

MEMS传感器零偏参数讲解
电子说
描述
01说在前面的话
最近,经过一段时间不懈努力,实现了对 QMI8658 姿态传感器的零偏(即常值误差)进行标定。过去我曾整理过姿态传感器误差参数相关的文章,包括《MEMS 惯性传感器 02 - 参数指标&误差介绍》和《MEMS_惯性传感器12 - 再说参数指标&含义》。回想起来,尽管这两篇文章也很详细,但有时还是会让我感到困惑。在我的理解中,零偏误差相对较易被补偿。利用在静止状态下,利用加速度计的理论输出为 [0,0,1] 和陀螺仪的理论输出为 [0,0,0],即可消除零偏影响。但是,零偏重复性误差仍需要被扣除。这是因为随机漂移中包含很多噪声源,通常是白噪声。虽然这种噪声不能完全扣除,但我们可以通过使用更高精度的传感器或多颗传感器阵列来优化误差。
02传感器零偏参数
对于MEMS传感器,每一颗芯片都是独一无二的,所以芯片与芯片之间存在偏差。为了评价传感器的这种波动,常用方法是采用标准差(1 sigma)进行评价。 传感器在上电后就会出现漂移,又分为常值漂移和随机漂移两种。 常值漂移就叫零偏,通过多次测量的均值就可以获取到传感器的零偏。在后续系统使用时对其进行补偿。因为利用均值进行补偿的,所以在补偿后的常值漂移在传感器的输出中还会有一部分残余。因此,引出零偏重复性指标。 零偏重复性,它表征传感器每次零偏的接近重复程度,零偏重复性好的传感器经过补偿后,残余的常值漂移比较小,可以达到更高的精度。
零偏稳定性,反映的是传感器的随机漂移指标,又称随机噪声,一般认为是白噪声。 通常零偏稳定性是指,采集一段时间的数据,计算这一段数据的均方差,计算方差时上面提到的常值漂移被扣除。 因为不同厂家对零偏指标给出的参数不一样,不一样的主要原因是对白噪声的采用时间不一致。比如有 A、B两个传感器,如果 A 的 100s均方差与 B 的1s均方差相同,那B的性能一定好于A。 为了找到标准统一的评价结果,采用噪声谱密度(即噪声强度)这个指标。单位 (信号单位)/sqrt(Hz) [1]
ARW(角度随机游走)和RND(噪声强度)换算 [3]
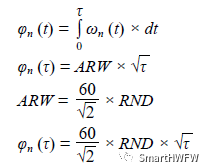
通常采用Allan方差法分析随机漂移的模型,其中包含随机游走、零偏不稳定性和角速率随机游走三个主要成分,可能还含有量化噪声和速率斜坡等噪声。
计算出随机游走系数,单位是 dfrac{°}{sqrt{h}},这个单位与噪声强度的换算关系是:1度每根号小时=60度每小时每根号赫兹。[2]
因此,零偏稳定性包括了随机游走的影响。随机游走系数大的传感器通常零偏稳定性不会很好;但反之,如果一个传感器的零偏稳定性(随机漂移)较差,随机游走系数却不一定大,因为造成零偏稳定性差的原因可能来自其它噪声源。
假设一个传感器的随机噪声部分完全是白噪声,那么它的零偏稳定性数值上正好是随机游走系数的 60 倍,如果算零偏稳定性的时候用的是100秒平滑的结果,那么上述比例关系就是 6 倍,而实际上由于传感器的噪声成分中不仅仅含有白噪声,因此这种 60倍或 6倍的比例关系在实际情况中很难遇到,通常如果计算零偏稳定性的时候计算的是100秒标准差,那么得到的结果通常数值上是随机游走系数的8至10倍左右。
总而言之,在评价传感器的零偏稳定性时,需要保证此时传感器的输出只有零位和噪声,如果能将噪声补偿掉,就更好了,剩下的信号求均方差,才是随机游走占主导的零偏稳定性。
03利用 QMI8658 姿态传感器标定前后数据对比
标定条件:
1) 下面的数据是将 QMI8658 姿态传感 Z 轴向上,静止放置在水平桌面上
2) 采集1分钟的数据
3) 加速度计的量程为 ±8g; ODR 500Hz
4) 陀螺仪的量程为 ±2048dps; ODR 500Hz
加速度计标定前后数据对比:
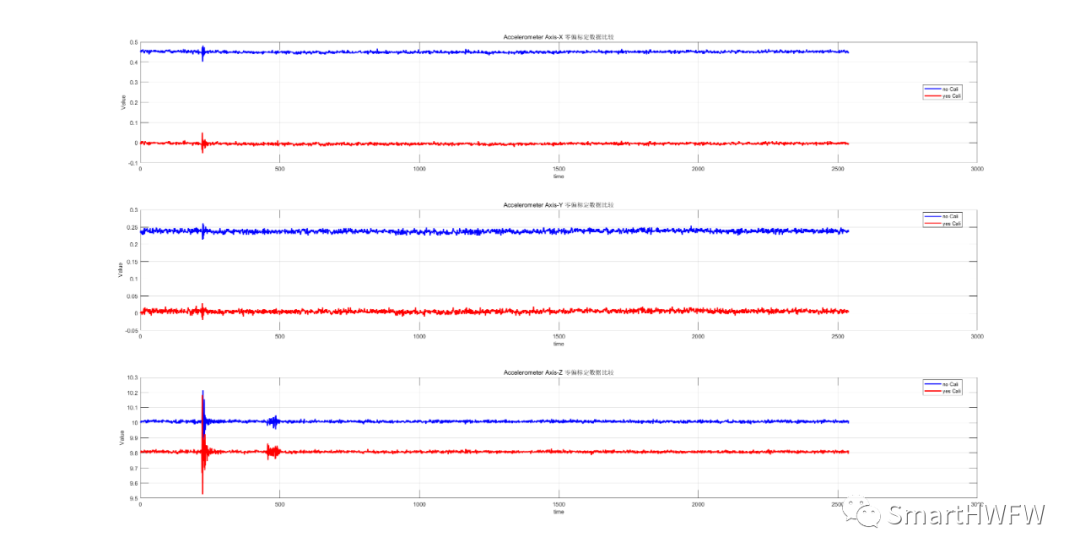
点击放大图片可以看出来,标定前的原始数据, X轴数据在 0.4 m/S^2 以上,Y轴数据在 0.25 m/S^2,经过标定算法后,X轴/Y轴均趋近于 0 m/S^2。同样,Z轴的数据由原来的10 m//S^2,标定到9.8 m//S^2.
陀螺仪标定前后数据对比:
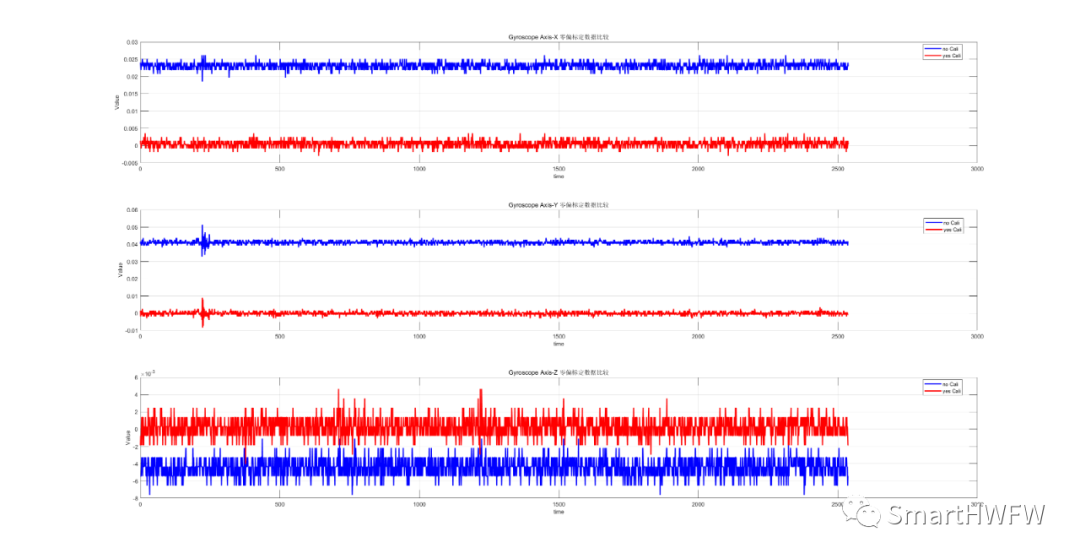
点击放大图片可以看出来,陀螺各轴数据均标定到趋近于 0。
审核编辑:汤梓红
-
理解传感器零偏Sensor Bias (offset)2025-11-17 925
-
MEMS惯性传感器都有哪些种类?MEMS惯性传感器有哪些特点2025-08-26 1524
-
mems传感器是什么意思_mems传感器原理是什么2024-10-18 9506
-
PPT详解MEMS微传感器的工作原理2023-10-20 1849
-
一文详解MEMS微传感器的工作原理2023-09-05 3182
-
详解MEMS微传感器的工作原理2023-03-29 2622
-
MEMS传感器焊接工艺2022-10-18 40002
-
MEMS惯性传感器的分类及应用解析2019-10-10 9963
-
基于闭环MEMS的电容式惯性传感器设计2018-11-06 2079
-
MEMS传感器保障汽车安全三大应用2018-05-11 2316
-
汽车电子MEMS传感器的应用2016-12-07 5374
-
MEMS传感器的分类2013-10-11 7678
-
MEMS传感器及其应用2012-08-14 4201
全部0条评论

快来发表一下你的评论吧 !
