

UART整体的仿真方法和testbench结构讲解
电子说
1.4w人已加入
描述
仿真框架
仿真部分结构和设计类似,同样有波特率、接收数据和发送数据模型。仿真的实现比较灵活,不用考虑可综合性。主要实现master功能,配置部分对DUT配置,发送模型发送数据到DUT,接收模型接收到数据后与发送数据进行对比,验证基本功能的正确性。
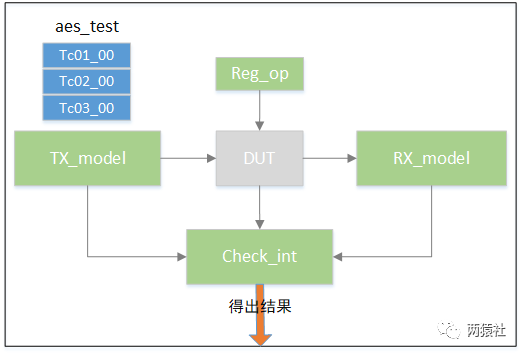
仿真框架
伤真顶层产生时钟、复位,信号的初始化,测试用例的选择以及全局变量或参数的定义(如寄存器地址和某些多模块需要用到的变量)。
////////////////////////////////////////
`timescale 1ns/1ps
//`define tc01_00
//`define tc02_00
`define tc03_00
module top();
reg clk; // ARM clk
reg clk26m; // 26M function clk
reg rst_; // ARM clk's rst_
reg rst26m_; // function clk's rst_
reg tx_data; // send data line
wire rx_data; // receive data line
wire uart_int; // uart interrupt
// APB signals
reg [3:0] paddr;
reg [31:0] pwdata;
reg psel;
reg penable;
reg pwrite;
wire [31:0] prdata;
reg baud_tclk; // send data baud clk
reg baud_rclk; // receive data baud clk
reg start; // receive data baud enable signal
reg rx_done; // receive one data done
reg w_state; // write reg using signal
reg r_state; // read reg using signal
reg [7:0] tx_data_mem[0:999]; // send data memory
reg [7:0] rx_data_mem[0:999]; // receive data memory
reg [31:0] uart_tx;
reg [31:0] uart_rx;
reg [31:0] uart_baud;
reg [31:0] uart_conf;
reg [31:0] uart_rxtrig;
reg [31:0] uart_txtrig;
reg [31:0] uart_delay;
reg [31:0] uart_status;
reg [31:0] uart_rxfifo_stat;
reg [31:0] uart_txfifo_stat;
// when tx_model is runing a second time ,we don't want tx_cnt clean,
// so defind tx_cnt in top
integer tx_cnt;
parameter clk_period = 10;
parameter clk26m_period = 38;
parameter uart_tx_addr = 4'h0;
parameter uart_rx_addr = 4'h1;
parameter uart_baud_addr = 4'h2;
parameter uart_conf_addr = 4'h3;
parameter uart_rxtrig_addr = 4'h4;
parameter uart_txtrig_addr = 4'h5;
parameter uart_delay_addr = 4'h6;
parameter uart_status_addr = 4'h7;
parameter uart_rxfifo_stat_addr = 4'h8;
parameter uart_txfifo_stat_addr = 4'h9;
`include "UART_baud.v"
`include "reg_op.v"
`include "check_int.v"
`include "uart_tx_model.v"
`include "uart_rx_model.v"
`include "tc01_00.v"
`include "tc02_00.v"
`include "tc03_00.v"
// cases of uart
UART_TOP DUT(
.clk(clk),
.clk26m(clk26m),
.rst_(rst_),
.rst26m_(rst26m_),
.paddr_i(paddr),
.pwdata_i(pwdata),
.psel_i(psel),
.penable_i(penable),
.pwrite_i(pwrite),
.urxd_i(tx_data),
.utxd_o(rx_data),
.uart_int_o(uart_int),
.prdata_o(prdata)
);
// always produce clk
always#(clk_period/2) clk = ~clk;
always#(clk26m_period/2) clk26m = ~clk26m;
// signals initialize
initialbegin
clk = 1'b0;
clk26m = 1'b0;
rst_ = 1'b1;
rst26m_ = 1'b1;
baud_tclk = 1'b0;
baud_rclk = 1'b0;
tx_data = 1'b1;
start = 1'b0;
rx_done = 1'b0;
w_state = 1'b0;
r_state = 1'b0;
uart_tx = 32'h0;
uart_baud = 32'hf152;
uart_conf = 32'h34;
uart_rxtrig = 32'h1;
uart_txtrig = 32'h0;
uart_delay = 32'h2;
uart_status = 32'h0;
tx_cnt = 0;
#50;
rst_ = 1'b0;
rst26m_ = 1'b0;
#100;
rst_ = 1'b1;
rst26m_ = 1'b1;
end
initialbegin
@(posedge rst_) beginend
fork
UART_baud();
check_int();
uart_rx_model();
join
end
initialbegin
@(posedge rst_) beginend
`ifdef tc01_00 tc01_00(10); `endif
`ifdef tc02_00 tc02_00(); `endif
`ifdef tc03_00 tc03_00(); `endif
end
endmodule