

在自动驾驶汽车中实现5G和DSRC V2X
描述
Danish Aziz,Chris Bohm,Fionn Hurley
很显然,车辆通信是实现更高的自动驾驶水平的重要推动因素。但是,长期以来,汽车厂商一直在研究分析所需的无线接入技术应基于蜂窝技术(也称为C-V2X)还是基于直接接入技术(称为DSRC)。在本文中,我们将展示未来的自动驾驶场景需要协调或组合使用这两种技术。先进的多无线标准设备需要集成分别采用不同技术的单个模块。因此,在缺乏无线互联的标准接口的情况下,实现这种协同系统显得非常困难。我们使用最近发布的一款单芯片解决方案来实现双频、双无线标准车载通信系统。利用单芯片,可以在多个频段内同时发送和接收信号。虽然此设备未通过汽车应用认证,但所用的技术可以通过提供产品差异化和增强控制来提升服务质量,为汽车制造商提供支持。
简介
本文将重点介绍车辆通信(V2X)设备的发展情况。将概述V2X应用场景,并介绍可用于执行V2X通信的两种无线接入技术。通过简要介绍V2X,我们将了解由蜂窝网络(也称为蜂窝V2X或C-V2X)控制的V2X通信的无线接入可以在免许可频段和专用频谱范围内为其他无线接入备选技术提供补充,例如专用短距离通信(DSRC)或IEEE 802.11p。为此,需要将用例的要求和利用多接入技术优势的需求结合起来。当涉及到实现多标准V2X设备时,目前可使用多个模块和各自独立的软件/固件。但是,这会限制接入技术的协作/协调功能的潜力。有关这些限制,可参阅“推出适用于未来的V2X系统的单个RF IC (ADRV9026)”一节。 ADRV9026 是ADI RadioVerse®产品组合中的一款射频收发器(TRx),覆盖6 GHz以下的频率范围。这种多通道、多频段收发器技术可实现多频段V2X通信设备。
车对万物(V2X)通信
汽车行业正在快速创新,以便在所有可能的驾驶场景、操作条件和情况下实现全面自动化。事实证明,无线连接不仅是实现全面自动化,也是实现低阶自动化的基础技术之一。特别是,自动驾驶汽车的安全关键应用将非常依赖无线连接。在其他实体共享驾驶空间或交通系统的情况下,以极高(99.999%)可靠性执行安全操作将至关重要。这些实体可能包括其他车辆、人员、道路上的运输系统或交通管理网络。因此,为了与系统中的其他实体进行信息交换、合作和协调,必须为每一辆车配备无线连接功能。
为此,欧洲的管理机构(如ETSI)已经为汽车智能交通系统(ITS)奠定了基础。全世界都开发了类似的系统,包括美国和亚太地区。ITS针对各种应用和用例定义并指定了通信节点、架构、协议和消息。此外,需要新的基础设施以增强免许可频段或专用频段中基于DSRC的应用。随着践行智能高速公路和智慧城市倡议,许多地区都在积极部署相关基础设施。对于C-V2X,可使用现有的蜂窝基础设施。图1显示了ITS车辆与运输系统中的其他车辆或其他实体通信的接口。下面介绍各种接口:
V2V(车对车)通信: 最初它只用于广播消息,但现在车辆也可执行单播或多播消息。这种接口可用于在通信范围内直接从一辆车向另一辆车传递任何信息,例如,在紧急制动时。
V2P(车对人)通信: 使用此接口,车辆和道路使用者可以通过装有V2X应用的智能手机通信。例如,弱势道路使用者可收到警报,提醒有车辆靠近。
V2N/V2I(车对网络或车对基础设施)通信: 此接口可用于传输有助于实现智能交通的任何信息。
适用于V2X的无线接入技术
图2显示了整个ITS的分层架构。顶部应用层包含用例定义,例如紧急制动警告、十字路口避免碰撞和交通信号灯周期1。其他层提供信息和通信支持服务,例如定位/位置信息、提醒消息和通知。最后,通过使用无线技术在空间传送这些协议消息。
美国已建立DSRC支持车辆通信,欧洲则建立了基于IEEE 802.11p的无线接入来实现同样的目的。但是,这些无线技术是基于IEEE 802.11x Wi-Fi标准开发进行专用通信2。因此其范围有限,并且也面临与其他基于Wi-Fi的系统类似的拥堵和服务质量(QoS)问题。此外,还需要投入大量资本来部署路边基础设施,以确保交通管理服务器的覆盖范围。另一方面,通过公共陆地移动无线电(也称为蜂窝通信系统)实现无线接入可以解决覆盖范围和QoS的问题。蜂窝网络已经覆盖了大部分道路,我们还提供由网络控制的计划性接入,通过避免拥堵或掉话来确保服务质量。
第4代长期演进(4G LTE)蜂窝系统标准中已提供V2X服务3。但是,4G LTE的主要目标是基本安全用例。第5代(5G)则针对更多安全关键型和高可靠性用例。蜂窝V2X (C-V2X)是指通过移动网络提供的V2X服务,无论是4G LTE还是5G。车载通信系统的整体情况使得我们不仅能在不同区域,还能够在不同频段内使用多种技术和标准。当我们考虑适用于不同区域和不同标准的不同频段时,整体情况会更为复杂。
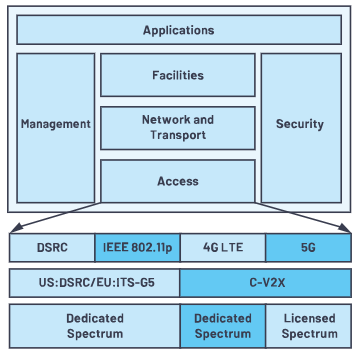
图2. 以通信层形式表示的ITS。
蜂窝V2X (C-V2X)
对移动网络运营商来说,提供100%的蜂窝网络覆盖是一个非常困难的挑战。另一方面,对于互联和自动驾驶车辆来说,无线电覆盖漏洞要比街道上的漏洞更糟糕。因此,C-V2X提供增强特性,使其在没有网络覆盖的情况下也可以正常工作。图3a显示的是车辆在有网络覆盖的情况下进行通信的场景。对于要通信的车辆,可以使用两个选项:
选项1: 使用经典的Uu接口(3GPP为终端用户设备和无线电基站之间的无线电链路定义的名称),两个V2X通信节点之间会用到蜂窝网络。
选项2: 使用名为PC5的新接口,该接口在V2X节点之间提供直接通信。这也称之为侧链(SL)通信。
图3b所示为没有网络覆盖的场景。但是,在使用PC5接口时,V2X节点之间仍可进行通信。在有网络覆盖的场景下,网络可能会使用分配的蜂窝频段。下一节介绍在没有网络覆盖的情况下会使用什么频段。
| V2X 并发频段配置 | 仅适用于5G NR | LTE 4G/5G NR 或 V2X 工作频段 | 接口 |
工作频段 上行链路 (UL) BS 接收 – UE 发送 下行链路 (DL) BS 发送 – UE 接收 |
双工模式 | |
| Flow | Fhigh | |||||
| V2X_34-47 | 34 | Uu | 2010 MHz | 2025 MHz | TDD | |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
| V2X_39-47 | 39 | Uu | 1880 MHz | 1920 MHz | TDD | |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
| V2X_41-47 | 41 | Uu | 2496 MHz | 2690 MHz | TDD | |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
| V2X_38-47 | ✔ | 38 | Uu | 2570 MHz | 2620 MHz | TDD |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
| V2X_48-47 | ✔ | 48 | Uu | 3550 MHz | 3700 MHz | TDD |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
| V2X_79-47 | ✔ | 79 | Uu | 4400 MHz | 5000 MHz | TDD |
| 47 | PC5 | 5855 MHz | 5925 MHz | HD | ||
V2X频谱分配
欧洲已分配一个在5.9 GHz频段内带宽为70 MHz的专用频谱,用于进行车辆通信4。目前正着手在全球范围内分配部署。此外,正在进行协调工作,以便能在此频段内使用ITS-G5和C-V2X。在C-V2X环境下,该服务可能已经通过组合使用PC5和Uu接口来使用多个蜂窝频段。蜂窝标准正在研究V2X双频段并发操作。根据3GPP规范5,6,我们创建了表1,汇总列出V2X服务并发操作使用的频段组合示例,其中分别使用4G LTE和5G新无线电(5G NR)接口蜂窝无线电接入技术。高亮显示的行仅适用于5G NR。
双频段和双RAT V2X系统
在可使用多种无线接入技术(RAT)且能够在多个频段内通信时,汽车OEM必须决定采用哪种。在美国,FCC倾向于(在撰写本文时)使用基于DSRC的无线接入7,8,亚太地区则倾向于开发和部署C-V2X9。欧洲对无线接入技术保持中立10。在这方面,目前已发布了多项研究结果,阐述了ITS-G5/DSRC相对于C-V2X的优势。类似研究也认为C-V2X比ITS-G5更有优势。因此,汽车和电信行业的合作伙伴正在努力开发一种解决方案,使V2X服务能够利用无线接入技术在许可频谱和免许可频谱中提供的优势11。
图4是对图2的修改版,我们在无线接入层和分组接入层之间加了一个新的子层,以详细展示接入层。我们称之为无线接入管理(WAM)。这个子层用于确保从网络向无线电层级提供优化的V2X服务。它可以基于用例(延迟要求、QoS等)、流量(拥堵)和链接(无线电质量)条件通过协调(多样性)或协作(更高吞吐量)选择不同的无线接入技术。例如,如果检测到ITS-G5无线接口中存在拥堵,则会使用C-V2X通过PC5发送相同的消息。这将提供多样性差异化增益并确保可靠性。在车辆交换高密度地图数据这个用例中,可以将Uu接口与PC5或ITS-G5组合使用,以满足高吞吐量要求。
IEEE论文12,13利用分析和仿真方法,详细介绍和探讨了类似概念所具有的优势(如图4所示)。如之前使用表1所述,在C-V2X框架内,蜂窝系统标准化机构已在探讨研究通过5.9 GHz频段内的PC5和ITS-G5技术实现4G LTE Uu和5G NR Uu频段的并发操作。因此,根据前面介绍的频段并发操作和概念,我们可以说标准化机构和相关的工业研究社区已为双频段,甚至是双RAT V2X系统奠定了基础。现在,汽车行业应寻找最佳硬件装置,以利用双频段和双RAT V2X概念的优势。
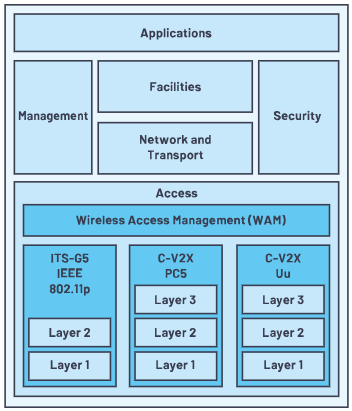
图4. 在ITS接入层实现多种无线电技术之间的协作与协调。
推出适用于未来的V2X系统的单RF IC (ADRV9026)
当今的无线设备已经配备多种无线技术标准,每种标准都要求使用各自独特的模块或硬件。大多数情况下,这些模块提供从RF层到应用层的解决方案。在这种架构中实施这种双频段V2X系统和提供协作和合作机制并不容易,因为这类模块的制造商或供应商并不提供自由访问中间层的权限,而在多种标准之间实现协作或合作需要这种权限。通过可用的无线模块实现这些配置需要使用外部标准化接口。
因此,我们需要支持实现这类系统的设计。使用软件定义无线电(SDR)的无线电发射器和接收器设计让我们能够完全自由地在任何阶段访问和处理数字数据。ADI RadioVerse产品系列包含许多可将RF转化为比特,将比特转化为位的宽带无线电收发器。
这种信号与RF频段和基带之间的转换是基于零中频(ZIF)架构。从根本上说,与基于直接RF采样的转换相比,它要求的功率更低,因为所有电路都在更窄的带宽上工作。此外,由于ZIF放宽了对发送器和接收器的滤波要求,所以使得RF前端更简单、成本更低。
ADRV9026是对RadioVerse产品系列中双频段SDR产品的扩展。这是一款单芯片全集成式RF IC。它有4个发射和4个接收通道,可以独立编程和控制,用于发射和接收75 MHz和6 GHz之间的任何载波频率。接收带宽可高达200 MHz,而发射器合成带宽可高达450 MHz。此外还提供片内观测路径(每条通道的带宽高达450 MHz),以支持高功率传输场景中功率放大器的线性化校正。图5显示整个收发器的功能框图。
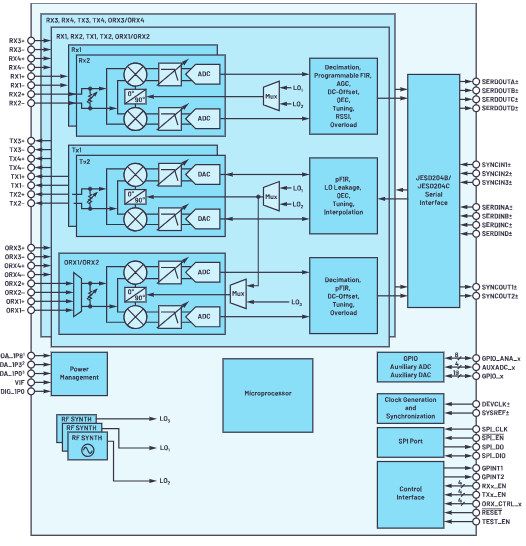
图5. ADI提供的4通道发射器和4通道接收器ADRV9026 RF IC的功能框图。
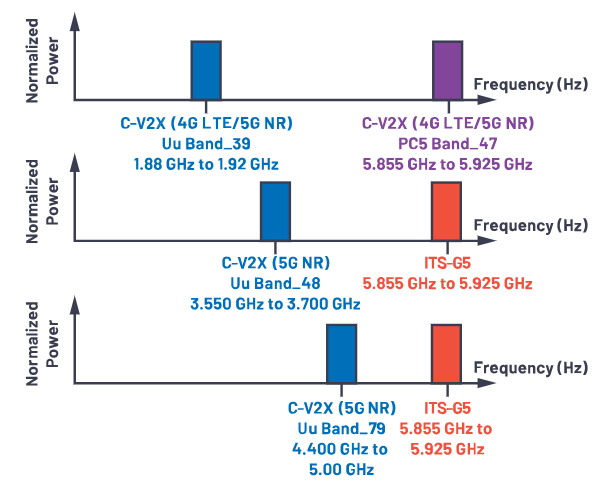
图6. ADRV9026可以同时在多个频段中发送和接收。
ADRV9026使用先进的本地振荡器架构,可以同时在多个6 GHz以下的频段发送和接收。图6显示了使用单个RF IC ADRV9026在不同频段或采用不同无线接入技术同时发送和接收的示例。在这个示例中,我们仅选择三组频段组合。重点突出ADRV9026能在75 MHz和6 GHz之间的任何频段内运行。因为ADRV9026中有4个独立的RF通道,所以我们甚至能用各自独立的频段或技术来实现2 × 2 MIMO功能。在使用ADRV9026时,我们能获得多种优势。
可以灵活选择C-V2X中的任何频段,且无需额外的认证成本。
组合使用多个RAT要求更高的同步性能。使用ADRV9026能够更容易地实现这种同步,因为两个频段都由单个RF IC控制。在“双频段和双RAT V2X系统”一节中,我们讨论了双频段V2X系统的概念,以及如何使用单个RF IC来达成此目的。未来,我们会提供有关这类双频段V2X设备的架构和设计的更多细节。
通过使用ADRV9026,可在非常靠近天线的位置执行RF-比特转换。这可以避免同轴电缆中的RF信号损耗,在5.9 GHz V2X频段中这种损耗相当高。
至于RF性能方面,ADRV9026可以满足无线基站要求。现有的无线模块基于针对终端用户设备开发的ASIC。所以,ADRV9026提供更高的RF性能,因此具有更低的延迟、更高的可靠性和更高的QoS。所有这些指标可提供更高的数据速率和无线吞吐量,从而带来更出色的驾乘体验,以及更高的安全性。
高数据速率和低延迟使驾驶员或自动驾驶系统能够更快地做出反应,为安全相关用例提供更有力的支持。例如,在免许可/专用无线电资源将要达到拥堵限制的大流量场景中,与独立式或单接入系统相比,协作/协调系统(如“双频段和双RAT V2X系统”中所述)可以提供更高的可靠性和更好的安全标准。
所以,需要使用具有认知智能和支持单个RF IC的协作/协调配置来满足V2X用例的要求。ADI公司提供以单个设备(例如ADRV9026)实现此目标的技术。
结论
在本文中,我们介绍了V2X通信当前的发展情况,这是推动实现自动驾驶汽车的关键因素。在这一领域,可以将两种无线技术配合使用以满足V2X服务的关键要求。这两种技术分别是C-V2X和DSRC/ITS-G5,可在许可和免许可频段内运行。实现协调/协作V2X系统有不同的选项可以选择。ADI公司提供支持双频段和双频段无线标准的技术,具有更高的RF性能、更低的延迟、更高的数据速率和更高的可靠性。我们已讨论了如何使用此RF IC来设计V2X通信设备,它可以在两个不同的无线电频段同时针对两种V2X技术提供无线接入。在下一篇文章中,我们将更深入地探讨如何使用基于ADRV9026的设计来展示对多频段V2X通信的支持。
审核编辑:郭婷
-
自动驾驶V2X技术中DSRC和C-V2X技术的进化史2018-02-24 22728
-
在自动驾驶车辆中实现5G和DSRC V2X2022-12-13 4503
-
自动驾驶的到来2017-06-08 7479
-
自动驾驶汽车时代:天线测量与模拟比任何时候都来得关键2019-01-08 2690
-
为何自动驾驶需要5G?2020-06-08 4320
-
在了解车联网之前,你知道V2X是什么吗?2020-06-10 3944
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 4985
-
基于飞凌i.MX8MQ核心板实现V2X方案2020-11-24 2055
-
网联化自动驾驶的含义及发展方向2021-01-12 4959
-
LG电子LTE自动驾驶技术成功演示了V2X安全技术2017-12-11 1224
-
5G在未来自动驾驶汽车方面做出的贡献2020-09-26 2269
-
使用V2X技术实现汽车自动驾驶感知的详细说明2020-11-27 1491
-
东软5G/V2X BOX荣获“量产·智能驾驶类优秀奖”2021-12-18 3125
-
5G车路协同自动驾驶概述与应用2022-07-01 2890
-
在自动驾驶汽车中实现5G和DSRC V2X2022-09-27 2922
全部0条评论

快来发表一下你的评论吧 !
