

步进电机的构造/类型/驱动方法/应用
控制/MCU
描述
步进电机彻底改变了当今世界的机械。这些电机主要用于3D打印机,数控机床,机器人等。步进电机只不过是一种步进移动的直流电机,每一步都可以精确控制。因此,与其他电机相比,步进电机具有高精度,它们还具有高扭矩,可以处理重负载,使其成为机械的理想选择。除此之外,这些电机没有任何像伺服电机那样的反馈机制,并且在开环条件下运行。
步进电机的构造:

步进电机结构与直流电机非常相似。它还有一个永磁体作为转子。转子将位于中心,当力作用在其上时将旋转。该转子被许多定子包围,定子由磁线圈缠绕在其上。定子将尽可能靠近转子放置,以便定子中的磁场可以影响转子的运动。为了控制步进电机,每个定子将依次供电。在这种情况下,定子将磁化并充当电磁极,对转子施加排斥力并推动其移动一步。定子的替代磁化和消磁将逐步移动转子,使其能够很好地控制旋转。
根据定子,它可以分为两种类型。它们是单极和双极步进电机。
单极步进电机:
在单极电机中,每个定子绕组都有中心抽头设置,该装置将连接到Vcc或接地。在此设置中,电流一次仅流向绕组的一半。电流根据连接到 Vcc 或 GND
的内容流入或流出中心抽头端子。当电流通过绕组时,定子将充当磁极。在这里,允许电流通过绕组的一半将使定子成为北极,而通过另一半的电流将感应到南极。这使得电机易于控制和顺时针和逆时针方向操作。绕组两端的简单晶体管足以在两个方向上运行这种类型的步进电机。
尽管具有单极电机的优点,但扭矩较小,无法处理笨重的负载。另外,由于一次只有一半的线圈绕组处于活动状态,定子线圈将更多导致线圈电阻增加。
双极步进电机:
与单极电机相反,双极电机的定子绕组没有中心抽头连接,因此电流将流过整个线圈。您可以通过在一个端子上施加 Vcc
同时将另一个端子接地来强制电流通过线圈。一个方向的电流将使定子成为北极,而相反方向的电流将使其成为南极。与单极电机不同,双极电机需要像H桥这样的特殊布置才能在两个方向上操作它们。双极电机具有高扭矩,可以处理笨重的负载。但是驱动这种电机需要特殊的电路,这可能会增加所涉及的成本。
步进电机也可以根据其结构分为不同的类型。我们将在本教程的后面部分看到这一点,以便更好地理解。
驱动步进电机:

步进电机由于其结构复杂,需要特殊的电路来驱动它们。驱动步进电机的方法有很多种。在本教程中,我们将介绍驱动电机的最常见方法。为了解释,我们将考虑四相步进电机。
单励磁模式:

这是驱动步进电机的最基本方法,使用不多,但仍然值得了解以了解步进电机的驱动。在这种方法中,每个相邻的相或定子将依次使用特殊电路逐个激活。这会使定子磁化和消磁,导致转子一次一步地运动。
全步驱动:
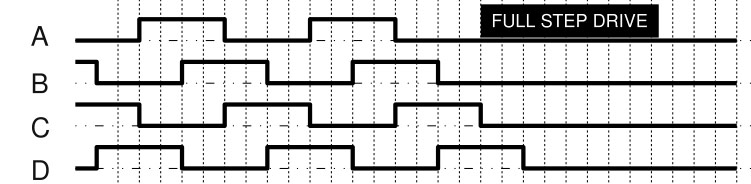
在这种方法中,不是一次激活一个定子,而是激活两个定子,它们之间间隔很短的时间。在此模式下,任何两个定子都将处于活动状态。这意味着第一个定子打开,第二个定子将在短时间间隔后打开,而第一个定子仍然打开。这种方法产生高扭矩,并使电机能够驱动高负载。
半步驱动:

此方法与全步进驱动非常相似。在这里,两个相邻放置的定子将首先被激活,第三个定子将被激活;这两个定子被停用。这个循环首先激活两个定子,然后一个定子重复以驱动步进电机。这种方法可以提高电机的分辨率,同时降低扭矩。
微步进:

由于其准确性,这是最常用的驾驶方法。驱动电路以正弦波形的形式向定子线圈提供可变步进电流。这些微小的步进电流平滑地大大提高了每个步进的精度。这种方法被广泛使用,因为它提供了很高的精度并在很大程度上降低了操作噪音。
基于结构的步进电机类型:
有不同类型的步进电机,其结构和工作的复杂性各不相同。在本教程中,我们将看到一些基本类型及其构造。
永磁步进电机:

在该电机中,永磁体用作转子和周围的电磁定子。这是我们在上面的例子中看到的电机。在这里,定子将被磁化和消磁以移动转子并使电机旋转。
可变磁阻步进电机:

该电机使用铁磁转子和电磁定子与线圈绕组进行磁化。在这里,转子将有多个突起,也称为齿,其作用类似于磁极。这种步进电机基于磁阻工作,因此得名。当电流通过定子极时,它将磁化并拉动转子的突出极,其方式是它们之间的距离最小且完全对齐。驱动电路将继续磁化定子,使转子旋转。
混合式同步步进电机:

这是上述两种电机的永久和可变磁阻步进电机的组合。该电机由永磁齿形转子组成,就像永磁步进电机中的转子一样,其中有一组北极和南极。也就像可变不阻电机一样,定子里面有齿。定子的几个齿将与转子的齿对齐,而其他齿不会相互对齐。当定子通过向其提供电流而磁化时,磁通量驱动转子移动一步。定子和转子中齿的存在会改变磁通量并按预期逐步驱动电机。
混合同步电机最受欢迎,因为它具有高扭矩和分辨率。半步等驱动模式甚至可以提高该电机的分辨率。而全步或微步可用于增加扭矩,精度和平稳工作。混合动力电机因其具有的优势而最受欢迎,但由于其结构复杂,成本很高。
步进电机要寻找的特性:
这些是您需要在步进电机中寻找的一些重要特性。
分辨率
旋转角度
工作电压
力矩
速度
步进电机的应用:
打印机
数控机床
3D打印机
激光和光学
工业机械
-
步进电机驱动相关的知识2022-10-19 3077
-
步进电机最简单的驱动方法2021-07-12 7833
-
步进电机有哪些类型2020-04-19 4292
-
步进电机驱动器调速方法_步进电机驱动器的作用2020-04-20 13105
-
步进电机零位标定的方法2021-03-16 9231
-
步进电机的类型和接线2022-02-19 1076
-
步进电机的驱动方式与特征2023-02-24 2646
-
步进电机最简单的驱动方法_步进电机控制方法2023-03-08 17236
-
步进电机的驱动与控制 恒压驱动 恒流驱动2023-03-20 1233
-
步进电机知识科普(工作原理/构造/控制方法/用途/类型)2023-04-26 2188
-
步进电机基础知识:类型、用途和工作原理2023-08-02 3036
-
arduino如何驱动步进电机2024-01-14 5838
-
步进电机工作原理 步进电机最简单的驱动方法2024-02-04 3466
-
步进电机的驱动方法有哪些2024-06-05 4053
-
步进电机驱动器有哪些类型?该如何分类?2024-10-24 2235
全部0条评论

快来发表一下你的评论吧 !
