

DC-DC的COT反馈控制模式
电源/新能源
描述
DC-DC----COT反馈控制模式
引言:滞后控制的微小变化使频率偏移最小化,但具有单个电压阈值电平,实现了快速瞬态响应。接通时间由一个单触发定时器控制,并且与输入电压成比例。当反馈电压下降到参考低阈值以下时,截止时间终止。在需要快速瞬态响应,而不需要固定或可预测的开关频率时,滞后控制非常有效。
1.滞回模式(恒定导通时间COT)
电源常用的两种控制方式,电压控制和电流控制。不论是电压控制还是电流控制都要用到误差放大器,它实际上就是带RC的运放,如图10-1:
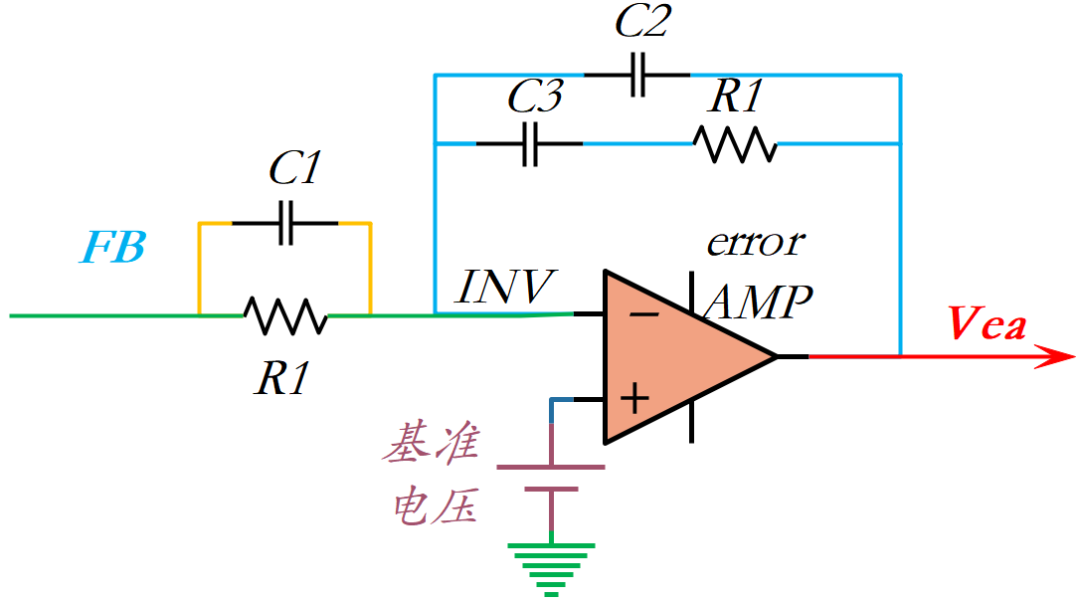
图10-1:内部误差放大器结构图
为了让电路工作稳定,通常需要合理设计其中每一个参数,另外如果输出电压发生变化,误差放大器的RC和时钟电路会把输出电压的变化延迟一段时间,再反应到控制电路,这样会降低响应速度,不然改善瞬态响应可能又需要重新去设计误差放大器的参数。如何平衡稳定性和瞬态响应又是一个比较矛盾的问题,于是我们把误差放大器换成比较器,同时把时钟控制的PWM发生器换成电压控制的On Time发生器,这个就是最基本的COT控制(图10-2),它的基本原理就是FB电压低于参考电压,就产生一个恒定导通时间的脉冲来控制上MOS的导通,做到既没有延时,也没有RC补偿。
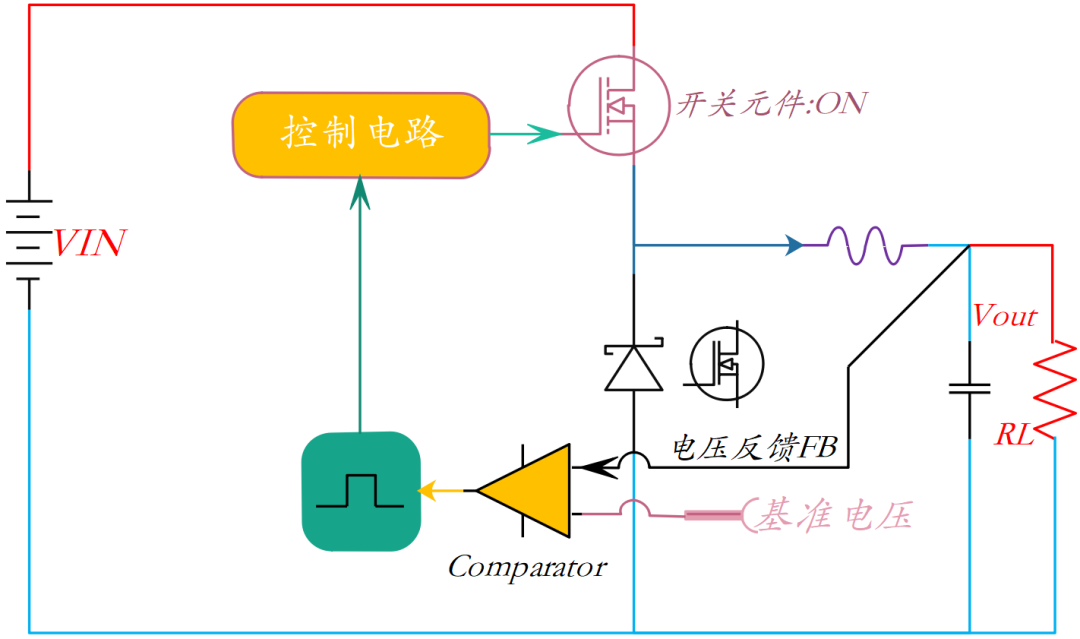
图10-2:基本COT控制图
但是如果输入电压不一样,开关频率就会发生变化,于是COT控制会检测输入电压,实现输入电压变化时开关频率很低。

(K为常数)
同样,COT控制也会检测输出电压,实现不同输出电压时,开关频率恒定。这才是一个常用的COT控制,但是与此同时如果输出全是磁片电容,还是会遇到不稳定的情况。因为COT控制需要FB电压存在一个和电感电流同相位的纹波,所以需要一定的ESR来稳定电路系统,ESR比较大的高分子电容或者是电解电容,这个同一相位的网络是存在的,稳定没有问题。但是对于磁片电容,ESR太小,没有办法保证FB上的纹波电压和电感电流同相位,所以就没有办法保证稳定。为了解决这个问题,常用的做法是在FB上加上如图所示的RC电路,产生一个和电感电路同相位的纹波:
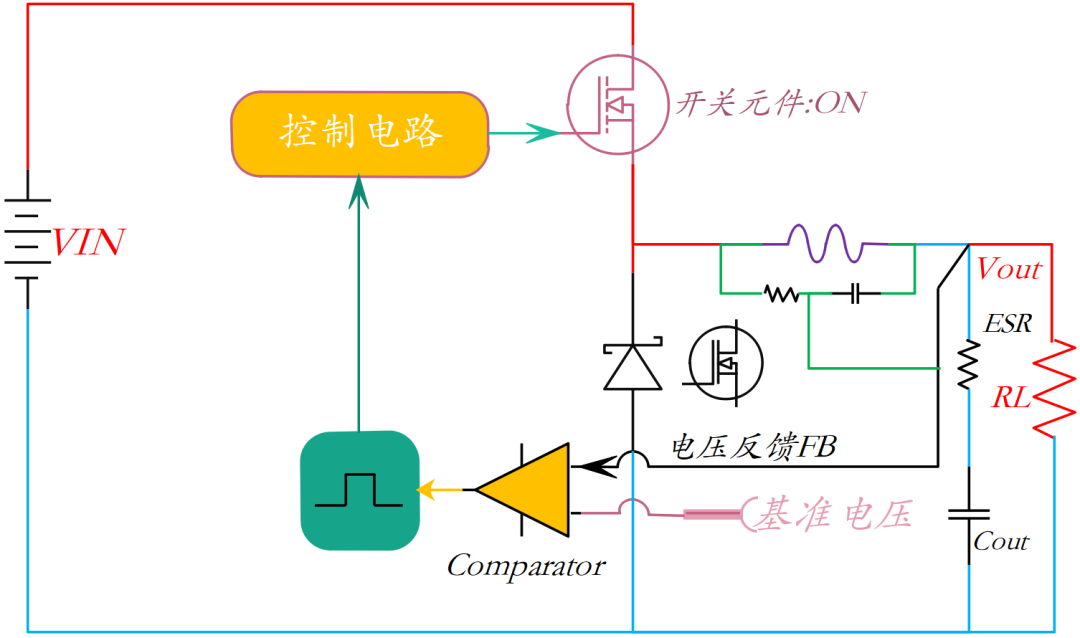
图10-3:带外置RC电路的COT控制
有的DC-DC是采用这种方式来稳定的。但有的是内部产生一个额外的斜坡补偿。另外COT控制方式,FB电压纹波导致实际的输出电压是比设定的目标电压要高的,这样就有了调整率的问题。于是引入一个速度很慢的EA(error AMP),用来调节实际的输出电压和设定的电压一致,但是并不会影响瞬态响应。
综上所述COT控制和纹波息息相关,所以COT控制也叫滞回控制方式,是针对需要极快负载瞬态响应的负载(例如CPU和FPGA的电源)的需求而开发出来的一种方式。因其可以检测并控制输出纹波,故也被称为“纹波控制”方式(图10-4)。
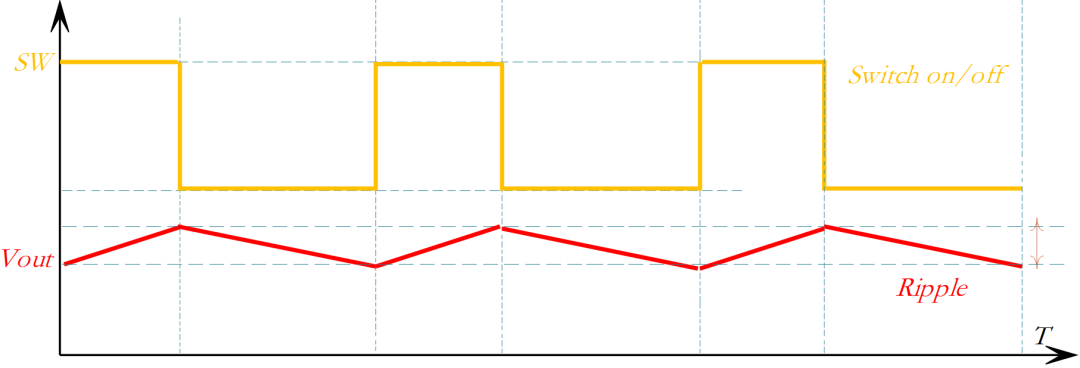
图10-4:纹波检测
这种方式由比较器来直接监控输出电压,无需借助误差放大器。比较器通过检测输出电压是否已超过或低于设置的阈值来直接控制开关的 ON/OFF。具体包括两种方式,一种是导通时间恒定,检测是否低于阈值;另一种是关断时间恒定,检测是否超过阈值(图10-4)。
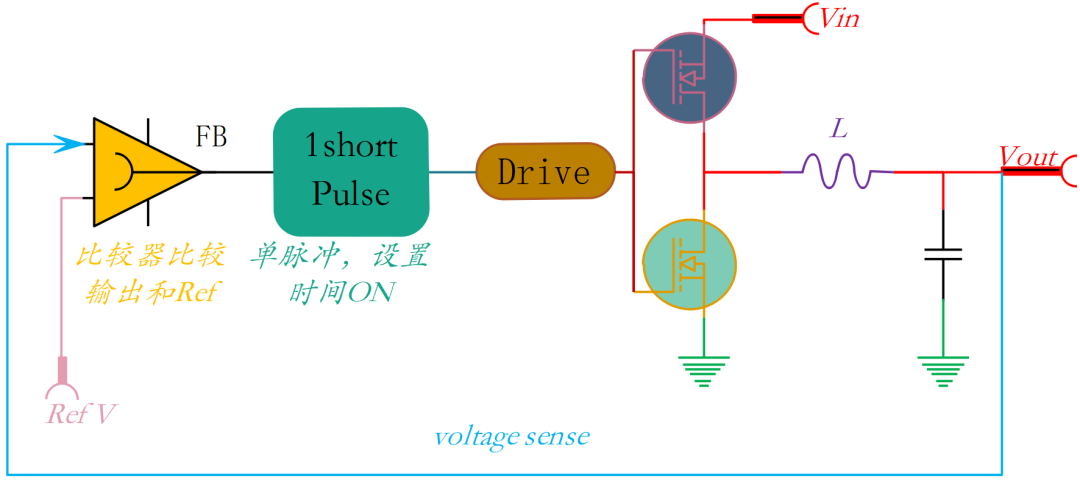
10-5:滞回控制模式结构图
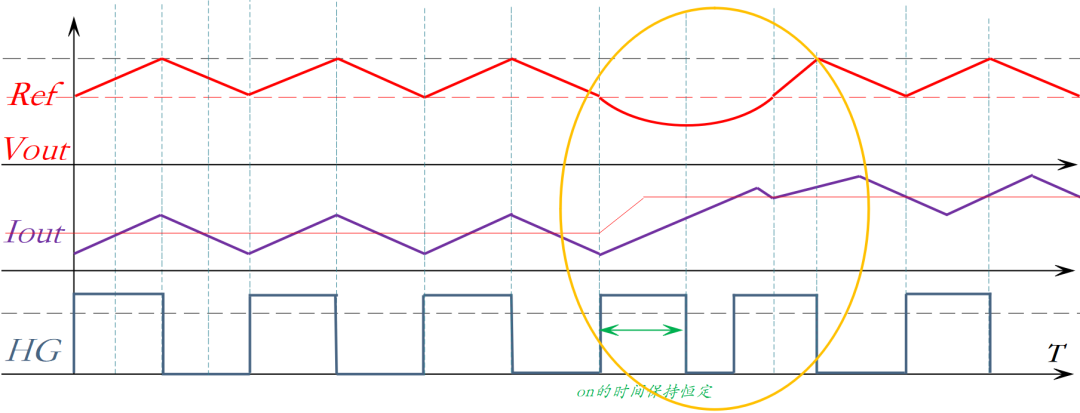
10-6:模拟负载变化响应波形
通过图10-6可以看到脉冲宽度恒定,但是振荡频率通过ON时间进行调整,黄色框内:无滞后,对负载变动可快速响应,延迟短,响应快,工作原理简单,无需相位补偿的调整,设计相对简单,振荡频率因输入输出条件和负载而变动。
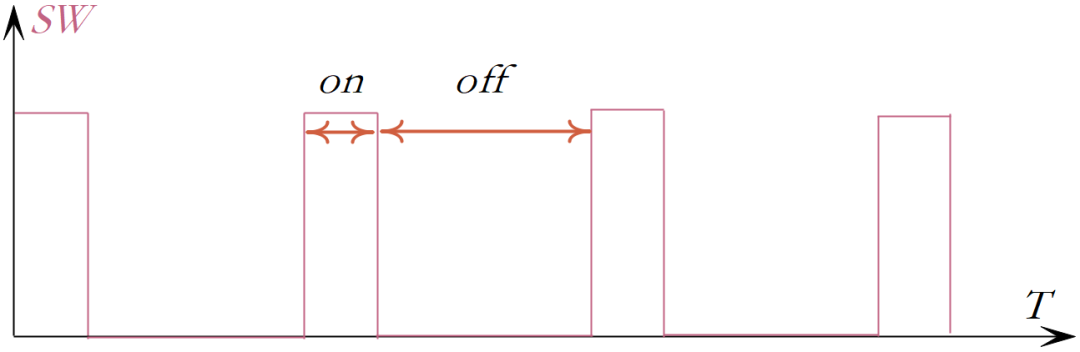
图10-7:COT振荡
ON时间控制的振荡频率计算:
输入输出条件与Ton、Toff的关系如下:
Ton:Toff=Vout:Vin-Vout
假设Vin=5V,Vout=1V,ON时间恒定200us,则振荡频率为:
200ns:800ns=1:5-1
那么:
F=1/(200ns+800ns)=1MHZ
这种方式的优点是因为由比较器直接控制,所以瞬态响应速度非常快,而且不需要相位补偿。缺点是开关频率波动;抖动(Jitter)大;为了检测输出纹波需要使用较大ESR(等效串联电阻)的输出电容器。但是由于这些缺点已经逐步得到改善,所以采用这种方式的DC-DC越来越常见。当反馈电压大于参考高阈值时,PWM(SW)接通时间(Ton)终止,而当反馈电压小于参考低阈值时,关断时间(Toff)终止。不需要补偿组件。PWM开关频率不受控制,并且随着负载电流而变化,并且在较轻的负载下提供更高的效率。
COT控制由于快速的瞬态响应和简单的环路补偿,广泛应用于主流Core芯片的供电。相应的,COT控制也经历了单相控制到单相多路并联再到多相多环路控制的发展历程。数字控制、COT支持像素自行编程,自动环路补偿,极大的简化设计,提高产品设计效率。
2 .COT with ERM
COT调节器的一种变体,它感测低端MOSFET的一部分关断时间电流,并将其注入误差比较器以模拟纹波。这种控制模式具有与COT相同的快速瞬态响应和较少的外部组件优势。当使用低ESR陶瓷电容器时,或当不需要外部纹波注入电路时,推荐使用COT with ERM。
3 .D-CAP
D-CAPTM
类似于COT控制,除了单触发定时器产生与输入电压和输出电压成比例的接通时间脉冲。当下降的反馈电压等于参考电压时,产生新的PWM导通脉冲。通过控制回路中的高速比较器实现对负载变化的快速响应。D-帽™ 与滞后控制相比,使频率偏移最小化。当需要快速瞬态响应并且使用POSCAP或中等ESR输出电容器时并且不需要环路补偿计算或组件,可以使用D-CAPTM。
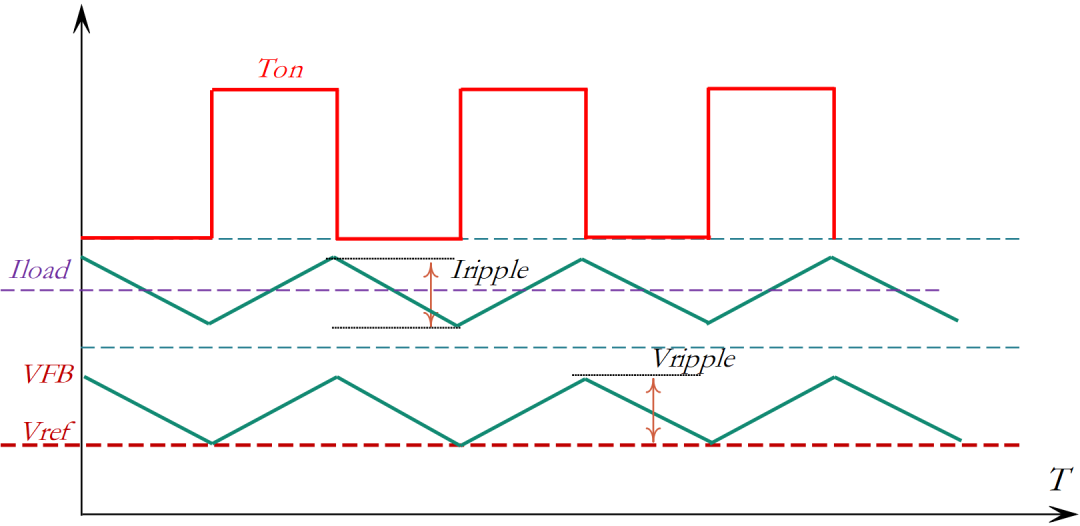
图10-8:调整波形
D-CAP2TM
D-CAP2TM略有变化,具有与D-CAP相同的瞬态和外部组件优势。这种控制模式支持陶瓷输出电容,无需外部电路。来自内部纹波注入电路的信号被直接馈送到比较器,从而减少了对电容器ESR输出电压纹波的需求。斜坡由输出电感器模拟。当需要低ESR陶瓷输出电容器的快速瞬态响应时可以使用D-CAP2TM。
D-CAP3TM
D-CAP2TM的变体,具有相同的瞬态和外部组件优点。转换器内置采样保持电路,以消除D-CAP2TM模拟斜坡电路产生的偏移电压,从而提高电压参考精度。非常适合为低核心电压FPGA、ASIC和DSP供电。当使用陶瓷输出电容器时,需要更严格的参考电压精度和快速的瞬态响应,可以使用D-CAP3TM。
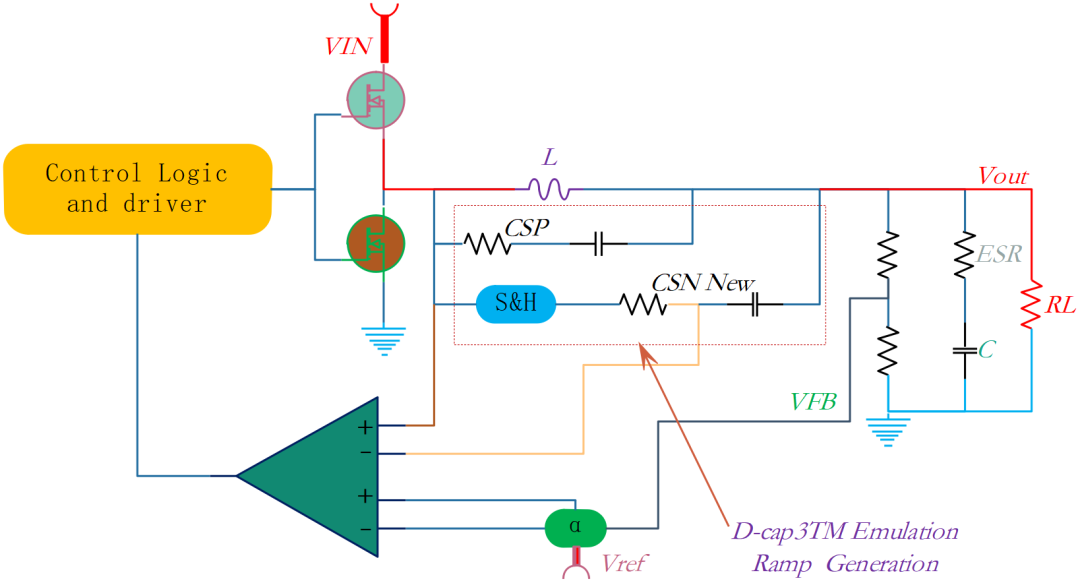
图10-9:D-CAP3TM原理
4.DCS
直接控制,无缝过渡到节能模式将迟滞控制的优点与电压模式控制的优点相结合,前者可在无补偿部件的情况下实现快速瞬态响应,后者可在从PWM到节能模式(PSM)的无缝转换中实现高直流精度。
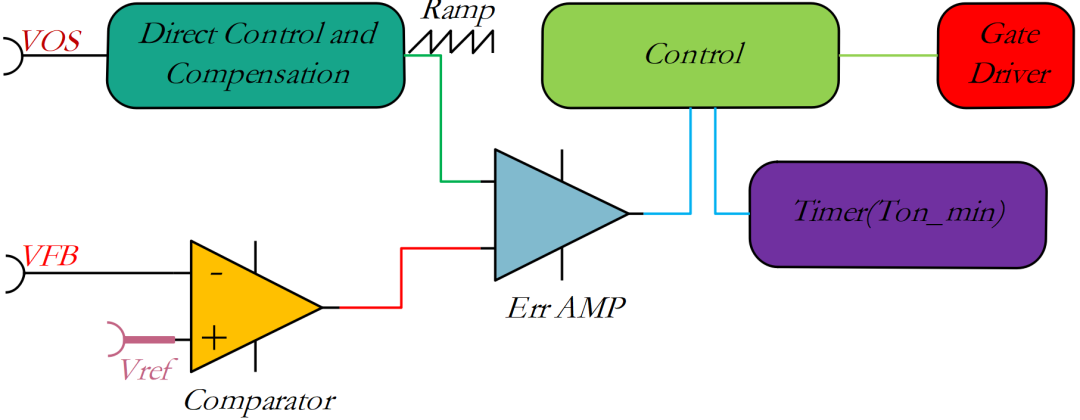
图10-10:DCS控制逻辑
-
DC-DC反馈电阻到底有哪些讲究?2025-03-17 1101
-
动态改变DC-DC反馈电阻,调整输出电压2023-10-12 4639
-
DC-DC的电压反馈控制模式2023-06-07 4255
-
DC-DC芯片的各种控制模式2023-04-19 11963
-
基于MAX1771 DC-DC控制器的开关模式电流源设计2023-03-17 1861
-
用于电流模式DC-DC转换器的统一LTspice AC模型2022-12-15 4756
-
XT3412 COT 架构 DC-DC 降压转换器2022-06-14 3607
-
适用于电流模式DC-DC转换器的统一的LTspice AC模型2022-02-09 3500
-
DC/DC电压反馈模式与电流反馈模式的区别2021-11-17 1009
-
DC-DC模块电源的反馈电路和设计方法2021-09-22 1602
-
DC-DC转换器中的COT是什么看来就知道2021-05-01 11391
-
基于单片机控制的DC-DC变换电路2018-10-18 2748
-
DC-DC工作原理2012-08-29 12866
全部0条评论

快来发表一下你的评论吧 !
