

diy遥控飞机模型的基本要点-舵机
控制/MCU
描述
舵机
舵机是一种用于控制机械运动的设备,广泛应用于遥控模型、机器人、无人机等系统中。本文简要介绍舵机的基本知识:
定义和工作原理
舵机是一种电动装置,通过接收控制信号来控制输出轴的角度位置,从而实现精确的运动控制。
其原理也比较简单,就是通过位置反馈建立闭环控制,使输出轴位置可以固定在一个精确的角度。
结构组成
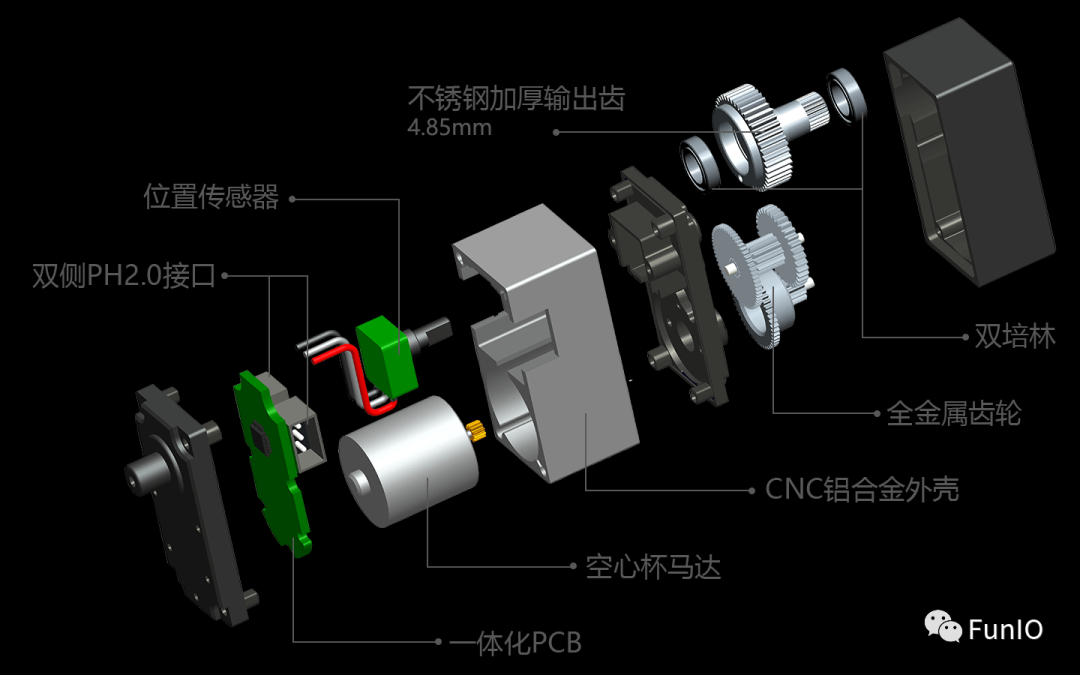
舵机内部结构
舵机是一种用于控制机械运动的装置,由多个组成部分组合而成。下面详细讲解舵机的组成和结构:
- 电机(Motor):
- 舵机的核心部件是电机,通常采用直流无刷电机或有刷电机。
- 电机负责提供动力,驱动输出轴进行旋转运动。
- 减速装置(Gearbox):
- 减速装置用于减小电机输出的高速转动,并提供足够的扭矩。
- 通常采用齿轮传动系统,通过齿轮的减速比来降低转速并增加扭矩。
- 减速装置的设计决定了舵机的扭矩输出和运动精度。
- 控制电路(Control Circuitry):
- 控制电路是舵机的核心控制单元,接收来自遥控器或控制系统的控制信号。
- 控制电路负责解析和处理控制信号,并根据信号确定电机驱动的转动角度。
- 位置反馈装置(Position Feedback Device):
- 位置反馈装置用于提供舵机当前角度位置的反馈信号,以确保准确的位置控制。
- 常见的位置反馈装置包括旋转电位器、光电编码器等。
- 位置反馈信号可以用于舵机的闭环控制,使其能够实现更高的运动精度和稳定性。
- 外壳(Casing):
- 舵机通常由坚固的外壳包裹,保护内部组件免受外部环境的影响。
- 外壳通常由塑料或金属材料制成,具有一定的防护性能和机械强度。
- 输出轴(Output Shaft):
- 输出轴是舵机的旋转部分,通过电机和减速装置的驱动,实现角度位置的控制。
- 输出轴通常带有一个齿轮或花键,用于连接和传递动力给其他机械装置。
舵机的组成和结构使其能够实现精确的角度控制和运动输出。通过电机的驱动和减速装置的作用,舵机可以提供足够的扭矩和运动精度。控制电路和位置反馈装置确保舵机能够准确地响应控制信号并保持稳定的位置。外壳和输出轴则提供保护和连接功能,使舵机能够适应不同的应用场景。
控制模式
舵机有几种常见的控制模式,下面简要讲解每一种模式的工作原理:
- 扭矩控制模式:
- 在扭矩控制模式下,舵机根据控制信号提供的扭矩输出来控制输出轴的角度位置。
- 控制信号通常是一个脉冲宽度调制(PWM)信号,脉冲宽度代表所需的扭矩大小。
- 舵机的控制电路根据控制信号的脉冲宽度来调节电机的电流,以提供相应的扭矩输出。
- 这种模式适用于需要根据负载要求提供不同扭矩的应用,如机器人臂的扭矩控制。
- 位置控制模式:
- 在位置控制模式下,舵机根据控制信号提供的角度位置要求来控制输出轴的旋转角度。
- 控制信号通常是一个脉冲宽度调制(PWM)信号,脉冲宽度代表期望的角度位置。
- 舵机的控制电路根据控制信号的脉冲宽度与位置反馈信号进行比较,调节电机的转动以达到指定角度位置。
- 这种模式适用于需要控制舵机精确旋转到特定角度位置的应用,如航模中的方向舵控制。
- 速度控制模式:
- 在速度控制模式下,舵机根据控制信号提供的速度要求来控制输出轴的旋转速度。
- 控制信号通常是一个脉冲宽度调制(PWM)信号,脉冲宽度代表期望的旋转速度。
- 舵机的控制电路根据控制信号的脉冲宽度和位置反馈信号来调节电机的转速,以达到指定的旋转速度。
- 这种模式适用于需要控制舵机以特定速度旋转的应用,如机械臂的关节控制。
舵机的控制可以通过调整控制信号的脉冲宽度来实现。通常,脉冲宽度的范围为 1ms 到 2ms,其中 1.5ms 表示中立位置。增加脉冲宽度会使舵机旋转到一个方向,减小脉冲宽度会使舵机旋转到另一个方向。通过改变脉冲宽度的值,可以控制舵机的位置、速度或扭矩。
需要注意的是,不同品牌和型号的舵机可能会有不同的工作模式和控制方式。在使用舵机之前,应仔细阅读舵机的技术规格和说明书,以确保正确的操作和控制。以上只是针对航模中最常见的舵机进行说明,比如在机器人关节使用的舵机一般就是总线舵机,这种舵机通过总线数字信号进行控制。
主要参数
舵机的主要参数包括以下几个方面:
- 扭矩(Torque):扭矩是舵机能够提供的力矩大小,通常以重量 × 力臂的积(如 kg·cm 或 oz·in)表示。较高的扭矩意味着舵机具有更大的输出力量,可以应对更大的负载或提供更强的控制力。1kg·cm 表示力臂为 1cm 时可以转动 1kg 重的物体。
- 速度(Speed):速度是舵机旋转的速度,通常以单位时间内转动的角度(如度/秒)表示。较高的速度意味着舵机可以更快地响应控制信号和实现旋转运动。
- 分辨率(Resolution):分辨率指的是舵机能够分辨的最小角度单位。它决定了舵机的精度和控制的精确度。较高的分辨率表示舵机能够实现更精细的角度控制。
- 工作电压(Operating Voltage):工作电压是舵机正常工作的电源电压范围。舵机通常支持一定范围的电压,超出范围可能会导致性能下降或损坏。
- 工作温度(Operating Temperature):工作温度是舵机正常工作的温度范围。舵机通常具有一定的工作温度范围,超出范围可能会影响其性能和寿命。
- 重量(Weight):重量是舵机本身的重量。较轻的舵机可以减轻整个系统的负载,适用于对重量要求较高的应用。
- 尺寸(Dimensions):尺寸指的是舵机的物理尺寸,包括长度、宽度和高度。尺寸信息对于安装和布局设计非常重要,以确保舵机适合应用环境。
- 接口类型(Interface Type):接口类型是舵机与其他设备连接的方式。常见的接口类型包括 PWM 接口、Serial 接口(如 UART 或 I2C)、Analog 接口等。正确选择与控制系统兼容的接口类型是确保舵机正常工作的关键。
这些参数可以帮助用户选择适合特定应用的舵机,并了解其性能和限制。在选择舵机时,需要根据实际需求和应用场景综合考虑这些参数,并参考舵机的技术规格和制造商提供的说明。
舵机虽然看似简单,但是与其它产品一样,真正做好并不容易,高端产品也是贵的离谱。在航模圈,有一些知名品牌和代表型号,供参考:
航模舵机有许多品牌和型号可供选择,以下列出一些知名的航模舵机品牌和代表型号:
- Futaba:
- S3003 Standard Servo
- S3004 Standard Servo
- S3150 Digital Servo
- S9650 Mini Digital Servo
- Hitec:
- HS-55 Feather Servo
- HS-65HB Karbonite Gear Servo
- HS-81 Standard Servo
- HS-7955TG High Torque Digital Servo
- Savox:
- SC-0251MG High Torque Digital Servo
- SC-1258TG Coreless Digital Servo
- SH-1250MG Super Speed Digital Servo
- SB-2274SG Monster Torque Brushless Servo
- Spektrum:
- A3030 Sub-Micro Digital Aircraft Servo
- A5060 Mini Metal Gear Aircraft Servo
- A6180 Digital High Torque Aircraft Servo
- A6270 Ultra Torque High Speed Metal HV Aircraft Servo
- TowerPro:
- MG90S Metal Gear Micro Servo
- SG90 Plastic Gear Micro Servo
- MG996R Metal Gear Digital Servo
- MG958 Digital Metal Gear Servo
这些品牌和型号仅作为参考,市场上还有许多其他品牌和型号的航模舵机可供选择。在选择舵机时,建议根据自己的需求和预算,并结合舵机的性能指标和用户评价,选择适合的品牌和型号。此外,还应确保所选舵机与遥控器和接收器兼容,并满足飞行器的要求。
-
舵机技术新纪元:解锁DIY项目的无限可能2024-10-30 1133
-
2.4g芯片开发的玩具遥控飞机解决方案2023-08-03 3806
-
舵机是用来干什么的 舵机的组成及工作原理2023-07-20 25474
-
什么是舵机?2023-06-20 636
-
DIY遥控飞机导航灯2022-11-08 838
-
SG90舵机怎么使用2022-02-18 777
-
最简单DIY基于51单片机、PCA9685、IIC、云台的舵机集群控制程序2021-11-23 1287
-
舵机控制激光头(51单片机)2021-11-22 1205
-
最简单DIY基于51单片机的舵机控制器2021-11-20 1409
-
舵机控制1.12021-11-15 905
-
什么是舵机?其工作原理是什么2021-07-13 1775
-
DIY遥控飞机教程2019-08-14 48489
-
图文结合DIY制作遥控火车2018-01-18 8960
-
遥控模型发送、接受装置原理2013-12-20 2514
全部0条评论

快来发表一下你的评论吧 !
