

使用MPU6050的驱动库来获取姿态数据
MEMS/传感技术
1331人已加入
描述
对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
MPU6050内部自带数字运动处理器(DMP)硬件加速引擎,配合运动驱动库直接输出四元数,进而很方便的计算出欧拉角,大大降低了主控MCU的负担。本篇使用MPU6050的驱动库来获取姿态数据。
1. MPU6050驱动库安装
MPU6050的驱动库有很多,我们可以在IDE中单击「项目」—「加载库」—「管理库」,在搜索栏输入"6050",可以看到不同的驱动库。
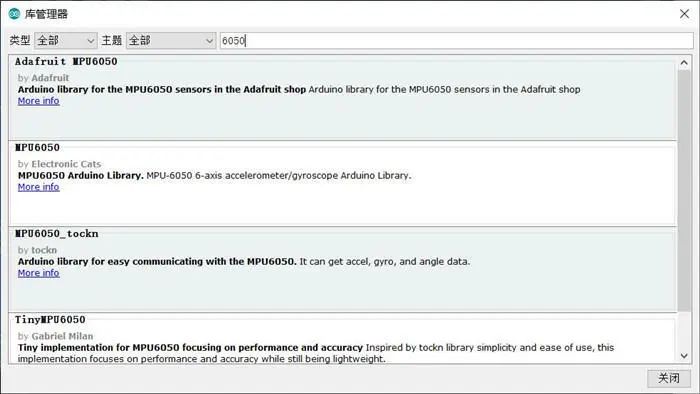
多种驱动库
本篇我们使用的由国外大牛Jeff Rowberg开发的库并没有在列表中,需要下载后导入到Arduino。

下载库文件
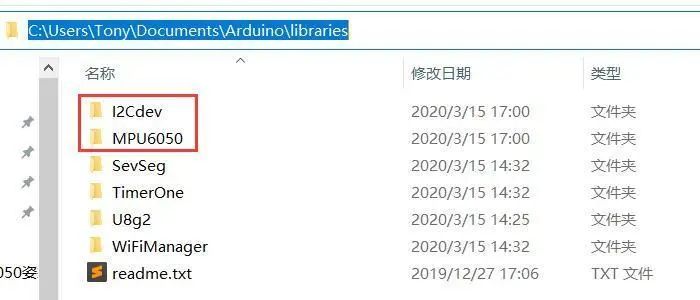
下载到的库文件其实是多种设备的IIC驱动库,我们这里只需要两个文件夹下的文件。解压后,进入"Arduino"文件夹,里面的"I2Cdev"和"MPU6050"就是我们需要的文件。

选择库文件
找到Arduino的libraries文件路径,Windows下路径为"C:\\Users\\Tony\\Documents\\Arduino\\libraries",修改“Tony”为你的电脑用户名。我们拷贝这两个文件夹到该路径下,至此库文件安装完成。
拷贝库文件
2. 实验材料
- Uno R3开发板
- 配套USB数据线
- 面包板及配套连接线
- MPU6050传感器模块
3. 实验步骤
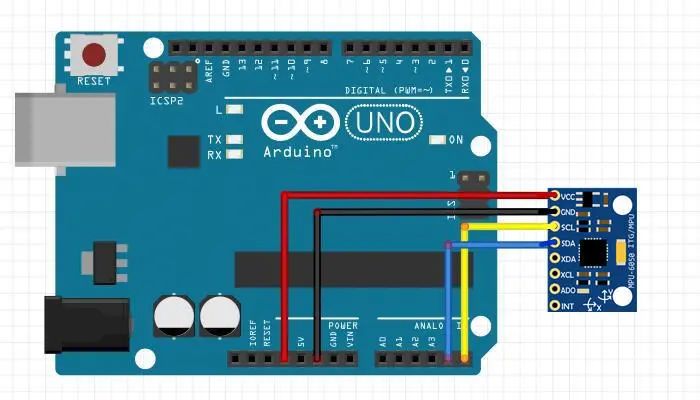
1. 根据原理图搭建电路图。
MPU6050传感器模块的VCC、GND分别连接开发板的3.3V、GND,传感器的SDA、SCL引脚连接开发板A4、A5引脚。
实验原理图如下图所示:
实验原理图
2. 新建sketch,拷贝如下代码替换自动生成的代码并进行保存。
/*
DMP
MPU6050姿态解算
*/
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
MPU6050 mpu;
uint8_t fifoBuffer[64];
Quaternion q;
VectorFloat gravity;
float ypr[3];
void setup()
{
Serial.begin(115200);
mpu.initialize();
mpu.dmpInitialize();
mpu.CalibrateAccel(6);
mpu.CalibrateGyro(6);
mpu.PrintActiveOffsets();
mpu.setDMPEnabled(true);
}
void loop()
{
if (mpu.dmpGetCurrentFIFOPacket(fifoBuffer))
{
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr\\t");
Serial.print(ypr[0] * 180 / M_PI);
Serial.print("\\t");
Serial.print(ypr[1] * 180 / M_PI);
Serial.print("\\t");
Serial.println(ypr[2] * 180 / M_PI);
}
}
3. 连接开发板,设置好对应端口号和开发板类型,进行程序下载。

程序下载
4. 实验现象
打开串口监视器,波特率设置成与程序中相一致的115200。监视器中输出三个欧拉角数据,移动MPU6050,数据发生变化。
实验现象
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CW32L012解算MPU6050姿态数据2026-01-05 2346
-
基于MPU6050与COF屏的航空姿态仪表2022-05-31 3086
-
STM32 MPU6050模块数据获取2022-02-10 1579
-
MPU6050姿态解算的原理是什么2021-12-17 2376
-
MPU6050简介2021-12-06 2727
-
MPU6050模块2021-08-09 3242
-
mpu6050姿态解算原理_mpu6050姿态解算程序2018-03-09 45424
-
mpu6050姿态融合原理及程序代码2017-12-11 75480
-
Arduino与MPU6050的通信2017-11-07 9098
-
mpu6050解算姿态问题2015-05-09 6637
全部0条评论

快来发表一下你的评论吧 !
