

飞行器姿态计算
电子说
1.4w人已加入
描述
在飞行器的控制中,姿态计算是至关重要的一步。姿态计算的目标是确定飞行器相对于参考坐标系的姿态,通常以欧拉角(滚转、俯仰和偏航)或四元数的形式表示。
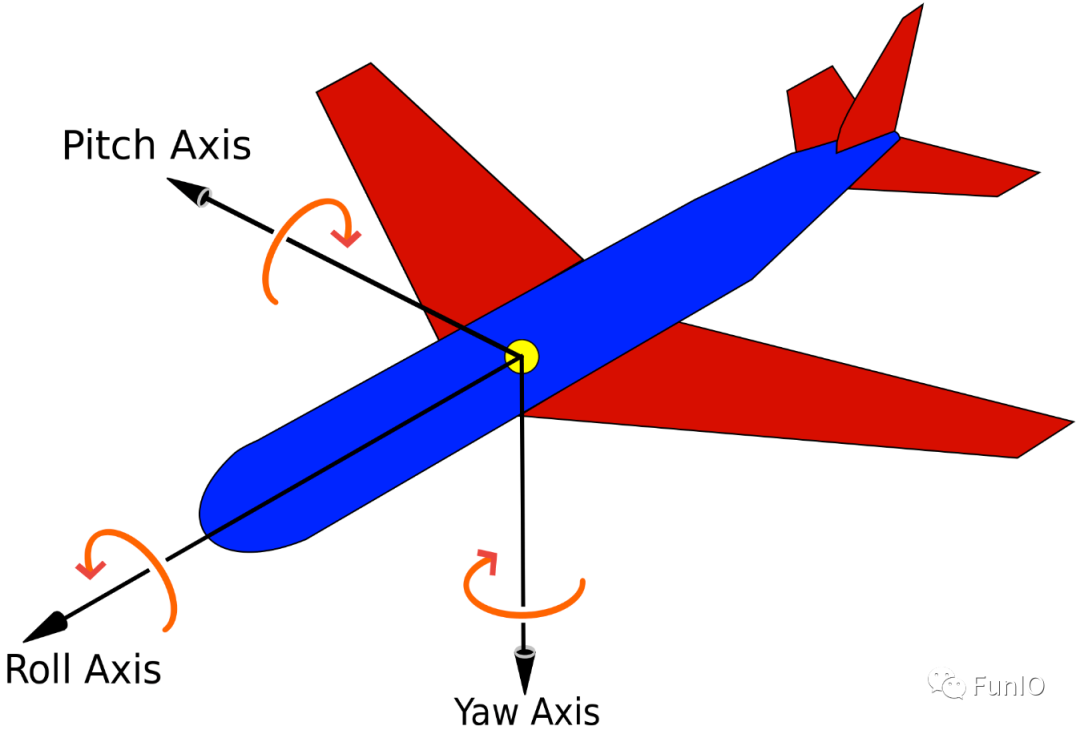
欧拉角
以下是姿态计算的原理和常用方法的简要介绍:
原理: 姿态计算基于惯性测量单元(IMU),其中包括加速度计和陀螺仪。加速度计测量物体在三个轴向上的加速度,而陀螺仪测量物体绕三个轴向上的角速度。通过结合这些测量值,可以推导出飞行器的姿态。
常用方法:
- 互补滤波器(Complementary Filter):这是一种简单且常用的姿态计算方法。它基于加速度计和陀螺仪的数据,通过加权平均来结合它们的优点。具体而言,加速度计用于低频信号(如重力)的测量,而陀螺仪用于高频信号(如旋转)的测量。通过调整加速度计和陀螺仪的权重,可以获得相对稳定的姿态估计。
- 卡尔曼滤波器(Kalman Filter):卡尔曼滤波器是一种更复杂但更精确的姿态估计方法。它基于状态估计和观测模型,并通过递归处理将测量数据与系统模型相结合。卡尔曼滤波器考虑了测量误差、系统噪声和先验信息,并通过最小化均方误差来优化姿态估计结果。这种方法对于高精度的姿态计算非常有效,但需要更复杂的数学推导和实现。
对于使用 MPU6050 作为传感器的实际案例,以下是一个简单的示例代码,演示如何使用 MPU6050 进行姿态计算:
import smbus
import math
# MPU6050的I2C地址
MPU6050_ADDR = 0x68
# 加速度计的灵敏度,根据MPU6050配置进行选择
ACCEL_SCALE = 16384.0
# 陀螺仪的灵敏度,根据MPU6050配置进行选择
GYRO_SCALE = 131.0
# 初始化I2C总线
bus = smbus.SMBus(1)
# 启动MPU6050传感器
bus.write_byte_data(MPU6050_ADDR, 0x6B, 0)
# 读取加速度计原始数据
def read_accel_data(addr):
raw_data = bus.read_i2c_block_data(MPU6050_ADDR, addr, 6)
accel_x = (raw_data[0] < < 8) + raw_data[1]
accel_y = (raw_data[2] < < 8) + raw_data[3]
accel_z = (raw_data[4] < < 8) + raw_data[5]
return (accel_x, accel_y, accel_z)
# 读取陀螺仪原始数据
def read_gyro_data(addr):
raw_data = bus.read_i2c_block_data(MPU6050_ADDR, addr, 6)
gyro_x = (raw_data[0] < < 8) + raw_data[1]
gyro_y = (raw_data[2] < < 8) + raw_data[3]
gyro_z = (raw_data[4] < < 8) + raw_data[5]
return (gyro_x, gyro_y, gyro_z)
# 计算加速度计的姿态
def calculate_accel_angles(accel_x, accel_y, accel_z):
roll = math.atan2(accel_y, accel_z) * 180 / math.pi
pitch = math.atan2(-accel_x, math.sqrt(accel_y * accel_y + accel_z * accel_z)) * 180 / math.pi
return (roll, pitch)
# 计算陀螺仪的姿态
def calculate_gyro_angles(gyro_x, gyro_y, gyro_z, dt):
roll = gyro_x * dt
pitch = gyro_y * dt
yaw = gyro_z * dt
return (roll, pitch, yaw)
# 主循环
while True:
# 读取加速度计数据
accel_data = read_accel_data(0x3B)
accel_x = accel_data[0] / ACCEL_SCALE
accel_y = accel_data[1] / ACCEL_SCALE
accel_z = accel_data[2] / ACCEL_SCALE
# 读取陀螺仪数据
gyro_data = read_gyro_data(0x43)
gyro_x = gyro_data[0] / GYRO_SCALE
gyro_y = gyro_data[1] / GYRO_SCALE
gyro_z = gyro_data[2] / GYRO_SCALE
# 计算加速度计的姿态
accel_angles = calculate_accel_angles(accel_x, accel_y, accel_z)
# 计算陀螺仪的姿态
gyro_angles = calculate_gyro_angles(gyro_x, gyro_y, gyro_z, dt)
# 结合加速度计和陀螺仪的姿态,使用互补滤波器或其他方法进行姿态计算
# 输出姿态信息
print("Roll: %.2f" % roll)
print("Pitch: %.2f" % pitch)
print("Yaw: %.2f" % yaw)