

怎么去设计一种基于AMESim的窨井清挖机械手液压系统呢?
描述
设计了一种窨井清挖机械手液压系统,首先拟定窨井清挖机械手液压系统原理图,该液压系统由定量泵、电磁溢流阀、电磁换向阀、液压锁、双单向节流阀、单向顺序阀、调速阀及液压缸等元件组成,液压系统每个支路独立动作实现机械手的工作循环;然后利用AMESim仿真软件对该液压系统进行仿真,验证了方案的可行性。
引言
随着我国经济的迅猛发展,城市人口日益增多,随之产生的城市垃圾问题也日趋严重,但相对于国外来说,我国的窨井清淤技术还不够完善,城市排水系统中的问题也是复杂多变,比如干燥炎热天气会产生大量的毒气,在阴雨天气又会由于积水无法流通造成城市管道堵塞,从而影响人们的正常生活。
目前,我国在管道清淤方面还处于起步探索阶段,大多数地区仍为人工清淤,主要依靠大铁勺、铁叉、夹具等。工人在井下作业时工作效率低,有些窨井狭窄、危险性大,并且由于常年累积,里面充满有毒气体,易发生危险。相较而言,机械清淤更具优势,但我国的机械清淤仍存在很多问题,比如需要人机配合清淤,采用机械为主、人工为辅的清淤方式,在面对窨井中出现的一些不易清理的杂物或遇到黏稠度较大的淤泥时,还会造成抓斗卡住等一系列存在安全风险的问题[1]。鉴于此,本课题设计了一种用于窨井清挖的机械手液压系统,并利用AMESim仿真软件对该液压系统进行了仿真验证。
1 拟定窨井清挖机械手液压系统原理图
1.1 窨井清挖机械手结构
窨井清挖机械手结构[2]如图1所示。
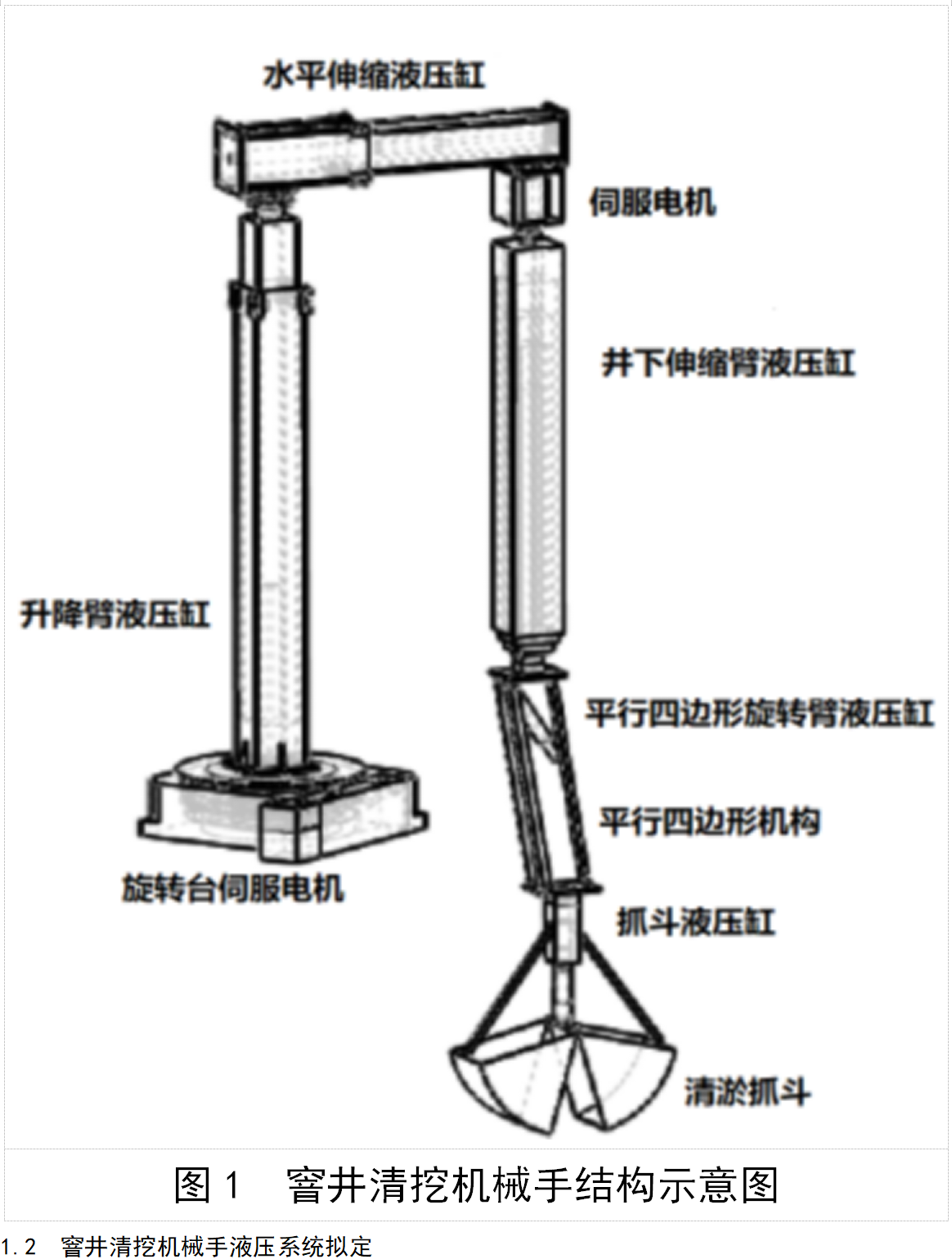
1.2 窨井清挖机械手液压系统拟定
窨井清挖机械手液压系统原理图如图2所示。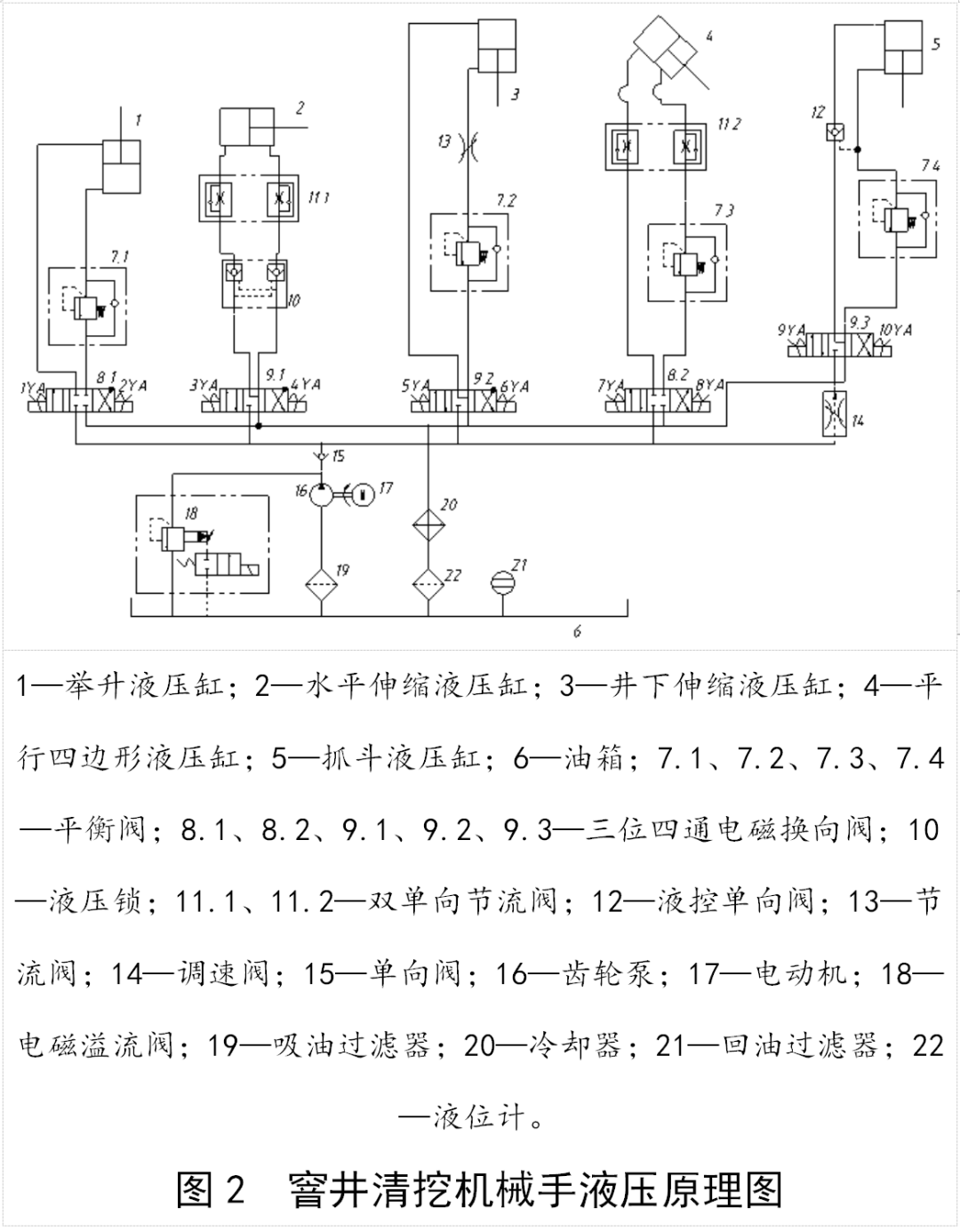
2 窨井清挖机械手液压系统仿真
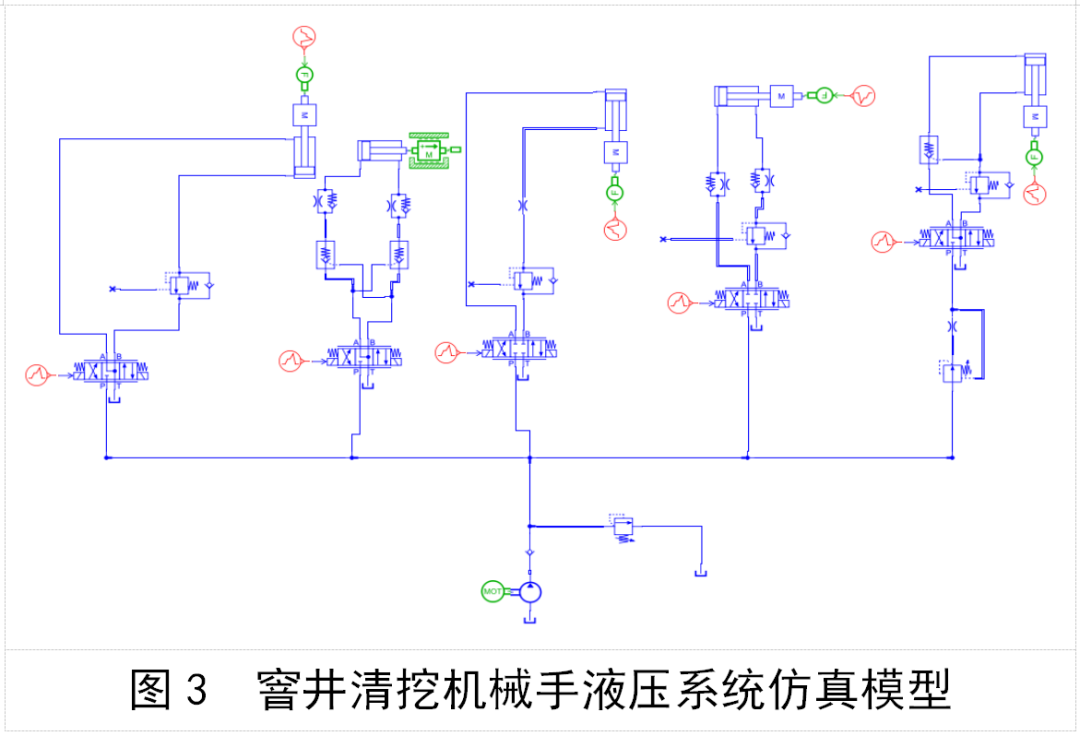
2.1 液压系统建模
在AMESim仿真软件中搭建液压回路如图3所示。
2.2 仿真模型的参数设置
各回路的主要参数如表1所示。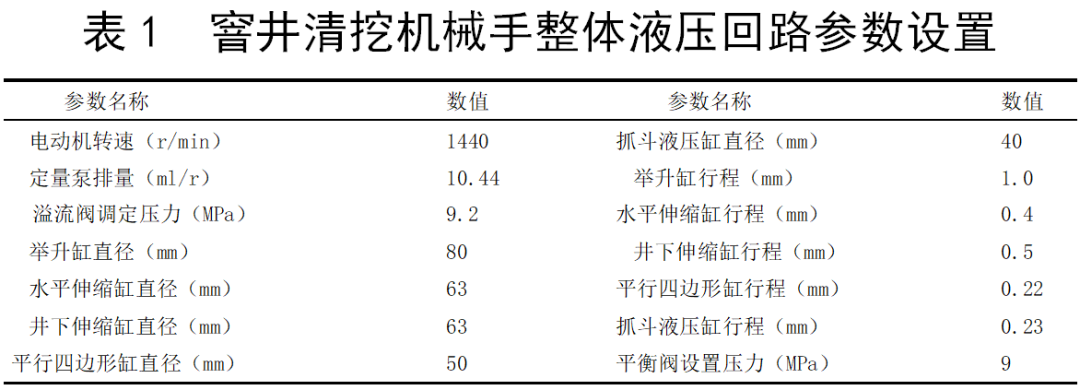
2.3 动态特性仿真分析
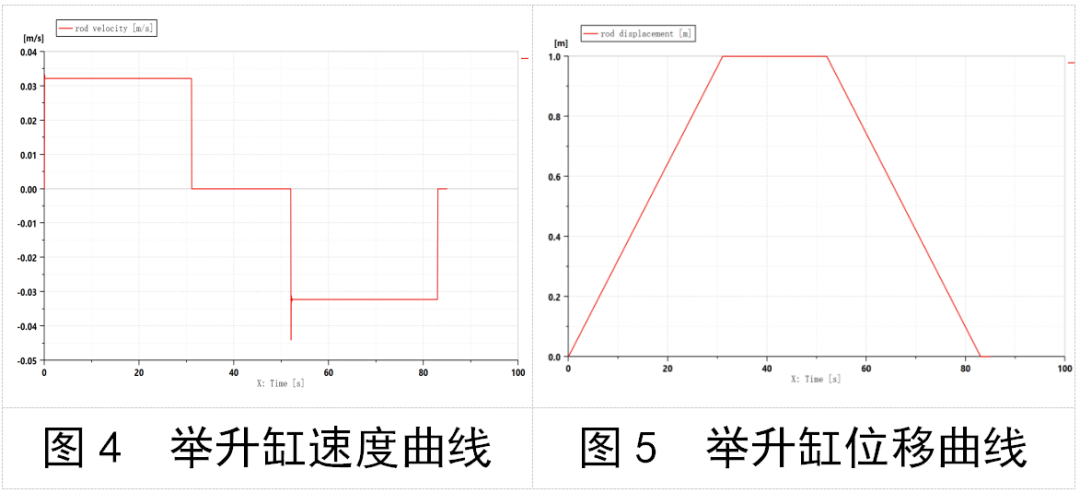
2.3.1 举升缸仿真分析
举升缸的速度和位移曲线如图4和图5所示。
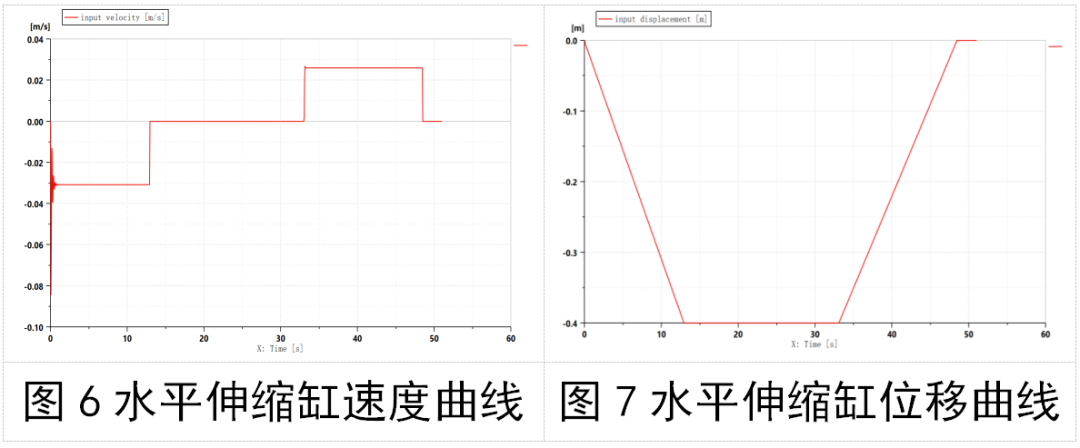
2.3.2 水平伸缩缸仿真分析 水平伸缩缸工进和退回的速度和位移曲线如图6和图7所示。
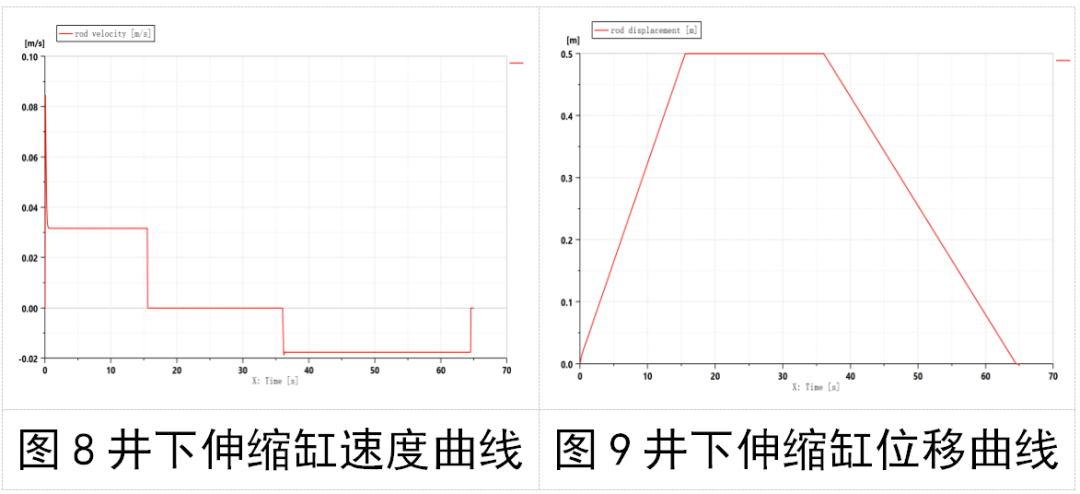
2.3.3 井下伸缩缸仿真分析 井下伸缩缸工进和退回的速度和位移曲线如图8和图9所示。
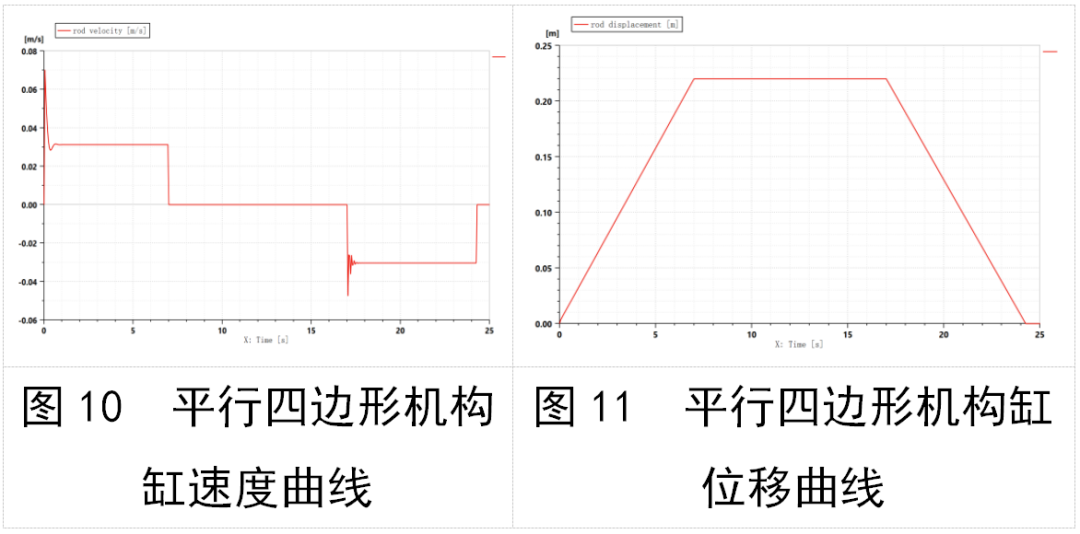
2.3.4 平行四边形机构缸仿真分析 平行四边形机构缸工进和退回的速度和位移曲线如图10和图11所示。
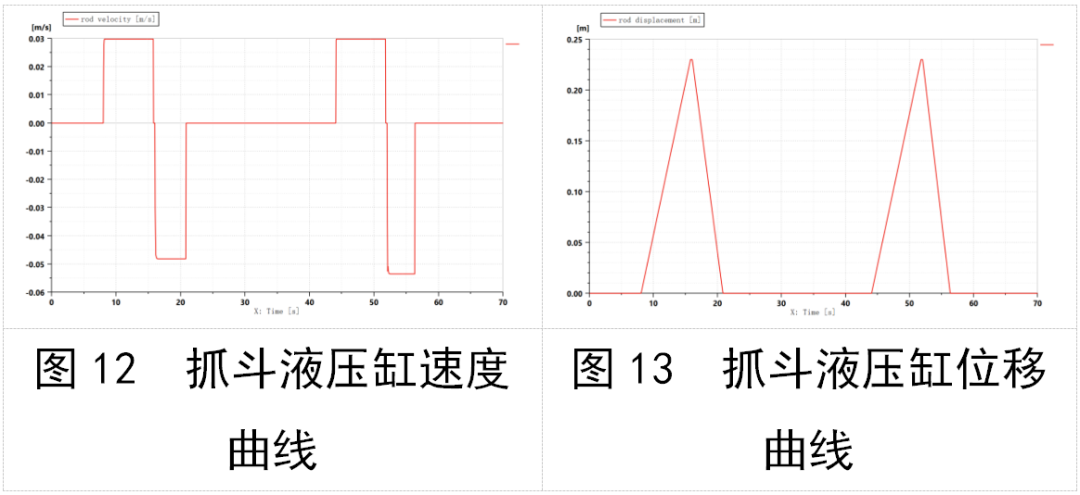
2.3.5 抓斗液压缸仿真分析
抓斗液压缸工进和退回的速度和位移曲线如图12和图13所示。
2.3.6 液压系统整体位移曲线
液压系统执行元件整体位移曲线如图14所示。机械手动作顺序如下:首先举升缸运动,达到指定高度后处于中位保压状态;然后水平缸运动,达到指定位置后处于中位保压状态;接下来井下伸缩缸进入井内,平行四边形机构缸定位,抓斗抓取,井下伸缩缸退回抓斗松开,卸掉垃圾;最后水平缸和举升缸退回完成一次抓取。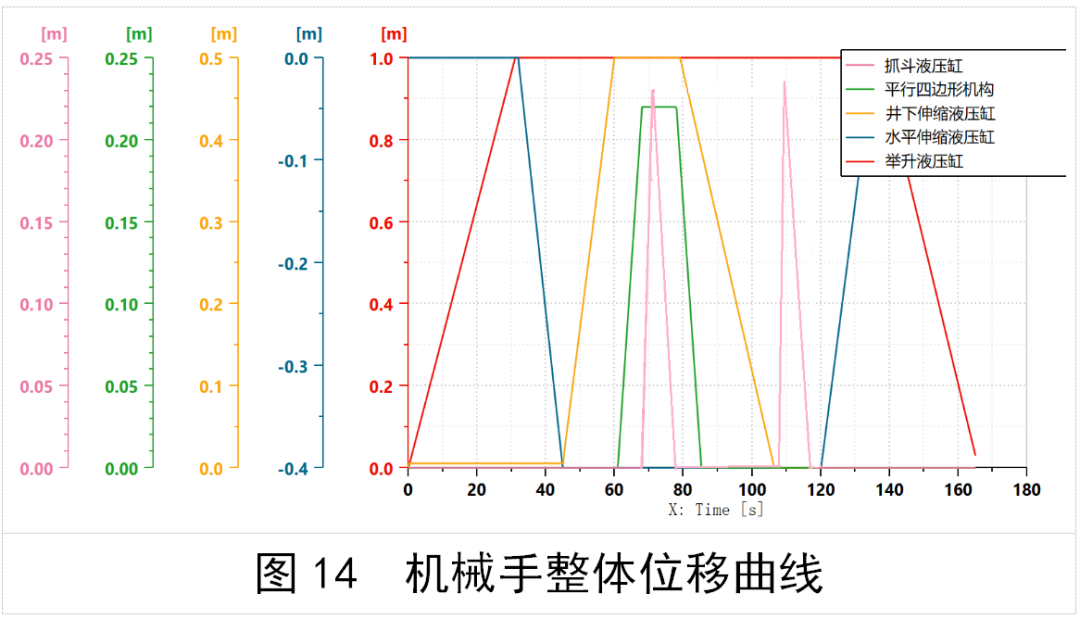
仿真结果表明,该液压系统设计方案可行。
3 结语
本课题提出了窨井清挖机械手液压系统方案,并利用AMESim仿真软件对该液压系统进行了仿真分析,验证了方案的可行性。此窨井清挖机械手极大地降低了工人的劳动强度,提高了清淤效率,不需要工人亲自下井进行清理,能够防范井下可能发生的安全事故,提高工作安全性,在我国城市环保和建设方面都具有重要意义。
审核编辑:刘清
-
机械手驱动系统设计要点2012-09-10 0
-
注塑机机械手控制系统设计要点2012-09-11 0
-
请问用STM32板子怎样去控制一个机械手系统啊?2017-03-09 0
-
使用桁架式机械手有哪些优势?2020-11-25 0
-
与机械手通信,首先暂停机械手,后续继续运行机械手程序后,labview接收不到指令2021-06-21 0
-
请问五轴机械手主臂的负载转矩是如何去计算的?2021-06-28 0
-
气压传动PLC控制机械手臂实验实训台2021-07-01 0
-
请问一下怎样去设计一种剪板机液压系统?2021-07-13 0
-
仿生机械手一般用什么电机?2021-07-13 0
-
湖北视觉分拣机械手系统在手机盖板的应用2021-08-11 0
-
深圳机械手视觉分拣系统有哪些特点及参数?2021-09-22 0
-
深圳上下料机械手系统有哪些特点?2021-09-27 0
-
深圳关节式机械手系统有什么特点?2021-10-21 0
-
如何设计一款基于STM32的仿生机械手2022-01-07 0
-
一种工业机械手的PLC控制2009-09-21 798
全部0条评论

快来发表一下你的评论吧 !
