

在约束条件下优化非线性目标函数的问题
描述
非线性规划是一类在约束条件下优化非线性目标函数的问题。以下是几个常见的非线性规划算法:
1. 罚函数法
罚函数法通过惩罚不满足约束条件的点,将非线性规划问题转化为一个无约束优化问题。具体来说,定义一个罚函数  ,它在可行域内取值为0,否则为一个较大的正数。这样,原问题可以转化为一个带有惩罚项的无约束优化问题,即:
,它在可行域内取值为0,否则为一个较大的正数。这样,原问题可以转化为一个带有惩罚项的无约束优化问题,即:
其中, 是一个较大的正数。
2. 信赖域法
信赖域法通过在每次迭代中构建一个局部模型来近似原始问题,然后在局部模型上进行优化。优化完成后,比较原始问题和局部模型的表现,决定是否接受求解结果或者继续迭代。该方法的核心是信赖域半径的精确定义和控制。
3. 内点法
内点法通过引入一个内点路径,使得每个迭代点都在可行域内。具体来说,引入一个惩罚因子 ,并将目标函数  中的约束条件
中的约束条件  替换为一个惩罚项
替换为一个惩罚项  。这样,原问题可以转化为一个无约束的优化问题:
。这样,原问题可以转化为一个无约束的优化问题:

然后,通过一系列迭代,将 缩小至零,从而逐步逼近原始问题。
以上是几个常见的非线性规划算法示例。除此之外,还有很多其他的算法,例如拟牛顿法、次梯度法、粒子群算法等等。
使用罚函数法求解非线性规划的简单示例
在 MATLAB 中,可以使用 fmincon 函数来求解非线性规划问题,其中包括罚函数法。fmincon 函数的使用方法非常灵活,可以通过修改参数来指定不同的算法、约束条件等。
以下是一个使用罚函数法求解非线性规划的简单示例:
假设有以下优化问题:

满足以下约束条件:
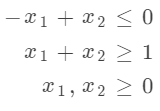
对于罚函数法,我们可以将上面的约束条件转化为惩罚项,即:
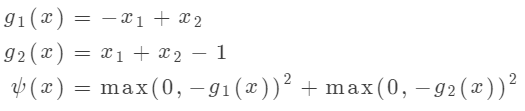
然后将目标函数和罚函数相加,得到无约束优化问题:

其中 是一个较大的正数。
下面是 MATLAB 的代码实现:
% 定义目标函数和约束条件
f = @(x) (x(1)-1)^2 + x(2)^2;
g = @(x) [x(2)-x(1); x(1)+x(2)-1];
% 定义罚函数
rho = 10;
penalty = @(x) max(0,-g(x))^2;
% 定义总目标函数
F = @(x) f(x) + rho * penalty(x);
% 定义初始点和约束条件
x0 = [0; 0];
A = [-1 1; 1 1];
b = [0; 1];
% 调用fmincon函数进行优化
options = optimoptions('fmincon','Display','iter');
[x,fval,eflag,output] = fmincon(F,x0,A,b,[],[],[],[],[],options);
在上面的代码中,首先定义了目标函数 f 和约束条件 g,然后通过罚函数法将其转化为无约束优化问题。最后,调用 fmincon 函数来求解优化问题。
需要注意的是,使用罚函数法求解非线性规划问题时,要根据实际情况选择合适的惩罚系数 。过小的 可能导致解不准确,过大的 可能导致数值不稳定。
审核编辑:汤梓红
-
基本rs触发器的约束条件2023-12-08 7002
-
PanDao:实际约束条件下成像系统的初始结构的生成2025-05-07 849
-
matlab中无约束非线性规划函数\fminunc函数使用方法2012-02-20 10852
-
如何求解约束条件下的线性超定方程组的最优解2012-12-11 12485
-
非线性大工业过程稳态模型的强一致性分析2009-03-02 792
-
一种求解非线性约束优化全局最优的新方法2009-08-11 927
-
基于非线性约束的局部投影降噪2009-11-24 586
-
在低频条件下也能稳定工作的函数发生器2010-05-14 1449
-
带约束条件的函数化简2010-09-19 10811
-
一种多约束条件下路径规划算法研究2012-06-07 1133
-
PCB设计-设置布线约束条件2021-04-13 2598
-
基于无约束优化的无参数填充函数算法2021-06-16 928
-
开关电源线性化条件研究2022-03-30 3276
-
两种SR锁存器的约束条件2024-07-23 3128
-
浅谈多目标优化约束条件下充电设施有序充电控制策略2025-01-07 1376
全部0条评论

快来发表一下你的评论吧 !
