

采用MAX2769的GPS USB参考设计
描述
重要设计特点
与地理软件配对时的完整 USB 解决方案
MAX2769提供1.4dB级联噪声系数和115dB增益,AGC范围为60dB
接收器/软件组合提供 -139dBm 采集灵敏度和 -152dBm 跟踪灵敏度
可选择两种 LNA,用于有源或无源天线
可选择单频或双频基准
小数N分频频率合成器和各种IF滤波器,可实现最大的灵活性
用于抗噪性的SAW滤波器
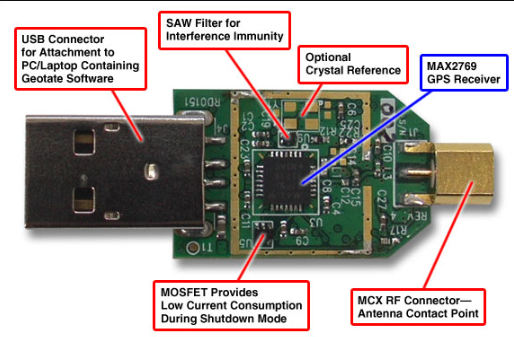
图1.采用MAX2769通用GPS接收器的GPS参考设计俯视图
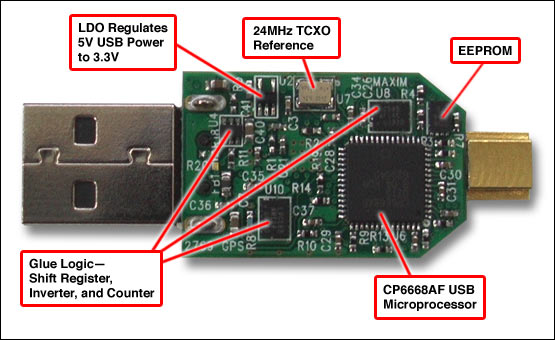
图2.设计板底视图
图3.全球定位系统USB参考设计框图
实验室测量
| 参数 | 测试条件 | 测量 | 单位 |
| 连续电流 | 单元跟踪卫星 | 64 | 但 |
| 关断电流 | 用于数字电路的独立晶体基准电压源 | 0.5 | 但 |
| 关断电流 | 单个TCXO参考 | 2.5 | 但 |
| 参数 | 测试条件 | 测量 | 单位 |
| 采集灵敏度1 | < 冷启动条件下首次修复的平均时间为 150 秒(年历但没有卫星位置信息) | -139 | 电子提单 |
| 跟踪灵敏度1 | 保持间歇性轨道 >1 分钟 | -152 | 电子提单 |
| 平均采集时间 | 冷启动2 | 30 | 秒 |
| 平均采集时间 | 热启动2 | 5 | 秒 |
| 平均采集时间 | 热启动2 | 2 | 秒 |
| 位置精度 | 水平 | 3 | m |
| 位置精度 | 垂直 | 6 | m |
带无源天线的 LNA1,或带有源天线的 LNA2,噪声系数为 1.5dB,增益> 20dB。
输入功率 = -130dBm;冷启动:年鉴,但没有卫星信息;热启动:年鉴和最近的卫星位置信息;热启动:瞬间丢失信号后重新启动。
图4.数据显示在冷启动条件下首次修复的时间。在高级别,平均定位时间为 30 秒。在灵敏度水平以上2dB时,定位时间约为50秒。灵敏度级别定义为固定时间超过 150 秒的入射功率
详细说明
MAX2769提供两种不同的集成LNA选择。LNA1具有更高的增益和更低的噪声系数,可与无源天线配合使用;LNA2 提供更高的 IP3 和更低的功耗,但代价是增益略低,噪声系数较高。LNA2 适用于有源外部天线。引脚布局允许在LNA输出和混频器输入之间使用外部GPS带滤波器。参考频率和IF频率都是可变的,可以匹配各种频率计划。I和Q通道选择滤波器涵盖宽带宽范围,可选择三阶或五阶。通过这种方式,基带处理器可以调整(或固定)所需的通道带宽以获得最佳灵敏度。片内小数N分频频率合成器借助外部环路滤波器进行调谐,可提供高IF选择性和低相位噪声。IF输出可在63MHz至0.12MHz之间以5级调节。集成ADC可设置为1位、2位或3位分辨率。
此参考设计利用 1 位数据,将 L1 频段 1575.42GHz GPS(或伽利略)信号下变频至 1.57MHz IF。USB 微处理器和胶水逻辑提供与 PC 或笔记本电脑的完整 USB 接口。该设计使用安装在PCCPU上的Geotate的“Spot”软件进行操作。虽然该设计采用24MHz的单个TCXO基准,但它可以使用数字和RF部分的单独基准工作,从而允许在需要时使用不同的RF基准。客户可以在两个LNA之间进行选择,只需更改软件版本并更换电路板上的一个电容器。LNA之后包括一个SAW滤波器,以实现抗噪性。该系统也可以通过更换SAW滤波器和更改软件版本来重新调整GLONASS操作。设置IC所需的SPI信息通过USB线路传输,并在微处理器中转换为IC所需的3信号格式。PID/VID 信息以及启动时对设置进行编程的必要信息通过板上的 EEPROM 加载。
胶合逻辑既用于将IC的串行数据输出转换为微处理器的并行格式,也用于调整时钟时序。然后,微处理器将信息转换为DP和DM信号,以便通过USB电缆传输到PC处理器。此时,Spot 软件将信号转换为纬度、经度和高度信息。Spot软件使用户能够观察卫星和信号强度信息、年鉴信息、首次定位时间和位置信息。
审核编辑:郭婷
-
探索MAX2769:通用GPS接收器的卓越性能与应用潜力2026-05-07 187
-
MAX2769ETI是否可以替换MAX2771ETI的问题2025-09-29 1088
-
MAX2769 GPS参考设计2023-06-12 1855
-
通用GPS接收器可让您使用笔记本电脑进行软基带处理2023-03-08 3052
-
如何借助通用GPS RF前端实现软件基带处理?2019-08-22 2642
-
max2769b通用GPS接收机2017-09-26 1153
-
MAX2769 GPS接收机用户指南2017-04-06 1366
-
MAX2769 GPS接收机用户指南 - 用户指南 - Maxi2016-05-18 1010
-
MAX2769B中文版手册2012-07-16 3061
-
maxim推出通用型支持GLONASS的GPS接收机MAX2769B2011-09-11 3600
-
基于MAX2769设计的全球导航卫星系统(GNSS)接收方案2010-07-20 5315
-
膝上型PC借助通用GPS RF前端实现软件基带处理2009-12-10 882
-
MAX2769/MAX2659单芯片GNSS接收器2008-09-01 1998
-
MAX2769 pdf datasheet (通用的GPS接2008-08-18 1941
全部0条评论

快来发表一下你的评论吧 !
