

机器鱼胸鳍上下摆动功能的实现
电子说
1.4w人已加入
描述
1. 运动功能说明
本文示例将实现R330样机机器鱼胸鳍能够灵活的上下摆动的功能。

2. 结构说明
本样机采用舵机模块来进行仿生机器鱼结构的设计。
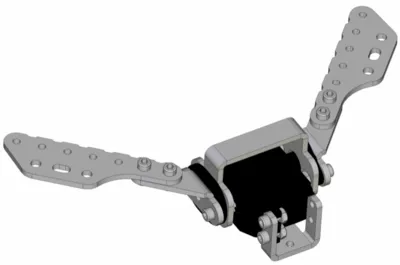 胸鳍
胸鳍 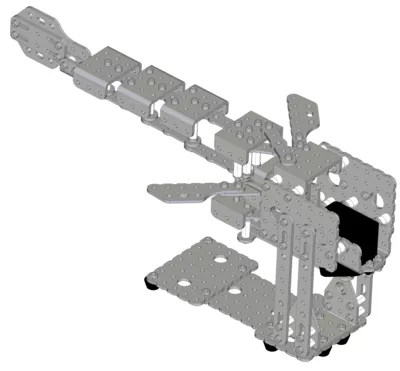 整机
整机
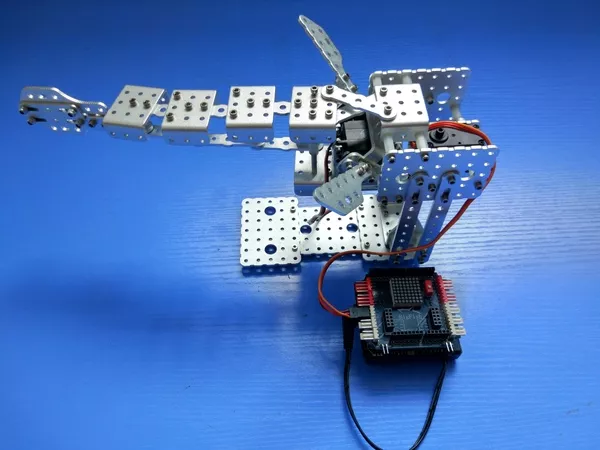
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
电路连接:将舵机连接在Bigfish扩展板的D4端口。
4. 运动功能实现
编程环境:Arduino 1.8.19
下面提供一个机器鱼胸鳍上下摆动的参考例程(fishQi.ino),例程源代码详见(https://www.robotway.com/h-col-236.html),实验效果可参考网站演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-23 https://www.robotway.com/
------------------------------*/
#include < Servo.h >
int _ABVAR_1_angle_current2 = 0 ;
int _ABVAR_2_num = 0 ;
Servo servo_pin_4;
int _ABVAR_3_angle_current1 = 0 ;
void up_down();
void down_up();
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
down_up();
up_down();
}
void down_up()
{
_ABVAR_1_angle_current2 = 30 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ )
{
_ABVAR_1_angle_current2 = ( _ABVAR_1_angle_current2 + 5 ) ;
servo_pin_4.write( _ABVAR_1_angle_current2 );
delay( 50 );
}
}
void up_down()
{
_ABVAR_3_angle_current1 = 110 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ )
{
_ABVAR_3_angle_current1 = ( _ABVAR_3_angle_current1 - 5 ) ;
servo_pin_4.write( _ABVAR_3_angle_current1 );
delay( 50 );
}
}
下面再给大家提供一个机器鱼鱼尾摆动的参考例程(fishTail.ino),大家可以尝试改写一下舵机摆动角度参数,让机器鱼尾能够灵活的摆动。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-23 https://www.robotway.com/
------------------------------*/
#include < Servo.h >
int _ABVAR_1_angle_right = 0 ;
int _ABVAR_2_num = 0 ;
Servo servo_pin_4;
int _ABVAR_3_angle_left = 0 ;
void Right_Left();
void left_Right();
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
left_Right();
Right_Left();
}
void Right_Left()
{
_ABVAR_1_angle_right = 70 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_1_angle_right = ( _ABVAR_1_angle_right + 5 ) ;
servo_pin_4.write( _ABVAR_1_angle_right );
delay( 100 );
}
}
void left_Right()
{
_ABVAR_3_angle_left = 110 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_3_angle_left = ( _ABVAR_3_angle_left - 5 ) ;
servo_pin_4.write( _ABVAR_3_angle_left );
delay( 100 );
}
}
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器鱼
-
电阻是如何实现上下拉功能的呢?2024-02-04 2557
-
机器人摆动相轨迹设计2023-11-22 1766
-
电阻上下拉功能实现原理详解2023-11-13 3743
-
电机如何实现左右摆动2023-09-08 5382
-
基于PIC单片机的仿生机器鱼的舵机控制2022-02-11 805
-
采用ARM芯片和LINUX嵌入式系统实现自主避障机器鱼的设计2018-11-02 5386
-
自动上下料机器人的特点2018-09-27 3957
-
接受在接地端以下摆动信号的交流耦合单电源放大器参考设计包括原理图,BOM及参考指南2018-08-17 2190
-
基于ARM-Linux的自主避障机器鱼设计2017-11-30 604
-
水中机器鱼程序解析2017-09-17 1473
-
水下摄影机器鱼2016-10-22 13034
-
自动驾驶汽车和机器人常用的激光雷达能做成芯片了2016-08-08 1404
-
图书上下架机器人机器手控制器设计与实现2015-12-23 568
-
看大神如何DIY机器鱼!!!小编已跪2015-11-18 11119
全部0条评论

快来发表一下你的评论吧 !
