK+INS SimpleRTK2B开发板操控OpenMower,这款开发板配有u-blox ZED-F9R-03B。测试中收集到的数据表明,这是一个8米x8米的地块,共有三条通道,边界不规则,庭院中心位置有一个专门留出的树木区。
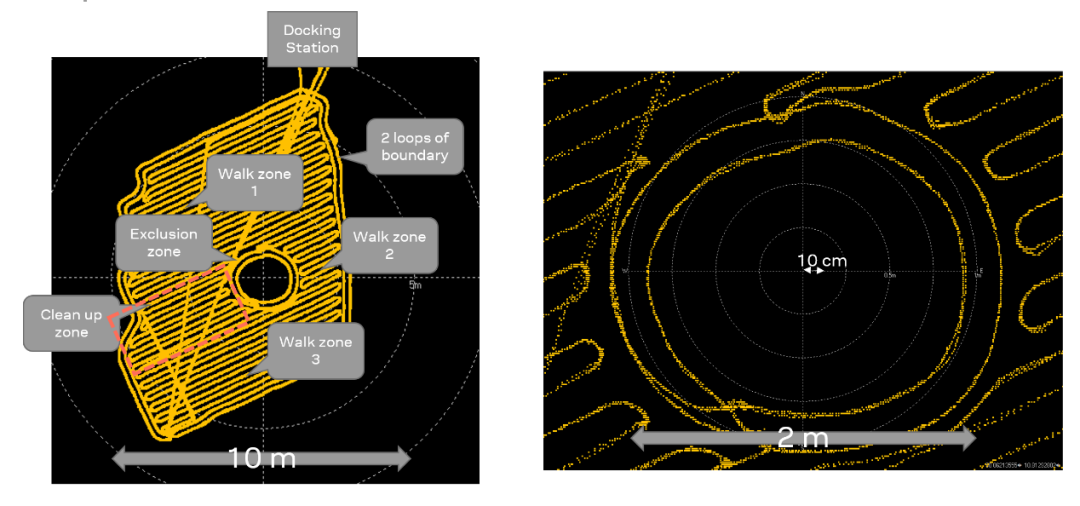
此处展示了整理为KML记录的结果,其含义不言自明。各通道精准重叠,在直线延伸部分最为明显。弯角位置的变化在很大程度上可归因于不够完美的运动控制。
精准的性能源自ZED-F9R模块,该模块通过足够高的更新速率提供姿态和定位信息,顺畅地操控割草机。
支持多种操作模式
OpenMower的设计支持多种操作模式。如下表所示,该系统支持基准站/移动站设置,也可使用PointPerfect这样的增强服务,包括使用或不使用惯性传感器测量和轮速脉冲输入的情况。
该定位解决方案可采用u-blox ZED-F9P RTK GNSS接收机或u-blox ZED-F9R RTK GNSS接收机。该解决方案还有一种使用u-blox XPLR-HPG-2探索套件的型号,适合专注于蜂窝通信技术的设计。
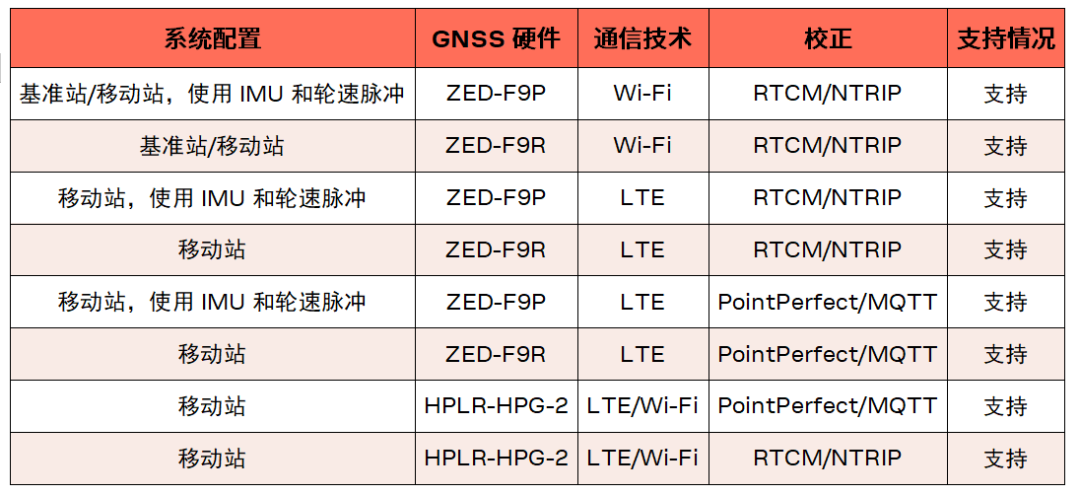
根据所用设置的不同,GNSS校正数据通过Wi-Fi或4G LTE无线通信传输,可采用RTCM/NTRIP或PointPerfect/MQTT方式提供。
幕后揭秘
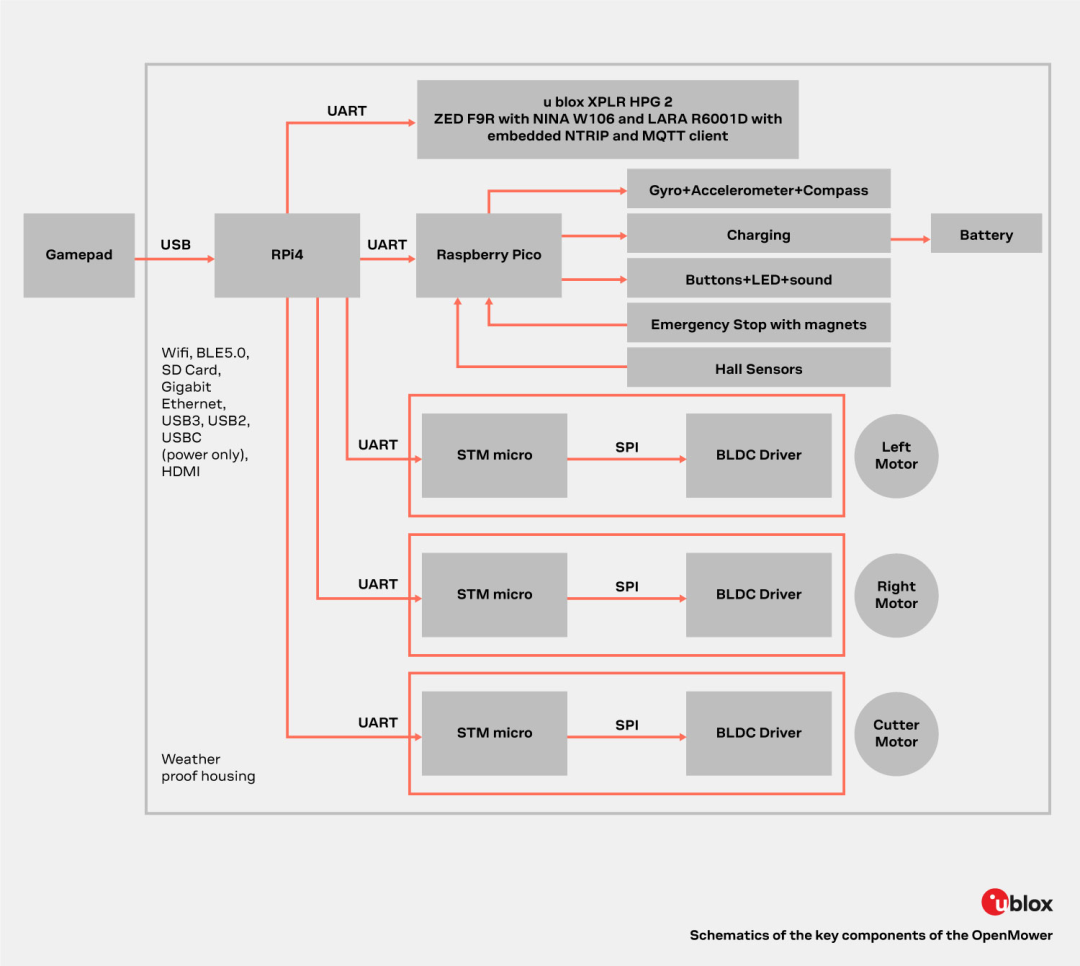
深入探究后,我们确定了为OpenMower演示和测试平台提供动力的关键组件,其包括一个基于u-blox ZED-F9P/u-blox ZED-F9R的Ardusimple RTK GNSS接收机,利用4G调制解调器通过NTRIP或MQTT接收GNSS校正数据。
其主要应用处理器是拥有数GB存储空间的树莓派4,以及负责控制主要传感器和充电的树莓派Pico。此配置主要考虑到OpenMower的设计目的是为其他机器人应用搭建探索平台,具体可以包括在农场采集土壤样本的小型机器人、在足球场上绘制线条或在草坪上绘制企业徽标的整个机器人机组,甚至是寻找地下宝藏的机器人。
/关于u-blox公司/
瑞士u-blox公司(SIX:UBXN)是为汽车、工业和消费品市场提供定位和无线通信技术与服务的领先供应商。其解决方案能准确进行人员、车辆和机器的定位,并通过蜂窝网络和短距离网络实现无线通信。凭借广泛及多样化的芯片、模块和日益扩大的产品支持数据服务生态系统,u-blox公司在帮助其客户针对物联网快速而成本高效地开发创新解决方案方面具有得天独厚的优势。u-blox公司总部设在瑞士塔尔维尔,目前在欧洲、亚洲和美国都设有办事处。www.u-blox.com
审核编辑:汤梓红
-
NXP MCXA系列MCU在电动割草机中的应用场景和关键功能2025-12-11 3340
-
广和通智能割草机行业解决方案亮相SPOGA+GAFA,尽展AI领潮者风范2024-06-21 1753
-
XV7181BB陀螺仪传感器在自动割草机中的应用2024-06-12 1332
-
EPSON爱普生高精度惯性导航模块赋能无人割草机新赛道2023-12-19 1955
-
用Arduino做一个自动割草机2023-07-07 3809
-
智能、安全、高效,看移远如何助力割草机智能化升级2023-07-04 1464
-
机器人割草机开源分享2023-06-15 2283
-
自动割草机v1开源项目2023-02-03 1123
-
无感锂电割草机视频2022-04-09 15631
-
牛!当杂草遇到“黑科技”,智能割草机完胜!2021-10-15 3103
-
割草机的硬件主要是由哪些部分组成的?2021-07-13 2497
-
怎样给割草机装上太阳能2018-09-11 5420
-
自动割草机器人的设计2010-11-22 795
全部0条评论

快来发表一下你的评论吧 !
