

解决不完的Corner Case
描述
在成本压力面前,什么可以被放弃,什么不可以?
我从没有想过辅助驾驶这个词会与降本增效联系在一起。
高阶辅助驾驶, 天然与高成本绑定,大算力芯片加上高性能传感器带来的硬件成本, 算法人才的价格带来的极高研发成本。
这都意味着大量投入。
但是在更高级别无人驾驶迟迟未能落地的今天,车企内卷堆料没有带来真正用户体验明显提升,也就无法成为影响用户选择的主要因素。
这都让车企对辅助驾驶的投入变得更加谨慎,面对内卷的态势, 砍成本, 但是不砍功能成了现在车企面对辅助驾驶时的态度。
那什么是可以被放弃的,什么不可以?
01
激光雷达
如果目标不是 L4,你还有意义吗?
一年前知乎上还有纯视觉和多传感器融合的争论,现在这个时间节点大家似乎都已经习惯了,纯视觉和感知融合的并行结果。
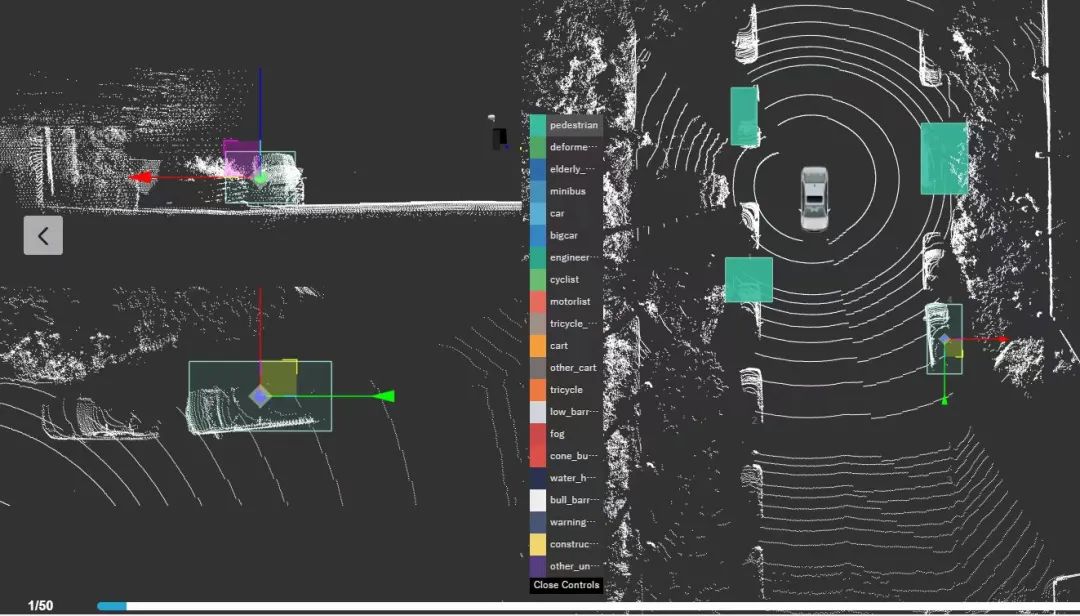
毋庸置疑,多传感器融合的上限确实比纯视觉的上限要高,自动驾驶要求的全场景面对恶劣天气的足够鲁棒性, 例如光照不足时稳定的环境感知,摄像头的被动感知特性决定了对天气的敏感程度。
而激光雷达作为主动传感器,能够在光照不足时,保证高质量的感知结果,也能提供通用障碍物的检测结果。
但是这就是全部了。
激光雷达点云对物体类别天然劣势,决定了激光雷达无法完全取代摄像头。
而激光雷达带来的效用却没有让更高级别的辅助驾驶更快到来,不确定性依然存在,鬼影,噪点等等都在嘲笑过度乐观的工程师们。
而量产固态雷达们在成本妥协之后,带来的硬件缺陷也再一次困扰着算法工程师们。
所以两年前大干快上激光雷达的量产车,实际上也只是在传统的 L2 功能下高权重使用了激光雷达的点云结果。
比如 AEB。
「可有意思的是,AEB 的结果很多家还无法与纯视觉的 Mobileye 抗衡」。这是某大厂智驾测试工程师所说。

加上激光雷达后,多一个城区辅助驾驶场景,再多一个责任归属都是驾驶人的说辞。 这似乎无法成为购买决策最重要的原因。
回过头看,关于蔚小理三家,小鹏入局最早,发布功能也最多,激光雷达的能力也确实被有效利用了,城市辅助驾驶的能力也独树一帜,可是这暂时都没有带来实际的业绩提升。
蔚来激光雷达量产发布最早,可惜智驾积累不如小鹏,暂时没有证明激光雷达版本车型比自家上一代方案功能有质的飞跃。
如果主打智驾功能领先的 G6 能打一个漂亮的翻身仗的话,激光雷达的重要性会被重新确认,相反则是激光雷达市场的另一个景象。
但是无激光雷达的智驾方案也并未落入下乘,特斯拉FSD的表现和低成本足以让车企们停下脚步冷静思考其必要性。
当成本压力倒逼车企推出无激光雷达版本车型,激光雷达最后成为了高配车型一个补盲或者距离确认的器件的话,意义在何处?
如果有一天,激光雷达成为智驾非标配硬件的话,整体出货预期暴跌,禾赛们接下来的业绩如何兑现?
02
高精地图
你很好,但是也决定了算法的上限。
也许图商没有想过,自己成为鸡肋的一天会来的如此快。
高精度地图的绘制方式决定了上限,频繁更新的道路界面是带来了天然的不确定性, 并且地图绘制时也无法保证完全没有错漏。
实际上,在以往高速导航辅助驾驶中出的很多问题都可以归因到高精度地图上,定位不准,或者画线不准确常常会造成误打方向,而这些都会被一句:「高速导航辅助驾驶不是自动驾驶,请时刻保持注意力驾驶」一笔带过。
在高精地图没有更新前,这里的 bug 只能靠又一个 if else 解除。
而没有高精地图的地区只能降级,也限制了很多地区的使用,最后都会表现在产品的销量上,只靠北上广深的用户,销量再好也难以存活。
还有一点,高精度地图初始化定位的时间与 GPS 信号强相关,这在信号不好的位置,又成为了另一个无法被解决的瓶颈。
这让行泊一体方案更加难以推进。
于是众多公司开始放出轻地图方案,众包建图,实时建图不一而足,努力降低对高精度地图的依赖,进而节省成本。
一个一级城市千万级的费用,没有车企不想节省。
03
数据标注
实在是太贵了。
今年众多公司都在说 BEV + Transformer 方案上车,理想小鹏蔚来,一个都没有落下,可以提供 360 感知能力的的 BEV 网络让城市导航辅助驾驶成为可能。
但是不可忽略的一点是,之前的积累的数据失效了。
之前的 2D 框的标注用于做检测,然后再确认 3D 位置的方式与 BEV 差异极大。
「是的,一切重新开始。」某车企感知数据负责人无奈表示。
对于多个摄像头共同确认距离和位置的方案来看,也就是说,某个图像上的标注框不再是重点,而是对应 3D 世界的位置。很多方案里不仅加入空间信息,也加入时序信息,也就是要求稳定的 3D 位置跟踪。
这种标注难度不可同日而语。
数据重新积累加上数据标注难度提升,成本压力更大。这让一些体量较小的智能驾驶公司被 BEV 拒之门外,也几乎提前拿到了被高阶辅助驾驶淘汰的通知书。
特斯拉用多达千人的标注团队和自动标注产线为后来者提供了参考,于是国内我们逐渐看到一些类似的宣传,这些都可归因给数据标注成本。
而这已经不是算法的范畴了,而是车企数字基建的范畴。
04
解决不完的 Corner Case
看不到的曙光。
我们期待今年各大车企下半年城市辅助驾驶的大量推送,但是同时也非常恐慌。
城市辅助驾驶比高速辅助驾驶难太多,城市里的交通状况复杂程度难以预料,等待车企的是事故处理还是荣耀加身可能也只是一念之间。
众多奇形怪状的车辆和突然冲出来的交通参与者,这些都会放大各家的 Corner case 待解决池。
测试和修复工程师的工作量会被不断加大,这些工作量都是成本。
从车端回流的众多异常数据放在云端,数据如何保存和处理,是金矿还是垃圾堆?需要数据挖掘团队来回答。可惜,这个问题没有标准答案。
如何提高 Corner Case 的解决效率,如何从一个点发掘到一个具象泛化的场景。
曾经与一个感知算法工程师聊过一个非常有意思的场景:一个红色的气球刚好飘到了十字路口中间,算法将其识别成了红灯,造成了车辆异常通行。
这个问题如何解决,采类似的数据(且不论采集难度)训练一遍,解决了红色的气球场景,但是绿色的气球可能并不意味着被解决。
这不是合理的迭代方式,特斯拉也做过了示范,用合成数据可以解决这个问题, 例如 Tesla AI Day 上用一家三口在高速上奔跑的合成数据解决了某些场景问题。
这是值得学习的降本策略。
(这里应该讲 特斯拉的合成数据,怎么做的,解决了什么?然后在推导出观点)
写在最后
参考答案,摸着特斯拉过河
现在回过头看, 关于纯视觉和激光雷达的多传感器融合的争论虽然还没有定论。
特斯拉为首的视觉派却在降本上先得一筹, 毕竟高精度传感器的配置似乎并没有让高阶辅助驾驶来的更快, 也没有获得实质性胜利。
而特斯拉靠着自己长久没有大改的传感器方案在一直进行着优化,如此长的时间有这样的方案定力,这很不容易。
还有很重要的一点,他们的数据是一直有高价值的。 自动化数据产线到现在也一直在努力进行迭代,合成数据也在逐渐为他们提供更多数据泛化的能力。
高阶辅助驾驶价值被重估的现在, 也许我们十年也看不到 L4 级别的自动驾驶的到来。
车企逐渐内卷,用牺牲利润的方式换取市场大环境下,自动驾驶开发如何从大鸣大放到细水长流,是一个非常值得思考的话题。
毕竟在汽车行业, 压缩成本的能力可能比什么都重要。
-
IBIS模型中的Corner参数处理2025-04-23 1557
-
oracle case when 语法介绍2023-12-06 3965
-
芯片后端signoff的RC corner指什么?2023-12-05 3773
-
java switch case的语法规则2023-11-30 4275
-
Switch case中的case顺序2023-11-20 1880
-
CASE:创建多路分支2023-06-27 1977
-
UltraEM®的Corner Sweep仿真实例2023-06-19 2482
-
RC Corner基础知识详细讲解2023-06-11 10798
-
FPGA中的fast corner和slow corner介绍2023-05-05 3334
-
玻璃反光也能误识别?当自动驾驶遇到千奇百怪的corner case2022-10-19 5741
-
用ADE XLall跑all Corner时 第一个Corner为什么总是会报错?2021-06-25 3223
-
verilog中if与case语句不完整产生锁存器的原因分析2017-09-16 1989
-
布线设计时,怎么解决不同电压域的问题?2015-05-07 7888
全部0条评论

快来发表一下你的评论吧 !
