

扫地机器人停滞不前的原因是什么
机器人
描述
▍卖不动的扫地机器人,需要翻过价格和智能化两座大山。
卖不动的背后,原因是什么?
视角回到行业,随着基站型全功能扫地机器人的出现,机器人的产品力和使用体验得到明显提升,可以说已经能够极大程度的满足消费者的需求,但为什么扫地机器人并没有迎来“iphone时刻”,相反了还出现了销量下滑?
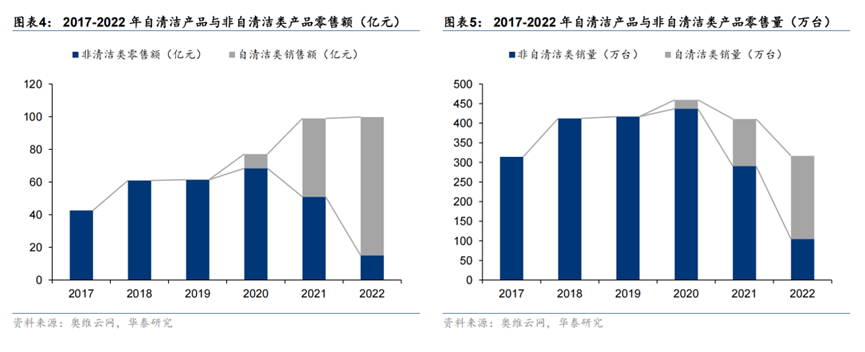
根据奥维云网统计,2022年,扫地机器人零售额微涨3.4%至124.1亿元,但销量却同比下降了23.8%。
从市场角度来看,一款产品要实现渗透率的阶层跨越,必须满足消费者对产品力的需求以及大众价格两个条件。一是只有足够好用的产品才会让消费者产生强烈的购买意愿;二是价格与心理预期和预算约束相匹配的产品才会使消费者完成购买行为。
通过深度分析,扫地机器人卖不动的原因也基本围绕在这几方面:
一方面价格上涨,消费紧缩。近2年,在堆料内卷之下,基站型全功能扫地机器人的价格正在连番上涨。根据奥维云网统计,截止2022年,扫地机器人线上、线下均价分别达3154元、4355元;线上线下均价2017-2022 年的年均复合增长率分别为18.99%、15.82%。头部品牌的旗舰款甚至冲破5000元大关,高价已经抑制了很大一部分市场需求。与此同时,在经济下行,消费普遍紧缩的当下,消费者产生购买行为的条件也更加苛刻。
不过随着各大厂商开启降价策略,并推出高性价比产品,如石头推出G10S,这一问题正在得到改善。
另一方面,消费者心理预期提升。根据扫地机器人5%的市场渗透率来看,扫地机器人依然属于小众化的早期市场,这个阶段的消费者特征表现为愿意尝试各种新鲜事物,对新事物有天然的好奇,他们对新产品具有更好的包容度,并且对该类产品的价格敏感度比较低。但随着产品不断向外渗透,外围层级的大众消费者对扫地机器人的好感度快速下降,会更加关注产品的实用性,即清洁能力和AI能力。同时随着智能化技术的发展,消费者对于产品的心理预期还在不断拔高,期望扫地机器人能像人一样工作,而不是一种劳动补充。然而不幸的是,清洁能力的进步十分明显,但AI能力却始终落后于需求。可以预见,未来的创新方向将聚焦于AI。
提升智能,需要从根本上革新
想象一下,未来接入大语言模型的扫地机器人,简单一句“检查一下厨房”,在大模型释义后,扫地机器人便可以在厨房自主检查卫生情况,并能根据脏污程度和类型,执行类人的智能化作业,这无疑是人们对机器人构想中的理想形态。
然而要真正实现这种非程式化的智能作业,前提却需要提升机器人的感知&认知能力,需要机器人不仅要能“看见”,还要能“看懂”,这就要求机器人需要有一颗“人”的眼睛。但现有的主流激光导航技术,却有着天然的技术缺陷。
由于激光雷达属性限制,点云无法区别纹理信息,不具备场景辨识能力,因此在智能决策和智能交互方面无法提供有效信息支持,智能拓展性不足。同时,作为高端产品专用的激光融合导航方案也同病相怜,虽然加入了视觉技术,但本身依然是基于谷歌Cartographer算法演进而成,仍由激光雷达完成建图、导航、定位等逻辑,视觉仅承担避障任务,本质没有发生改变。
或许大语言模型的接入还需要时间,但对于当下,提升认知&感知能力仍是必要。当激光雷达技术触及天花板,视觉技术自然而然走到了台前。视觉的天然优势可以从环境中获取海量的、富于冗余的纹理信息,且拥有强大的场景辨识能力,这为机器人现阶段实现智能避障、AI识别、智能作业、智能交互等提供了充分条件。
能够看到,随着一批批技术供应商加入视觉行列,一些成熟化的视觉解决方案已经在市面出现。
作为机器人产业链上游的AI技术供应商,INDEMIND已经在视觉导航方向深耕多年,在机器人的导航、避障、决策、AI交互等关键技术和产品开发方面有着深层次的积累和经验,并基于现有行业需求推出了一款纯视觉的家用机器人导航方案「家用机器人AIKit」,在机器人AI表现上达到了行业领先水平。
与市面上的激光雷达方案不同,「家用机器人AIKit」是以INDEMIND自研的INDEMINDOSLite家用机器人AGI系统为核心,搭配面向家用小型机器人专门研发的一体化立体视觉模组,可实现家用机器人导航定位、智能避障、路径规划、决策交互等核心功能,是包含软硬件的ALLIN ONE解决方案。
基于INDEMIND立体视觉技术上的优势,「家用机器人AI Kit」通过视觉SLAM联合双目稠密立体视觉可生成环境三维地图,同时结合语义识别,能够识别物体、人、动物及空间语义,并生成拥有空间感的三维语义地图,为上层决策提供丰富的数据支持。
为了进一步提升AI能力,INDEMIND专门研发了一套智能决策引擎,为机器人的底层逻辑及业务逻辑提供智能化的决策支持,实现感知—认知—决策—行动协调统一。基于决策引擎支持的避障功能,机器人可做出类人规避动作的精细化操作,能够让机器人有策略地实现智能避障 (如根据障碍物不同做出不同规避距离)。同时,在交互上,可通过语音、手势、动作等指令,命令机器人进行安全、搜寻、跟随、自主寻路、定向清扫等多种智能作业逻辑。以定向清扫为例,发布语音命令:“清扫一下客厅”可被识别为针对地图上识别到的客厅区域进行一次规划清扫。
此外,与激光融合方案这种做加法的方式不同,INDEMIND走通了一条轻量化路线,以双目纯视觉为基础,配合轻量化的算法和模型,以及独特的硬件加速技术,「家用机器人AI Kit」能够在几美金的计算平台上稳定运行建图、导航、避障、交互等任务逻辑,这无疑能够大大降低厂商们的量产成本。
值得一提的是,INDEMIND拥有超过100个使用场景的海量数据资源,加之AI决策策略上的领先性,在未来大语言模型的接入过程中,将有着极大的前瞻优势。
编辑:黄飞
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 10656
-
扫地机器人如何选购?2015-01-21 7889
-
扫地机器人方案2015-05-18 10668
-
【NanoPi2申请】扫地机器人2015-12-02 3613
-
原来扫地机器人是这样工作的!2015-12-24 31642
-
小米扫地机器人上手:家居能手2016-09-28 8367
-
扫地机器人怎么制作2017-01-12 7880
-
智能扫地机器人解决方案2017-05-27 8862
-
如何选择好的扫地机器人2018-08-20 4622
-
智能扫地机器人用什么马达2018-10-12 7092
-
扫地机器人自动回充的技术原理是什么2021-09-14 5629
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 2870
-
扫地机器人到底怎么样?2021-11-12 2591
-
扫地机器人有哪些功能2022-02-07 2018
-
电机驱动的扫地机器人介绍2022-11-09 2632
全部0条评论

快来发表一下你的评论吧 !
