

飞凌嵌入式RK3588开发板推理模型转换及测试
电子说
描述
RKNN(Rockchip Neural Network)是一种用于嵌入式设备的深度学习推理框架,它提供了一个端到端的解决方案,用于将训练好的深度学习模型转换为在嵌入式设备上运行的可执行文件。
使用RKNN框架可以在嵌入式设备上高效地运行深度学习模型,这对于需要在资源受限的设备上进行实时推理的应用场景非常有用。例如,可以将RKNN用于智能摄像头、机器人、无人机等嵌入式设备中,实现物体检测、人脸识别、图像分类等人工智能功能。
RKNN-Toolkit2是为用户提供在 PC、 Rockchip NPU 平台上进行模型转换、推理和性能评估的开发套件,用户通过该工具提供的 Python 接口可以便捷地完成模型转换、量化功能、模型推理、性能和内存评估以及量化精度分析等多种操作。
下面,我们就使用RKNN-Toolkit2工具将rknpu2工程中的yolov5s.onnx模型转换为yolov5s.rknn模型为例进行讲解。
开发工具:飞凌嵌入式OK3588-C开发板
开发环境:Ubuntu20.04
01
下载RKNN-Toolkit2

02
安装依赖
requirements_cp36-1.3.0.txt文件,在rknn-toolkit2/doc目录下:

03
开发环境与OK3588-C开发板连接
开发环境中安装adb

使用USB-typeC线连接到板子的TypeC0接口,PC端识别到虚拟机中。
在开发环境中检查是否连接成功

如果连接成功会返回板子的设备ID,如下:

04
下载NPU工程

05
将rknn_server和rknn库发送到开发板

06
模型转换
在开发环境中进入到rknn_toolkit2工具中的examples目录中选择一个模型。本例选择的是将onnx模型转换为RKNN模型。
修改test.py

在rknn.config中添加target_platform='rk3588'
在rknn.init_runtime中添加target='rk3588'
修改完成后,运行test.py

运行成功结果如下:

同时在目录下会生成yolov5s.rknn模型。

07
编译测试源码
进入到rknpu2/examples/rknn_yolov5_demo目录下,设置环境变量:

执行编译脚本,进行编译:

然后在rknpu2/examples/rknn_yolov5_demo/install/rknn_yolov5_demo_Linux目录下会生成rknn_yolov5_demo

08
测试
将上边生成的yolov5s.rknn模型和install目录下的rknn_yolov5_demo_Linux拷贝到开发板中

使用rknn模型进行物体识别命令如下:

执行结果如下:
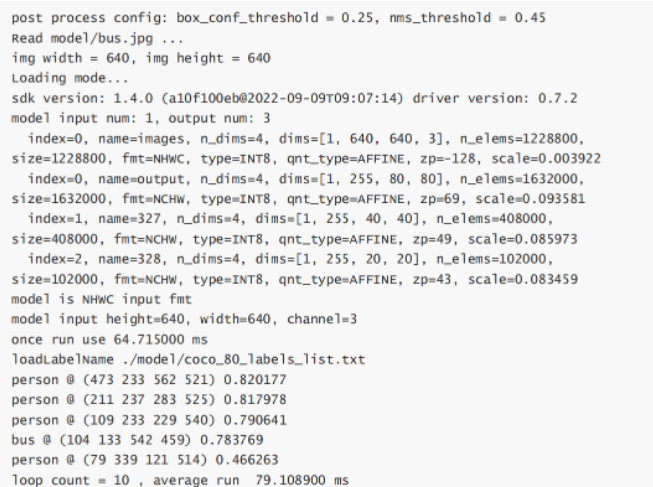
将生成的out.jpg拷贝到本地电脑中查看。
-
瑞芯微RK3588开发板RK3588 EVB和RK3588S EVB解读2022-09-22 23659
-
分享 |迅为基于RK3588开发板部署测试DeepSeek模型2025-02-18 2781
-
添越智创基于 RK3588 开发板部署测试 DeepSeek 模型全攻略2025-02-14 2875
-
【飞凌RK3568开发板试用体验】RKNN模型推理测试2022-12-08 3073
-
《深度学习嵌入式应用开发:基于RK3399Pro和RK3588》学习《前言》2023-03-10 4166
-
迅为RK3588开发板使用 tflite 框架2023-10-10 1643
-
使用rk3588多npu推理模型,模型总推理时间还增加了,这怎么解释2023-11-05 12651
-
关于瑞芯微 RK3588的试用体验2023-12-12 2616
-
戳进来,带你走近飞凌嵌入式AIoT旗舰级RK3588开发板2022-12-02 2563
-
动态讲解飞凌嵌入式RK3588开发板的性能参数、功耗及功能特点2022-12-05 3556
-
【新品抢先体验】飞凌嵌入式OK3588-C开发板免费试用2022-12-09 2736
-
技术帖——飞凌嵌入式RK3588开发板推理模型转换及测试2023-06-02 2569
-
RK3588!黑神话悟空,启动?-迅为电子RK3588开发板2024-08-30 2752
-
基于飞凌嵌入式RK3588核心板的8K全景相机方案2025-03-20 3642
-
瑞芯微RK3588 RKNN模型推理环境部署与功能测试技巧(上)2026-04-21 1240
全部0条评论

快来发表一下你的评论吧 !
