

基于单光子雪崩二极管阵列的成像技术研究进展
模拟技术
描述
单光子雪崩二极管以其极高的光子灵敏度以及超快的响应时间在各领域被广泛应用。随着半导体技术的发展,集成多个像素以及时间测量电路的单光子雪崩二极管阵列逐渐普及。成像是一种以光子作为媒介获取目标物体信息的手段,基于单光子雪崩二极管的成像系统可以利用更丰富的光子计数以及光子时间信息实现极端环境下的目标探测。单光子雪崩二极管阵列具备并行采集光子信息的能力,进一步提高了光子信息的探测效率,能够替代传统单光子成像中单点探测器加扫描结构的探测体系,推动生物显微成像、散射成像以及非视域成像等技术的进步。
据麦姆斯咨询报道,近期,北京航空航天大学的科研团队在《光子学报》期刊上发表了以“基于单光子雪崩二极管阵列的成像技术研究进展(特邀)”为主题的文章。该文章第一作者和通讯作者为孙鸣捷教授,主要从事研究方向为先进成像技术的研究工作。
本文梳理了单光子雪崩二极管阵列的发展历程以及技术趋势,按照是否需要光子时间信息分类介绍了单光子雪崩二极管阵列在成像方面的典型应用,结合应用分析了单光子雪崩二极管阵列相比于其他探测器的优势,对单光子雪崩二极管阵列的应用前景进行了展望。
SPAD阵列的发展历程与技术趋势
SPAD阵列的发展历程可大致总结为由单个雪崩光电二极管,到具备一定功能的像素,再到集成度较高的像素阵列。SPAD在探测到单个光子后,其自发性的雪崩过程需要被及时终止以避免持续高电流对器件的损坏,随后SPAD上的反向偏压会逐渐回升并使SPAD再次回到待命状态。上述淬火与充能过程的持续时间即为SPAD的死时间(Dead Time),这期间SPAD无法探测光子。结合淬火电路的SPAD即可构成最简单的SPAD像素,此类像素的输出仅为与光子入射所对应的一系列电脉冲,更复杂的SPAD像素还可能具备光子计数功能或时间相关光子探测功能。目前,单个SPAD像素的光子探测概率(PDP)可达70%。
光子时间测量电路也是SPAD像素中的重要组成部分,决定了SPAD的光子时间探测性能。值得一提的是,即使不借助时间测量电路,一些工作在光子计数模式下的高速SPAD也能够以μs级别的精度区分微弱光强的变化,但无法精确测量光子飞行时间。应用在SPAD像素中的精确光子时间测量方案主要包括时间相关光子计数(TCSPC)技术以及时间门控(TG)技术。TCSPC能够以ps级别的精度测量光子的到达时间,但需要较复杂的时间数字转换(TDC)电路。具备TCSPC功能的SPAD像素一般只有很低的填充因子(感光区域的面积在整个像素中所占的比例)。时间门控技术利用时间门控电路使得SPAD仅在某个特定的时间窗口内(一般为ns量级)被激活,该时间窗口能够以ps的间隔移动并覆盖整个探测周期。相比于TCSPC技术,时间选通门控方案结构简单,成本更低,非常适用于大像素规模的SPAD阵列。
当像素内的电路被确定之后,可以将多个SPAD像素集成为阵列,以获得并行的光子探测能力。面阵SPAD需要在像素内附加电路来实现光子信息的获取、存储和传输,额外的电路会占据像素内空间从而降低填充因子。较低的填充因子会导致面阵SPAD的光子探测效率(PDE)下降,但面阵SPAD无需扫描即可获得二维图像。SPAD最早主要通过定制工艺进行制造,可以针对性地优化光敏单元结构或掺杂浓度从而改善SPAD的PDP以及噪声表现,但这类SPAD的可扩展性通常较差。2003年,利用标准CMOS工艺制造的8×4像素SPAD阵列被首次报道。尽管基于标准CMOS工艺制造的SPAD在综合性能表现上还不够理想,但标准CMOS工艺可以将光敏单元与附加电路进行大规模集成,使SPAD阵列能够集成更多的像素并有更丰富的光子探测功能。
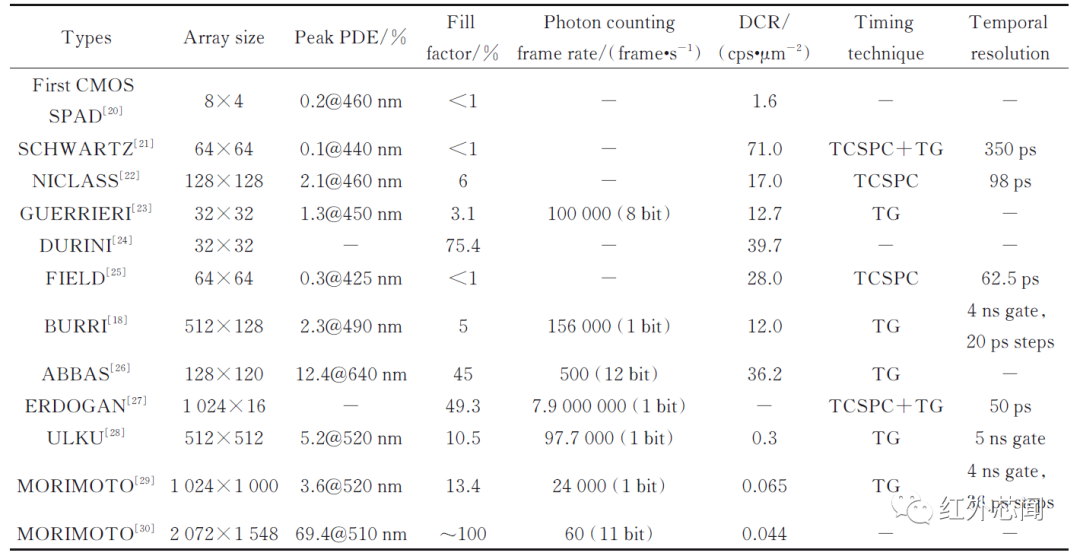
近年来随着工艺的进步以及设计的优化,SPAD阵列的综合性能表现有了显著提升。目前最新的SPAD阵列,PDE最高可达70%,暗计数率(DCR)可降至0.1 cps/μm²以下,同时像素规模可达百万量级。SPAD像素中的附加电路也在不断发展,可以在SPAD阵列上集成更为复杂的电路系统。目前先进的SPAD阵列可同时具备光子计数功能以及光子时间测量功能,潜在的应用场景更加丰富。在大量应用于科学研究的同时,SPAD阵列的产品化进程也在不断推进,半导体厂商索尼已经推出了面向自动驾驶领域的高分辨率、低成本、小体积的商用SPAD阵列。表1中总结了近年来具有代表性的SPAD阵列的主要性能指标。
表1 近年来SPAD阵列的主要性能指标概览
随着SPAD阵列在性能上的不断发展与成熟,在一些应用场景中SPAD阵列已经开始逐渐取代ICCD与条纹相机等昂贵的阵列式单光子探测器,但SPAD阵列在探测效率、暗计数、均匀性以及时间分辨能力等指标上还有进一步优化的空间。SPAD像素的PDP与DCR主要与光敏单元有关,受制造工艺、PN结的结构以及反偏电压等因素的影响。提升PDP的主要思路是提高光生载流子引发雪崩的概率,具体途径为提升耗尽层中电场的强度。高场强要求较高的反偏电压以及比较薄的耗尽层,但高电压会带来高功耗,且较薄的耗尽层会导致光敏区域变小,影响整体的探测效率。另外基于标准CMOS工艺的SPAD会有相对较多的晶格缺陷,从而导致光生载流子被束缚,无法引发雪崩。暗计数的主要来源是SPAD耗尽层内由于热效应或隧道效应而产生的自由载流子,影响暗计数的主要因素包括PN结中晶格的缺陷、杂质以及掺杂浓度等。
使用标准CMOS工艺制造的SPAD阵列,其缺陷以及杂质含量相对较多,比定制工艺SPAD会有更高的暗计数。优化SPAD暗计数的方法包括优化PN结的结构,添加吸附杂质的工艺步骤以提高PN结质量等,另外降低反向偏压与光敏区面积都有利于抑制暗计数,但这也会导致PDE的下降。针对光敏单元中各项性能参数之间的相互制约,可以使用更先进的复合工艺开发性能均衡的SPAD光敏单元,例如BCD工艺。SPAD的死时间以及时间测量精度主要取决于像素中的附加电路。通过对淬火电路的优化可以将SPAD的死时间降低至ns以下且不引入额外的噪声,还可以通过淬火电路控制反偏电压以降低功耗或补偿SPAD阵列中各像素的不均匀性。SPAD像素中的TDC决定了光子时间测量能力,但高性能的TDC一般都有更高的功耗和更大的电路面积。考虑到弱光环境下SPAD阵列中单个像素的光子探测率比较低,因此可以在多个SPAD像素间共享TDC,可以在保证性能的同时显著降低电路面积与功耗。高性能的附加电路能够显著优化SPAD阵列的探测频率以及时间分辨率,但往往这类电路会有更复杂的结构和更多的晶体管,对光敏区域的面积会有一定的限制。
由以上分析可知,在SPAD阵列的设计与制造过程中,尤其是对于大规模的SPAD阵列,性能、体积、功耗以及成本等因素会相互制约。设计者可以针对应用场景对SPAD阵列的各项性能指标进行适当权衡,例如一种为时间相关单光子成像而设计的SPAD阵列重点优化了PDE以及时间分辨能力。该SPAD阵列的峰值PDE达到70%,同时集成了时间分辨率为6 ps的TDC,使得该阵列在弱光环境下也能够采集到精确的时间相关光子数据。但该阵列的噪声表现相对较差,暗计数达到1 kcps。另外,微透镜技术以及3D电路堆叠技术可以有效解决SPAD阵列中填充因子与附加电路之间的矛盾。安装在SPAD像素上的微透镜能够将入射光子聚焦至像素内的光敏区域,在不影响像素结构的情况下可以使等效填充因子得到成倍提升。
3D电路堆叠技术可以将SPAD光敏单元与附加电路在两块基板上分别制造并将二者集成,从而克服填充因子与附加电路之间的矛盾。3D电路堆叠技术还能够将基于定制工艺的高性能SPAD与易集成的CMOS附加电路相结合,若能解决3D电路堆叠技术的成本以及设计复杂度等问题,该技术将会是未来高性能SPAD阵列的有效解决方案。在电路设计层面,数值仿真手段的进步也使人们可以在SPAD设计阶段通过仿真的方法预测并优化PDP等性能参数,在具备较高可靠性的同时还降低了设计阶段的成本。随着SPAD像素规模的不断增大,大量光子数据的存储、处理与传输也将会是一个难题,利用高性能FPGA进行光子数据的本地预处理可以有效降低数据存储量,减轻后续与计算机之间的数据传输压力。
随着工艺、材料以及电路设计的进步,未来性能均衡、成本低廉的SPAD阵列将有望得到普及。目前基于CMOS的SPAD像素在性能接近或超越定制工艺SPAD的同时还具备大规模集成的潜力。2022年报道了一种基于标准180 nm工艺的SPAD像素,峰值PDP达到55%,时间抖动最低为12.1 ps,死时间低至3 ns且最低暗计数为0.06 cps/μm²。目前该SPAD像素还并未形成足够规模的SPAD阵列,如何在性能不退化的前提下将这类高性能SPAD像素进行集成是未来仍需要解决的问题。
基于SPAD阵列高速单光子探测能力的成像技术
在一些不需要精确光子时间信息的成像应用中,SPAD阵列能够以光子计数模式工作并以极高的帧率获取二维单光子图像,这使得SPAD阵列在弱光环境下的成像性能非常出色。在一些典型的弱光成像应用中,例如生物医学显微成像,SPAD阵列得到了广泛应用并在成像速度、图像信噪比等方面取得了新的突破。
超分辨生物显微成像
传统生物显微成像的分辨率一般被限制在衍射极限内,如何突破衍射极限获取高分辨图像一直是研究人员关注的热点。实现超分辨显微成像的一种方法是通过对生物组织中单个荧光分子进行精准的定位,即单分子定位超分辨显微成像技术(SMLM)。SPAD阵列能够以极高的帧率探测单个光子,且不受读出噪声的影响,为实现更高速、更高精度的SMLM提供了可能。
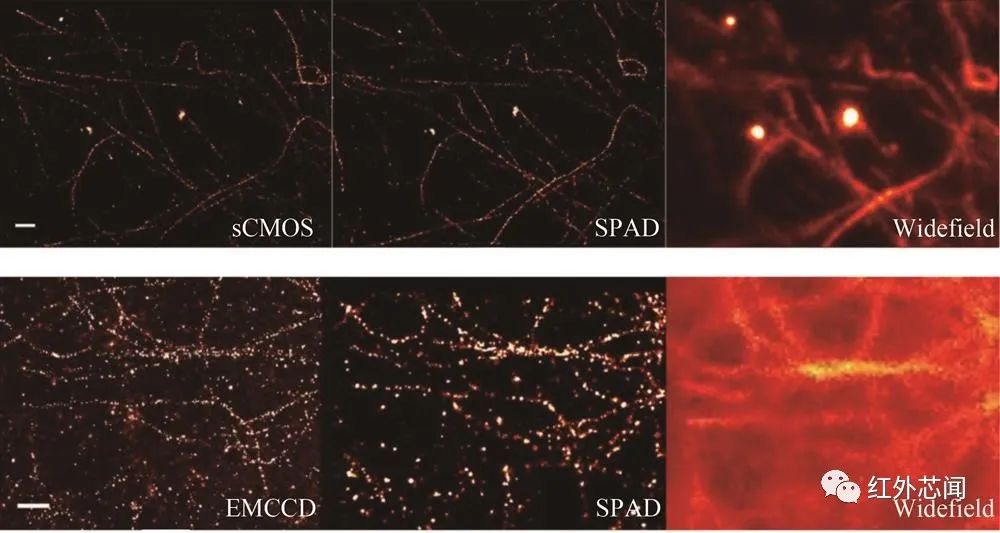
图1 sCMOS、SPAD阵列、EMCCD的超分辨成像结果与衍射受限成像结果的对比
与EMCCD以及sCMOS等探测器相比,目前SPAD阵列在像素规模、像素填充因子以及探测效率等方面还有待提高。随着微透镜技术的普及与先进制程CMOS工艺的应用,SPAD阵列的空间分辨率及光子探测效率将不断提升。未来SPAD阵列有望替代现有的EMCCD与sCMOS,为揭示纳米尺度下细胞的精细结构提供有力的工具。
散射关联成像
无损地监控生物组织深层结构的动态变化是一项非常有挑战性的任务,同时在很多应用场景中具有实际意义,例如在临床医学中实时监测大脑的血流量。散射关联频谱成像技术(DCS)是一种很有潜力的无损光学监测技术。DCS将相干光耦合至目标物体中,通过测量出射散斑的时间相关性来监测深层组织的动态变化情况。SPAD阵列的高灵敏度和高帧率能够有效地探测来自深层组织的散射光子,同时能够以较高的时间分辨率监测散斑的动态变化情况。另外SPAD阵列的多个像素能够并行地测量多个散斑,进一步提升信噪比。
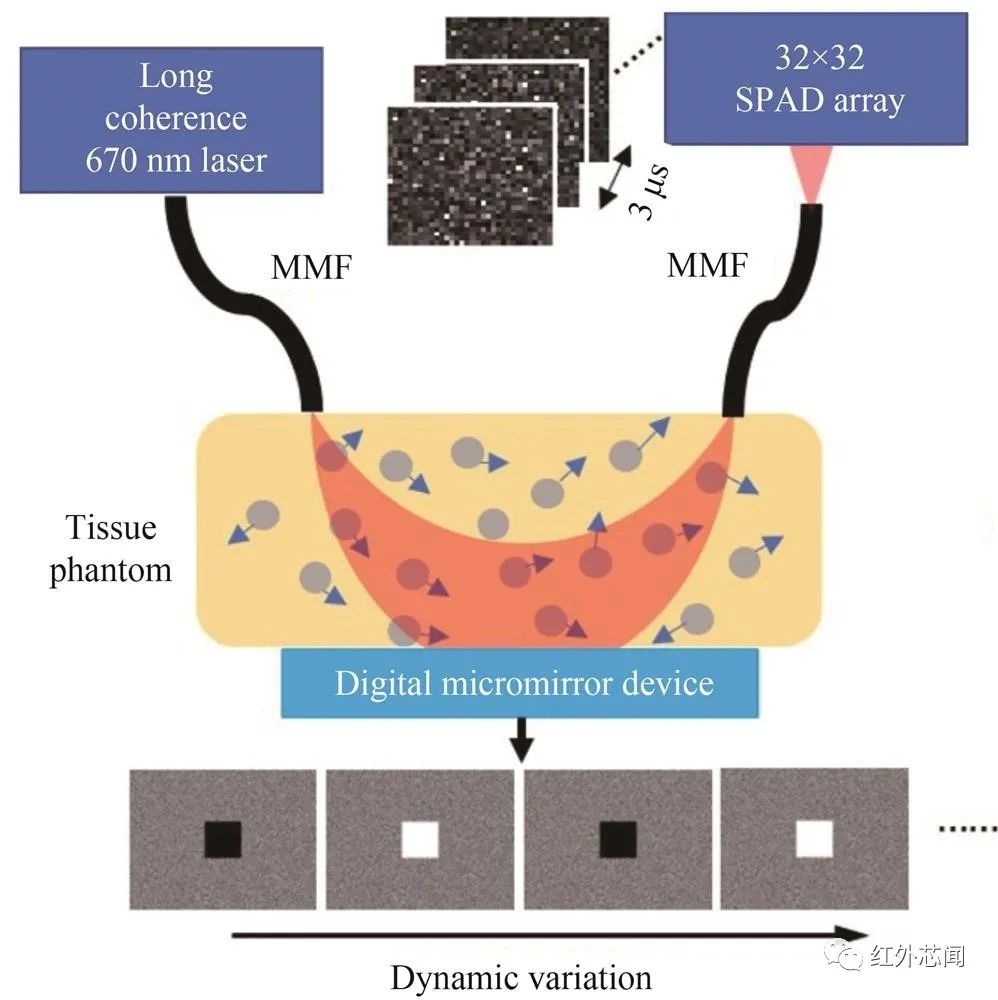
图2 基于SPAD阵列的DCS系统示意图
随着SPAD阵列集成技术的进一步发展,超大像素规模的SPAD阵列也已经出现,这些新的设备在DCS中的应用将会进一步提高信噪比与成像速度。另外,近红外生理窗口(650~950 nm)波段的光在生物组织中的穿透性较强,通过针对性的设计或基底材料的优化可以提高SPAD在该波段的光子探测概率,进而有效提升DCS的探测深度。SPAD阵列还可能结合FPGA直接进行快速的散斑自相关运算,可以显著地提升系统集成度与成像速度,将有望实现DCS无损探测设备的产品化和小型化,推动DCS技术在实际临床诊断中的普及。
高动态范围成像
传统的图像传感器例如电荷耦合器件(CCD)或CMOS等基本都是线性响应的,即光电荷数量与入射光强成正比。线性响应传感器在强光下很容易达到饱和,当单帧图像曝光时间内的累积的光电荷达到饱和时,后续所有入射的光子都将被忽略。SPAD阵列工作在盖革模式下,在单个光子探测事件之后需要一定的时间(死时间)才能重新回到光子探测状态。SPAD在整个曝光过程中都能探测光子,但最高光子计数频率与死时间相关。
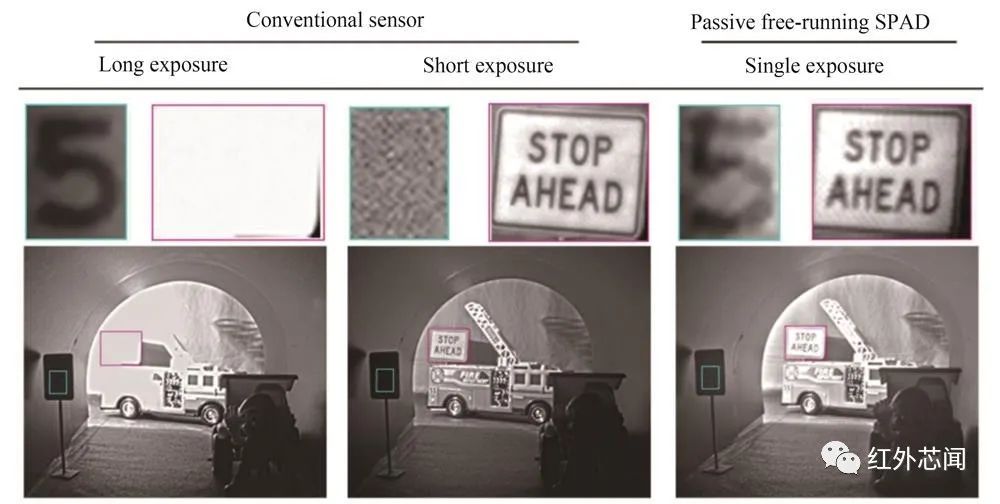
图3 传统相机与SPAD阵列在高动态范围场景下的成像结果
虽然目前SPAD阵列的空间分辨率较低,需要结合扫描装置或额外的图像信息才能获得高质量的高动态范围图像,但目前传统成像设备的性能还难以满足自动驾驶、目标识别等领域中对高动态范围场景成像的需求,未来随着高分辨率SPAD阵列成本的不断降低,SPAD阵列有望推动高动态范围成像在各领域中的普及。由于高动态范围成像主要对SPAD的光子计数频率有比较高的要求,因此可以对SPAD像素中的淬火电路以及后续信号读出电路进行针对性的优化,提高SPAD阵列的最高光子计数频率,同时可以舍弃TDC等时间测量电路以提高填充因子并降低大规模制造的成本。SPAD阵列一般常用于弱光场景中,基于SPAD阵列的高动态范围成像研究为SPAD阵列开辟了一个全新的应用领域,具有重要的研究价值和广阔的发展前景。
基于光子飞行时间的成像技术
SPAD阵列与时间测量电路的集成,例如TDC与时间门控电路,使得SPAD阵列在具备单光子探测能力的同时还能够精确测量光子的飞行时间(ToF),从而实现对高速物体的追踪或者是拓展成像的维度。在这类需要测量光子飞行时间的应用中,一般需要在SPAD阵列和高重频脉冲光源之间建立时序同步以确定光子飞行时间的计时基准。
荧光寿命显微成像
荧光显微成像被广泛应用于生物医学领域,荧光光强、偏振度以及荧光寿命等参数都可以用于图像的生成。荧光寿命不容易受到光漂白、激发光强以及荧光分子浓度等因素的影响,因此荧光寿命显微成像(FLIM)可以比较精确地区分不同来源的荧光信号。荧光寿命对外界环境变化以及分子间相互作用比较敏感,经常被用于对生物大分子结构、动力学信息和细胞微环境等进行精确测量与定量分析。带有时间选通门控电路或TCSPC的SPAD可实现对荧光寿命的高精度测量,然而基于单点SPAD的FLIM成像需要对视场进行扫描,成像速度有限。宽视场FLIM则是直接使用阵列式探测器采集视场中的荧光信息,成像速度得到显著提升。近年来具备时间测量能力的SPAD阵列促进了宽视场FLIM的迅速发展与应用。
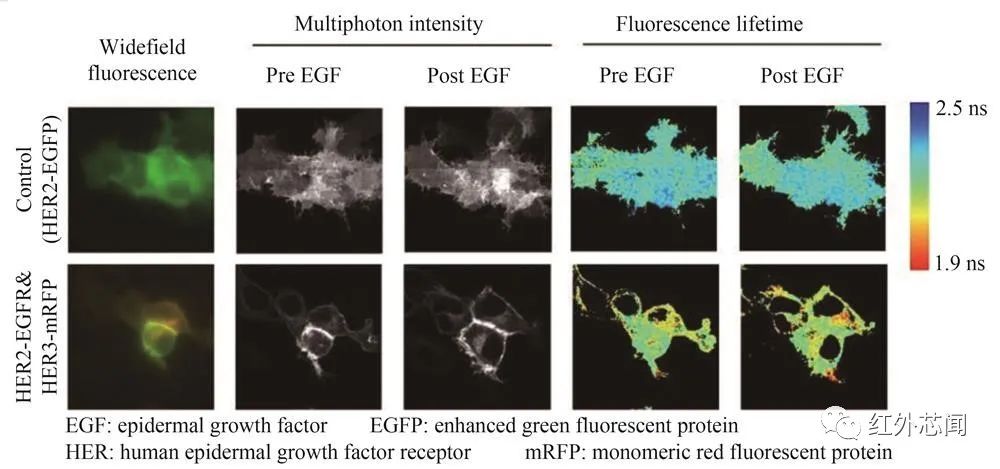
图4 基于SPAD阵列的宽视场荧光寿命成像与荧光强度成像的对比
虽然大部分基于SPAD阵列的宽视场FLIM成像在空间分辨率、信噪比等方面还无法超越单点扫描FLIM成像,但宽视场FLIM具有很高的成像帧率,对生物样本的光损伤也相对较低,能对活细胞或是生物组织进行实时监测,在细胞分子动力学研究中有广阔的应用前景。未来适用于宽视场FLIM成像的SPAD阵列需要在保持较高的成像分辨率与帧率的情况下限制功耗并提升探测效率。理论上在SPAD阵列中的每个像素内都集成TDC能够提供最高的光子时间测量容量,可以改善信噪比与成像帧率,但是这会影响填充因子并导致较高的功耗。使用多像素共享TDC的方案可以缓解性能与功耗之间的相互制约,但是需要根据成像场景的光通量设置合适的共享TDC数量,以保证信噪比和帧率不受影响。另外,高分辨与高帧率的FLIM成像还需要解决大量光子时间信息的传输问题,可以结合高性能FPGA进行荧光寿命的预估计或光子数据的压缩,降低所需的数据传输带宽,进一步推动宽视场高速FLIM技术的实用化。
单光子激光雷达
单光子激光雷达使用激光主动探测目标物体,通过测量返回光子的飞行时间获取深度信息,能够以较高精度重建远距离目标物体的三维形状,被广泛应用于自动驾驶、机器视觉以及遥感测绘等领域。基于阵列式SPAD的单光子激光雷达系统相比于传统的单点扫描方式,在采集速度上有明显的优势,适用于自动驾驶等需要实时三维场景信息的领域。
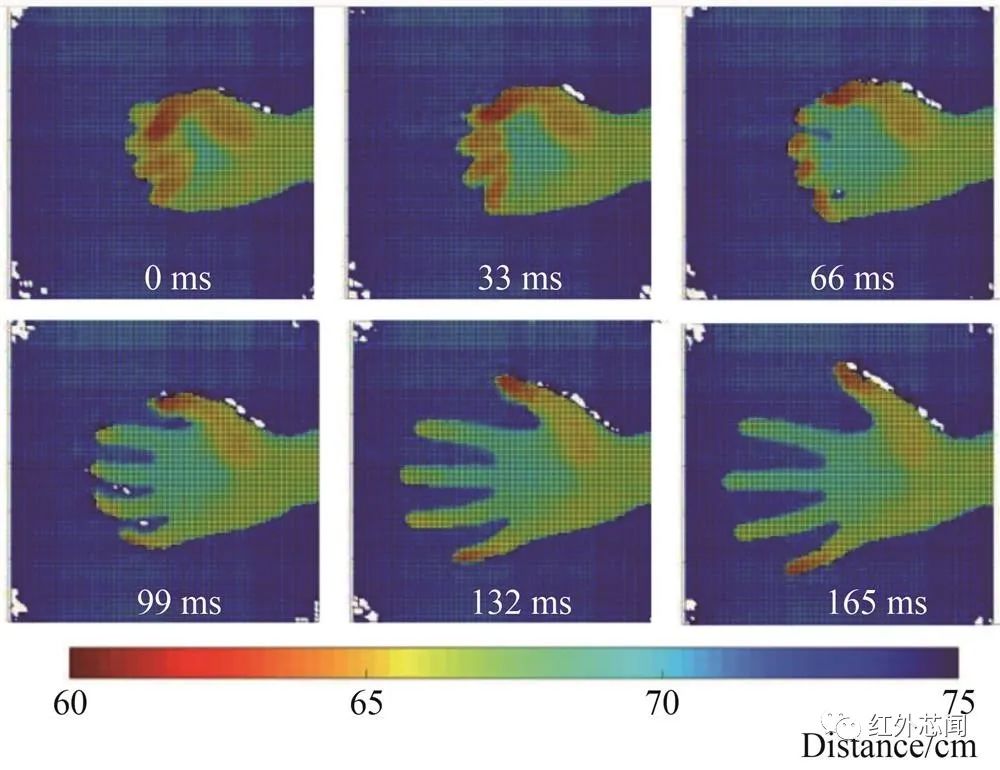
图5 SPAD阵列采集的连续6帧深度图像,速度为30帧/秒,其中一只手正在紧握和松开
在硬件方面,SPAD阵列的时间分辨能力是激光雷达应用所需要的关键指标。可以对SPAD阵列中光敏区域的厚度以及淬火电路进行优化,降低探测器的时间抖动,同时应该根据应用场景确定合适的时间分辨率与量程并搭配相应的TDC电路。微透镜技术以及3D电路堆叠技术可以显著提升SPAD阵列填充因子,从而提升激光雷达系统的探测效率与成像速度。另外相比于单点扫描结构,基于SPAD阵列的激光雷达的光源能量更为分散,因此搭配更高脉冲能量、更高重频的激光器也是提高探测距离与成像速度的关键因素之一。在算法层面,现有的单光子激光雷达往往需要多次探测以准确估计反射光信号的到达时间,首光子成像算法的应用能够有效降低现有单光子激光雷达系统对入射光子数量的要求。
光脉冲飞行成像
SPAD阵列能够在全视场范围内并行采集光子数量以及飞行时间信息,对于在视场内以光速运动的激光脉冲,可以利用SPAD阵列的数据重建激光脉冲的飞行过程,即光脉冲飞行成像(LiF)。相较于基于全息干涉、条纹相机或是光子混合器件(PMD)的LiF成像,基于SPAD阵列的LiF成像系统具有结构简单、成本低与精度高等优点。
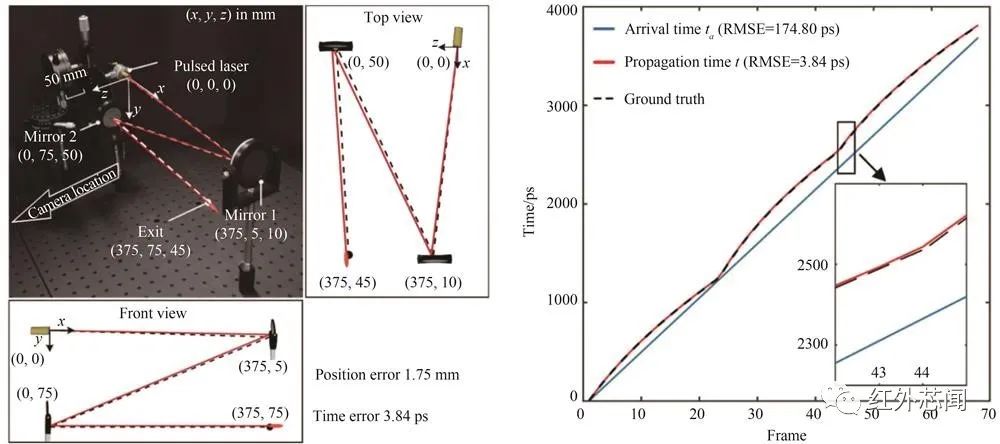
图6 基于SPAD阵列的四维LiF成像结果
在LiF成像中,各像素采集的光子信息并不是相互独立的,可以通过关联多个像素的相对位置以及飞行时间等信息拓展LiF成像的维度。适用于LiF成像的SPAD阵列应当具有较高的时间分辨能力与填充因子。较高的填充因子可以降低SPAD视场中的盲区,使得激光脉冲在飞行过程中的强度与形状被完整地记录,而SPAD阵列的时间分辨能力可以使人们精确地记录并分析激光脉冲随时间的变化情况。未来随着SPAD阵列的进一步发展,可以利用SPAD阵列对一些更复杂的超快过程进行成像,例如观测超快激光脉冲与物质的相互作用过程。
基于光子飞行时间的非视域成像
传统光学系统往往依赖于光的直线传播原理以及物点与像点之间的一一对应关系,成像的目标仅限于视场之内。然而在自动驾驶、地震救援与军事侦察等领域,仅有视场内目标物体的信息并不能完全满足需求,如何将成像的范围拓展至直接视域外是近年来成像领域的研究热点。基于光子飞行时间的非视域(NLOS)成像因其测量范围大、重建精度高等优点成为了NLOS成像的一种主要实现方案。在基于光子飞行时间的NLOS成像中,脉冲光于中继面上散射后与直接视域之外的目标物体发生二次散射,最终携带物体信息的部分光子再回到中继面上并被探测器所接收。
条纹相机、ICCD以及PMD等设备最先被应用于NLOS成像中,随后单点SPAD加扫描振镜的结构因其高精度、低成本与灵活性高等特点被广泛应用于NLOS成像中。然而基于单点扫描的NLOS成像系统始终难以突破成像速度的瓶颈,因此人们开始将SPAD阵列用于NLOS成像系统中以提高成像速度。
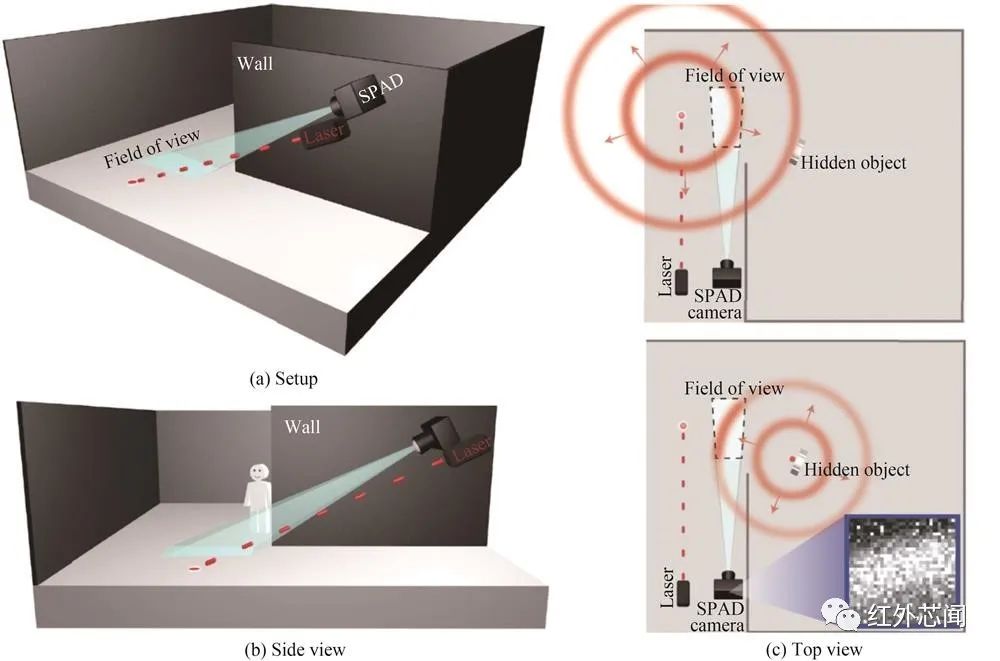
图7 基于SPAD阵列的非视域目标追踪系统
目前SPAD阵列在时间分辨率以及暗计数等性能指标上与单点SPAD还存在一定差距,基于SPAD阵列的NLOS重建算法还不成熟,但SPAD阵列在成像速度以及系统集成程度方面优于单点SPAD加扫描振镜的结构。在一些应用场景中,例如自动驾驶,对NLOS成像系统的实时性与便携性会有非常高的要求。另外,三维NLOS成像的纵向分辨率主要取决于SPAD的时间分辨能力,使用时间分辨能力更强的SPAD阵列可以重建出更丰富的三维物体细节,因此适用于NLOS成像的SPAD阵列在时间分辨率上还需要进一步提升。随着SPAD阵列性能的提高以及非共焦重建算法的优化,未来基于SPAD阵列的NLOS成像系统将有望取代现有的扫描成像构型,进一步推动NLOS成像的普及化与实用化。
时域散射成像
如何对散射介质之后的物体进行成像,一直是光学成像领域中的难题,其中最大的障碍就是携带物体信息的光子在经过散射介质时会发生随机散射而导致信息丢失。在散射介质之后的物体自身发出或反射的光子中,有少部分光子在经过散射介质时未发生散射或散射次数较少,这类光子保持原有传播方向不变且携带目标物体的信息,此类光子被称为弹道光子及蛇形光子。由于被散射的次数较少,弹道光子与蛇形光子总是比多次散射的光子更早到达探测器,因此可以在时域上筛选出这类光子。随着散射介质厚度的增加,这些直接携带物体信息的光子所占的比例会不断降低,增加了探测难度。SPAD阵列能够精确地测量单个光子的到达时间,因此可以使用SPAD阵列探测并筛选出弹道光子以及蛇形光子。
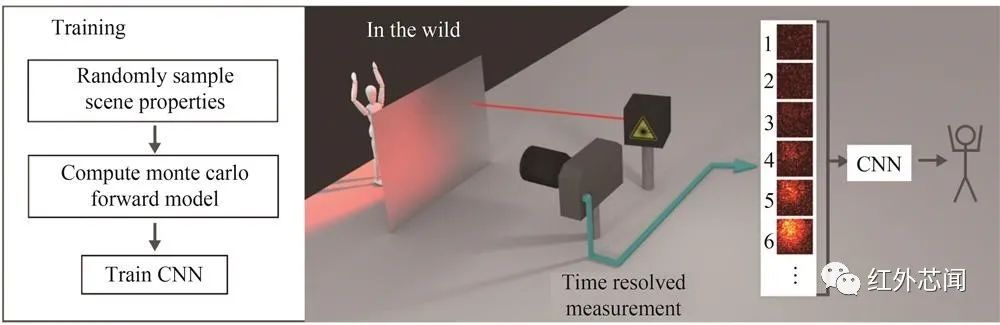
图8 结合SPAD阵列与深度学习实现散射介质后物体的分类
散射成像的难点在于散射介质把原本包含物体信息的光场变得完全混乱,单纯从空域上的光强分布难以辨认物体细节。SPAD阵列能够在空间域以及时间域上提供丰富的光子信息,从建模角度可以结合时域与空域信息建立更完善的散射传播模型,而利用深度学习、神经网络等手段则能够通过额外的时间维度信息更精确地建立目标物体细节与光子数据之间的对应关系,实现更好的成像效果。基于SPAD阵列的时域散射成像将会是解决散射成像问题的有力手段之一。
总结与展望
SPAD的发展与其他光电探测器类似,都经历了由单点探测器到多像素阵列的过程。得益于CMOS技术的应用,SPAD阵列在像素规模以及电路集成度上发展十分迅速,短短十几年间就从几十像素、仅有光子计数功能的简单阵列发展到百万像素且具备时间测量功能的超大规模SPAD阵列。在像素规模逐渐增大的同时,光子探测效率、暗计数、光谱响应范围以及时间分辨率等关键参数也随着相关技术的发展而不断优化。光学成像具有悠久的历史,随着科学的发展与技术的进步,人们的研究兴趣也从传统成像逐渐拓展至极端条件下的成像,例如超分辨成像、极弱光成像以及超视距成像等等。SPAD具备单光子灵敏度和ps级别的时间分辨能力,在极端条件下依然能够获取光子信息。在早期SPAD阵列性能还不够完善时,为了获得二维图像人们往往将单点SPAD探测器与扫描装置结合。随着SPAD阵列的逐渐成熟,在车载激光雷达、生物医学成像等对成像实时性要求较高的应用中,SPAD阵列以其高效的并行单光子探测能力开始逐渐取代单点扫描系统。另外,利用SPAD阵列的高动态范围性能可以便捷地获取高动态范围图像,有潜力解决目标识别以及自动驾驶中成像场景动态范围变化过大的问题。在散射成像以及非视域成像中,SPAD阵列的出现,使得原本被多路径、散射等因素造成的复杂光子传播过程在时域与空域上得以被区分,因此可以结合物理建模或神经网络等方法进一步获取关于视域外或是散射介质之后目标物体的信息,突破了传统成像中“光沿直线传播”的物理限制。利用SPAD阵列的高时间分辨率以及并行采集能力还可以追踪在视场中高速运动的激光脉冲,有助于推进对一些超快光学现象的研究。
近年来SPAD阵列在像素规模、时间分辨能力、暗计数以及探测效率等方面的进步促进了各种成像应用的发展,但随着SPAD阵列像素规模的不断扩大,人们对SPAD阵列的性能要求与有限像素面积、有限功耗之间的矛盾也日益显现。各种成像应用对高性能SPAD阵列的需求促使人们不断突破有限像素面积与功耗造成的瓶颈,例如最新的集成电路工艺可以用于制造性能均衡的SPAD光敏单元,3D电路堆叠技术以及微透镜技术可以在保证附加电路性能的同时提升探测效率,这些技术为未来高性能SPAD阵列的普及提供了可能。另外,在不同的应用场景中可以根据实际需求对SPAD阵列的设计进行优化,舍弃不必要的功能以提升填充因子并降低功耗。在光谱响应方面,目前硅基SPAD阵列的光谱响应峰值主要集中在可见光波段,可以通过结构和工艺优化提高硅基SPAD阵列在近红外波段的光子探测概率,从而利用近红外光较强的穿透能力提升激光雷达与散射成像等技术的探测范围。基于InGaAs或InP等基底材料的SPAD阵列能够响应1 450 nm以上的短波红外光,因此这类SPAD阵列在光纤成像以及量子光学等领域具有很大的应用潜力。SPAD阵列能够高效获取光子时空域信息,如何最大限度地利用这些光子数据也是今后SPAD阵列应用中需要解决的问题。除了建立光子传播的物理模型之外,还可以利用深度学习等数据驱动的智能算法,从更高维度建立光子时空分布信息与目标特征的对应关系,从而深入挖掘SPAD阵列数据中隐含的信息,提高成像的范围、精度以及效率。今后SPAD阵列将会在光学成像中发挥更重要的作用,为人们感知世界、认识世界提供更有力的工具。
审核编辑:刘清
-
雪崩二极管和齐纳二极管的主要区别2024-05-23 3345
-
背照式双雪崩区单光子雪崩二极管(SPAD)介绍2023-11-21 5227
-
InGaAs单光子雪崩焦平面研究进展2023-04-15 3975
-
雪崩光电二极管基础知识点汇总2023-02-06 3171
-
TVS二极管阵列是什么,它的优势有哪些2021-09-20 5558
-
雪崩二极管的噪声是如何产生的?2021-06-18 1348
-
雪崩二极管的作用是什么?2021-03-10 2390
-
雪崩光电二极管的主要特性_雪崩光电二极管的工作原理2019-08-01 14465
-
单光子雪崩二极管猝熄电路的发展2017-01-18 875
-
雪崩渡越时间二极管,雪崩渡越时间二极管是什么意思2010-03-05 2898
-
雪崩二极管,雪崩二极管是什么意思2010-02-27 5679
-
硅雪崩二极管光子辐射特性的实验研究2009-11-11 871
-
雪崩二极管2009-11-07 1036
全部0条评论

快来发表一下你的评论吧 !
