

永磁同步电机电压反馈弱磁控制中电压环的分析
工业控制
描述
1 前言
永磁同步电机的弱磁控制主要由两种方式,一种是基于前馈的,一种是基于反馈的。前馈弱磁控制使用电机的精确参数建模,生成电机运行时的电流指令。这种方法响应速度快,但是成本较高。另一种是基于电压反馈的方法。电压反馈法使用逆变器的最大容许电压作为参考值,电流环输出的定子电压给定值作为反馈值,构建电压环来调节弱磁电流指令。电压反馈法虽然响应速度没有前馈法快,但是对电机参数不敏感,容易部署。
小编认为电压反馈法响应速度慢的原因主要有两点,一是电压环控制器参数的不合适,性能不理想;二是电压环控制器有超调,需要预留较大的电压裕量。针对这两个问题,一直有文献在推动解决。本文旨在与读者分享近几年电压反馈弱磁控制中针对电压环的研究成果,希望有需要的读者可以在这些文献的基础上进行进一步的探索。由于时间和精力所限,本文并没有进行详细深入的分析,如果有任何疑问,欢迎在西莫论坛中进行讨论。
2 电压弱磁控制原理

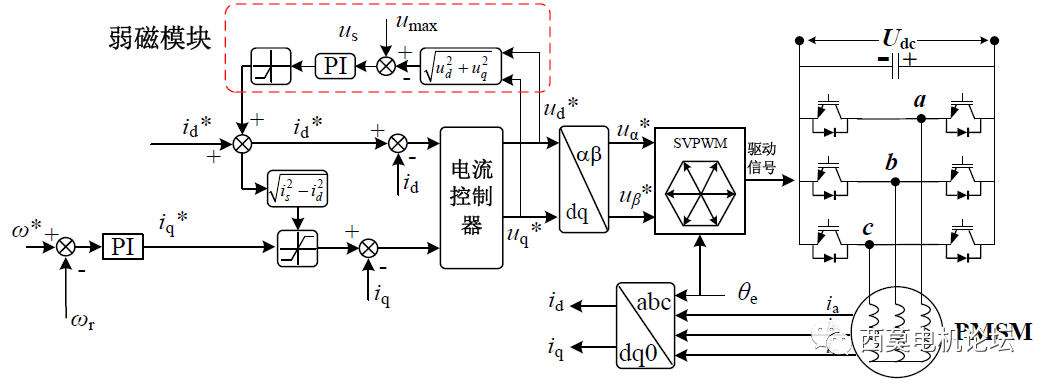
图1 电压反馈弱磁控制框图(id)
图2是直接调节电流矢量角。转速环输出了电流矢量的幅值。电压环输出了电流矢量角。两者经过计算可以得到所需的电流给定值。
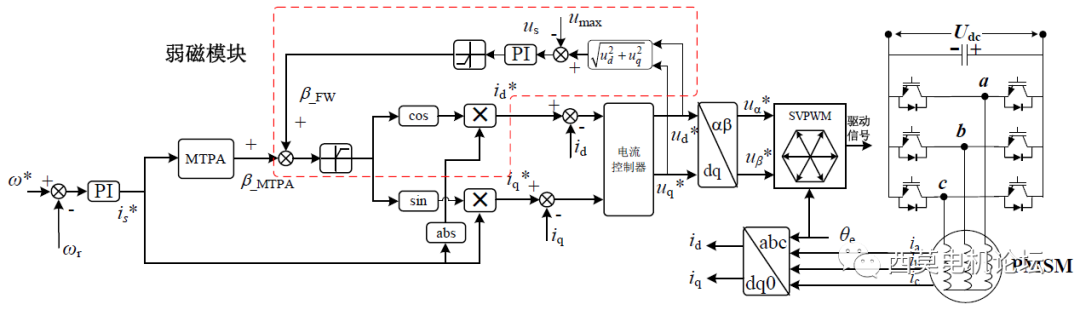 图2 电压反馈弱磁控制框图
图2 电压反馈弱磁控制框图
(电流矢量角)
3 电压环的增益自适应
图1和图2中电压反馈弱磁控制法存在的问题之一就是固定参数的PI控制器无法应对不同工作点处小信号模型变化导致的非线性。本节将分析不同工作点处小信号模型的变化,并介绍增益线性化的方法[2]。
永磁同步电机的电压方程为(1)。根据电压方程,我们可以计算得到定子电压的幅值为(2)。


由于角速度相对于电流变量是缓慢变化的,所以可以将定子电压幅值看作一个恒定分量加上一个由电流影响的变化分量。如

在弱磁过程中,定子电压幅值始终保持最大,因此, 。
。
对于定子电压幅值的变化分量,可以表示为 
式中,X可以为电流矢量角β,也可以为id。取决于弱磁控制变量的类型。
以电流矢量角β为例,
 利用
利用 和
和 ,结合(1)和(2)可得
,结合(1)和(2)可得

根据(6),结合第37期研讨会中给出的弱磁区电流工作点,可以得到如图所示的电压矢量小信号模型增益图如图。
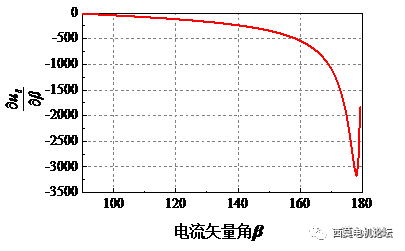
图3 不同电流矢量角对应的电压环小信号模型增益
可以看到,在不同电流矢量角(工作点)下,电压矢量和系统变量之间的小信号模型增益截然不同。说明弱磁区中电压环本身具有非常强的非线性特征。图3中有三种系统变量。其中,id的非线性最强。而β和iq的非线性稍微弱一点。当然,如果直接在电压环中使用一个PI控制器,显然是难以应对如此强的非线性的。因此,可以在电压环中增加一个增益补偿单元,从而使电压环的增益单位化,进而有利于PI控制器的部署。而式(6)中已经给出了增益的表达式。实际上,(6)可以简化为以下形式

因此,我们可以得到增益的补偿值为

4 电压环的传递函数
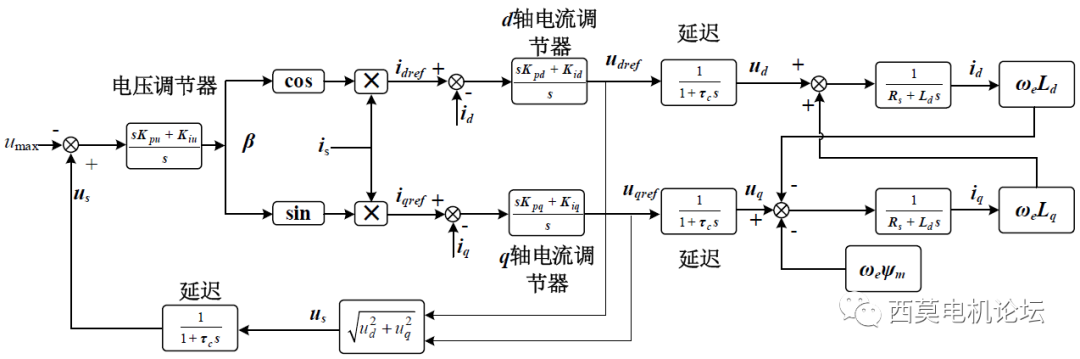
图4 电压反馈环路的结构框图
图4是电压环路的框图。通过该框图可以推导出电压环的开环传递函数Gvol。在Gvol里面,Ru是电压环的定子电压控制器。D是系统延迟。us比上β是从电流矢量角到定子电压us的传递函数。根据电压环的控制框图,电压环的开环传递函数为
 式中,电压环调节器
式中,电压环调节器
 系统延迟
系统延迟
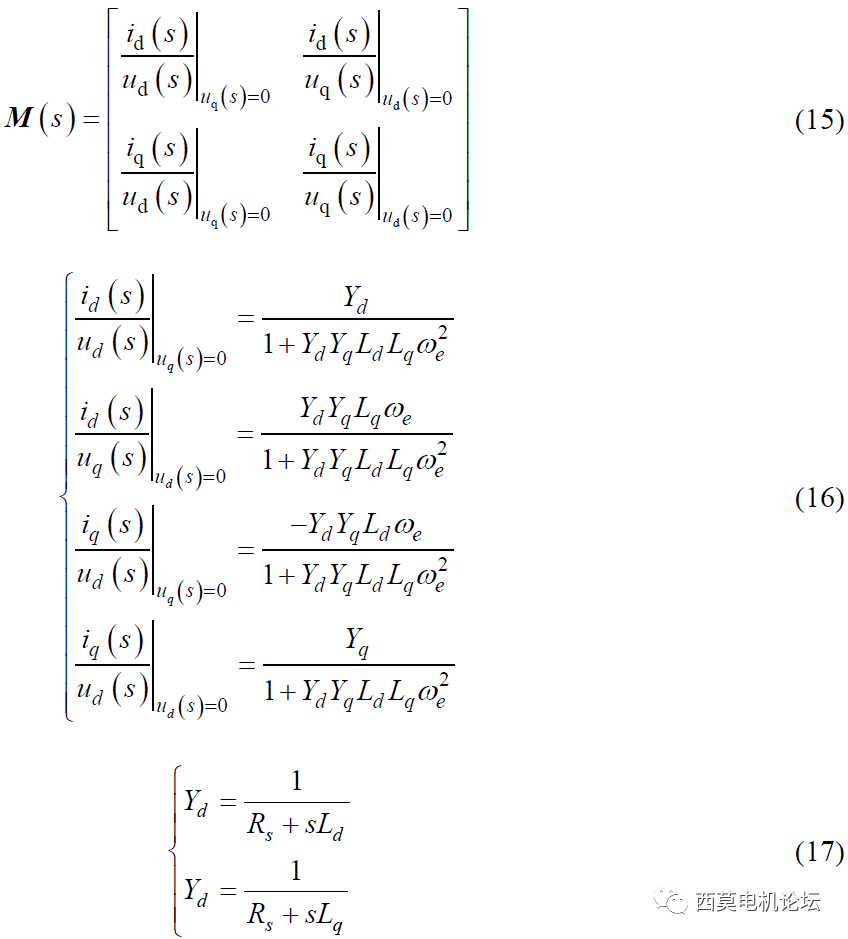
 电流矢量角到定子电压的传递函数
电流矢量角到定子电压的传递函数
 式中,电流调节器的传递函数
式中,电流调节器的传递函数
 电流环的传递函数
电流环的传递函数
 永磁同步电机的电气传递函数
永磁同步电机的电气传递函数
5 电压环传递函数的简化
上一节求取了电压环的传递函数,但是该传递函数非常复杂,无法有效指导电压环控制器参数的设计。这节会介绍电压环的简化设计方法[3,4]。
在电压环的自适应增益上,我们使用第2节的方法。但不同的是,该方法介绍的是定子电压幅值和id之间的传递函数,所以定子电压和id之间的小信号增益为
 由于Ud主要收iq的扰动影响,所以将Ud和iq之间的关系根据(19)进行替换,得到(20)
由于Ud主要收iq的扰动影响,所以将Ud和iq之间的关系根据(19)进行替换,得到(20)  在这里,需要处理iq和id之间的导数,考虑转矩不变时,iq和id之间的导数为
在这里,需要处理iq和id之间的导数,考虑转矩不变时,iq和id之间的导数为
 所以,结合(18)可得
所以,结合(18)可得  将(22)中的增益置于环路之中,则电压环可以表示为图5
将(22)中的增益置于环路之中,则电压环可以表示为图5
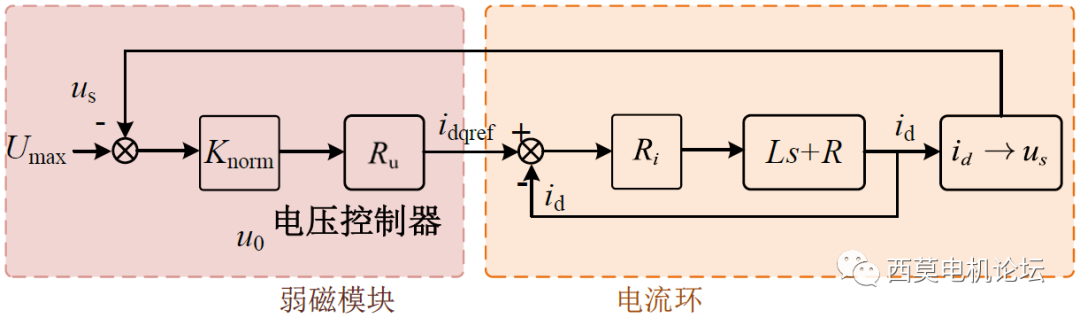
图5 电压环的框图
图中,加入电压环的增益线性化系数。通过这种方法,id到U在每个工作点的增益都被归一化。所以,图中id到U的增益与Knorm相互抵消,电压环的开环传递函数变为
 式中,电流环的闭环传递函数在假定电流环控制器Ri参数理想化的情况下已经被简化,α是电流环的带宽。
式中,电流环的闭环传递函数在假定电流环控制器Ri参数理想化的情况下已经被简化,α是电流环的带宽。
这样,剩下的工作就是配置电压环的PI参数,Kvp和Kvi。这里使用零极点对消的方法对传递函数进行调整。从(23)可以得到,  则电压环的开环传函变为
则电压环的开环传函变为  从(25)可知,电压环的带宽为
从(25)可知,电压环的带宽为 
最后的工作就是电压环的带宽的确定。由于电压环需要比转速更快的响应速度,但又由于电压环控制器输出的是id的给定值,所以电流环的响应速度应该比电压环慢。总之,电压环的带宽需要在电流环带宽和转速环带宽之间。一般的,可以取电压环带宽为电流环的一半。更具体的,包括电压裕量、电压跌落,都是在设置带宽时需要考虑的因素。这些文献[3]中进行了详细分析。
审核编辑:刘清
-
基于电压反馈的永磁同步电机弱磁控制分析2023-06-12 3717
-
永磁同步电机的矢量控制策略之弱磁控制2023-03-14 1608
-
怎样去实现永磁同步电机的弱磁控制呢2021-10-14 5592
-
永磁同步电机电流环与转速环的等效模型2021-09-30 3006
-
永磁同步电机电机本体数学模型在MATLAB下的仿真2021-08-27 1880
-
永磁同步电机矢量控制原理2021-07-12 1903
-
永磁同步电机矢量控制——弱磁控制2019-10-31 8481
-
电动汽车如何使用永磁同步电机弱磁控制的详细资料免费下载2018-08-09 2324
-
混合式永磁同步电机弱磁性能研究2018-03-05 1344
-
车用永磁同步电机如何实现高速2017-08-19 4837
-
内置式永磁同步电机弱磁过渡时的解耦补偿控制_毛亮亮2017-01-08 915
-
PWM控制永磁同步电机电压偏差下的损耗研究2017-01-05 952
-
电主轴永磁同步电机的弱磁过程研究2016-05-04 582
全部0条评论

快来发表一下你的评论吧 !
