

 Protues教程第二讲:动态数码管
Protues教程第二讲:动态数码管
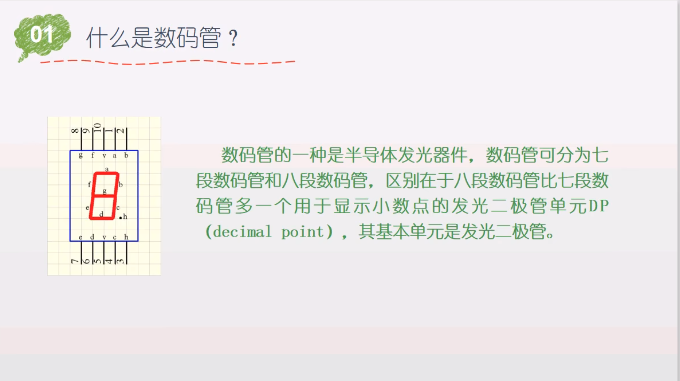
描述
视频教程:https://www.bilibili.com/video/BV1gJ411a7iN
/* 超声波模块的TRIG管脚接在单片机的P20口,ECHO管脚接在单片机的P21口 其他的电源管脚接在单片机
开发板上电源口即可。 */
#include"reg51.h"
#include < intrins.h >
#define uchar unsigned char
#define uint unsigned int
#define GPIO_KEY P1
uchar KeyValue; //用来存放读取到的键值
sbit RX=P2^1;
sbit TX=P2^0;
unsigned int time=0;
unsigned int timer=0;
unsigned char posit=0;
unsigned int DIstance;
unsigned long S=0;
bit flag =0;
//--定义使用的IO--//
#define GPIO_DIG P0
sbit BEEP = P2^5;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
uchar flag_X;
uchar flag_wei;
uchar flag_buff[3];
unsigned int Set_dis=80;
uchar number;
uchar dat;
//--定义全局变量--//
uchar code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//显示0~F的值
//0、1、2、3、4、5、6、7、8、9、A、b、C、d、E、F的显示码
unsigned char disbuff[4] ={ 0,0,0,0,};
unsigned char timm;
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(uint i)
{
while(i--);
}
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S= (long)(time*0.17); //算出来是CM
DIstance = S;
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void zd3() interrupt 3 //T1中断用来扫描数码管和计800MS启动模块
{
TH1=0XFC; //给定时器赋初值,定时1ms TH1
TL1=0X18; //TL1
dat++;
if(dat==2)
{
dat = 0;
//GPIO_DIG=0x00;//消隐
switch(number) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; GPIO_DIG=smgduan[DIstance%10/1];break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; GPIO_DIG=smgduan[DIstance%100/10];break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; GPIO_DIG=smgduan[DIstance%1000/100];break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; GPIO_DIG=smgduan[DIstance%10000/1000];break;//显示第3位
case(4):
LSA=0;LSB=0;LSC=1; GPIO_DIG=smgduan[0];break;//显示第4位
case(5):
LSA=1;LSB=0;LSC=1; GPIO_DIG=smgduan[flag_buff[2]];break;//显示第5位
case(6):
LSA=0;LSB=1;LSC=1; GPIO_DIG=smgduan[flag_buff[1]];break;//显示第6位
case(7):
LSA=1;LSB=1;LSC=1; GPIO_DIG=smgduan[flag_buff[0]];break;//显示第7位
}
number++;
if(number >7)number=0;
}
}
/*********************************************************/
/*******************************************************************************
* 函 数 名 : KeyDown
* 函数功能 : 检测有按键按下并读取键值
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void KeyDown(void)
{
char a=0;
GPIO_KEY=0x0f;
if(GPIO_KEY!=0x0f)//读取按键是否按下
{
delay(1000);//延时10ms进行消抖
if(GPIO_KEY!=0x0f)//再次检测键盘是否按下
{
//测试列
GPIO_KEY=0X0F;
switch(GPIO_KEY)
{
case(0X07): KeyValue=0;break;
case(0X0b): KeyValue=1;break;
case(0X0d): KeyValue=2;break;
case(0X0e): KeyValue=3;break;
}
//测试行
GPIO_KEY=0XF0;
switch(GPIO_KEY)
{
case(0X70): KeyValue=KeyValue;break;
case(0Xb0): KeyValue=KeyValue+4;break;
case(0Xd0): KeyValue=KeyValue+8;break;
case(0Xe0): KeyValue=KeyValue+12;break;
}
while((a< 50)&&(GPIO_KEY!=0xf0)) //检测按键松手检测
{
delay(1000);
a++;
switch(KeyValue)
{
case 3:BEEP = 0;break;
case 7:BEEP = 0;break;
case 11:BEEP = 0;break;
case 13:BEEP = 0;break;
case 14:BEEP = 0;break;
}
}
switch(KeyValue)
{
case 0:flag_buff[flag_wei] = 1;flag_wei++;break;
case 1:flag_buff[flag_wei] = 2;flag_wei++;break;
case 2:flag_buff[flag_wei] = 3;flag_wei++;break;
case 3:break;
case 4:flag_buff[flag_wei] = 4;flag_wei++;break;
case 5:flag_buff[flag_wei] = 5;flag_wei++;break;
case 6:flag_buff[flag_wei] = 6;flag_wei++;break;
case 7:break;
case 8:flag_buff[flag_wei] = 7;flag_wei++;break;
case 9:flag_buff[flag_wei] = 8;flag_wei++;break;
case 10:flag_buff[flag_wei] = 9;flag_wei++;break;
case 11:break;
case 12:flag_buff[flag_wei] = 0;flag_wei++;break;
case 13:break;
case 14:break;
case 15:
if(flag_X==0)
{
flag_X = 1;
flag_wei = 0;
}else
{
flag_X = 0;
Set_dis = flag_buff[0] * 100 + flag_buff[1] * 10 + flag_buff[2];
}break;
}
}
}
}
void StartModule() //启动模块
{
TX=1; //启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
void main( void )
{
TMOD=0x11; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
TH1=0XFC; //给定时器赋初值,定时1ms TH1
TL1=0X18; //TL1
ET0=1; //允许T0中断
ET1=1; //允许T1中断
TR1=1; //开启定时器
EA=1; //开启总中断
while(1)
{
timm++;
if(timm==200)
{
timm=0;
StartModule();
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
}
if(Set_dis< DIstance)
{
BEEP = 1;
}else
{
BEEP = 0;
}
KeyDown();
delay(100);
}
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
动态数码管显示原理详解2023-11-10 7687
-
数码管动态显示2012-08-27 8478
-
关于数码管的protues问题2013-07-04 4116
-
LED数码管循环移位显示如何去完成呢2021-11-18 1962
-
数码管的动态显示原理是什么2021-12-08 1268
-
动态数码管与静态数码管介绍2022-01-24 1691
-
数码管动态扫描电路2008-05-22 7696
-
动态数码管显示技术2009-11-06 1290
-
数码管(动态显示)【C语言版】2015-12-29 897
-
动态数码管显示程序2016-01-12 1245
-
MIN数码管动态显示2016-05-03 828
-
动态数码管2016-05-09 1166
-
数码管动态显示的原理概述2019-11-04 9570
-
基于单片机的LED数码管循环移位显示2021-11-11 1561
-
静态数码管和动态数码管2022-01-12 2443
全部0条评论

快来发表一下你的评论吧 !
