

加速度传感器的原理及使用方法
描述
1. 什么是加速度?
在您用微控制器创建作品的时候,是不是经常遇到希望作品根据“运动”而执行相应动作的情况?例如,当摇动它时颜色会发生变化,当倾斜它时会发出声音……在这种情况下,通常可以使用所谓的“加速度传感器”来实现。加速度传感器也分为不同的类型。
那么,加速度传感器可以测量的“加速度”到底是什么样的物理量呢?可能很多人会理解为“运动”或“冲击强度”,下面让我们先来了解一下加速度。当您打开物理教科书时,上面通常会这样写着:
物体位置随时间的变化(时间微分)就是速度(单位:[m/s])
物体速度随时间的变化(时间微分),即位移对时间的二阶微分就是加速度(单位: [m/s2])
用公式来表达时是这样的(不擅长公式的可以忽略。准确地说,x、v、a通常是三维向量):
相对于位置x,速度v=dx/dt,加速度a=d2 x/dt2
另外,该加速度a与施加在物体上的力F成正比。也就是说,如果物体的质量是m,那么F=ma(称为“运动方程”)。
换句话说,只要能检测出加速度,就可以求得施加在物体上的力。
重力加速度
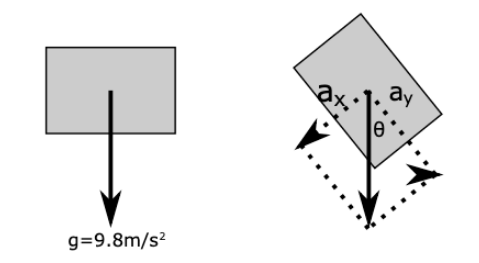
顺便提一下,由于重力也是作用在物体上的力,因此也会产生加速度(重力加速度:9.8[m/s2])。换言之,通过测量静止(准确地说是加速度为零=匀速运动)物体的三维加速度,可以知道该物体相对于水平面的倾斜度(方向)。
此外,微分和积分是互逆运算的关系,因此,如果对位置进行微分计算,将得到速度值;如果对速度进行积分计算,则得到位置值。另外,对加速度进行两次积分可以获得位置值。也就是说,只要能测量出加速度,就可以求得物体的速度和位置。
获取物体位置的方法有多种,例如,如果是在户外,可以使用GPS进行测量,不过也有通过加速度求位置的方法。这种方法称为“航位推测(Dead Reckoning)法”,但实际上精度不是太高(因为这是通过数值计算来进行时间积分的,所以误差会累积),而且用很长时间求位置并不方便实际应用(多通过其他方法定期校正来使用)。
2. 与陀螺仪和罗盘配套使用
陀螺仪
经常与加速度传感器配套使用的传感器有“陀螺仪”和“罗盘”。
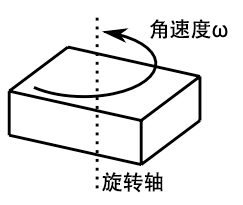
陀螺仪用来测量旋转物体的转速(角速度),在测量物体的方向和运动时,通常与加速度传感器结合使用。另外,罗盘通过检测地磁来测量方向(方位),其原理与指南针相同。与其他传感器不同,它的一个主要特点是可以测量相对于北方或南方的朝向(朝向的绝对值),而使用加速度传感器和陀螺仪,只能得到从开始测量时的变化量=相对值。
顺便提一下,加速度传感器与陀螺仪相结合的传感器通常称为“六轴传感器”,再配上罗盘的传感器通常称为“九轴传感器”。加速度、陀螺仪(角速度)和罗盘(方位)都是在三维空间中具有x、y、z三个分量的产品,都是三轴传感器。
3. 加速度传感器的使用方法
抱歉,基础知识类的内容有点长了。我想大家已经知道可以用加速度传感器测量哪些物理量了,下面我们来了解一下实际使用方法。例如,在Switch Science网站可以买到Grove标准的模块,与Arduino和Raspberry Pi等配合使用很方便。
与微控制器配合使用时的使用方法与其他传感器大致相同,例如,与Arduino配合使用时,流程通常是先安装库,然后打开示例草图并运行。
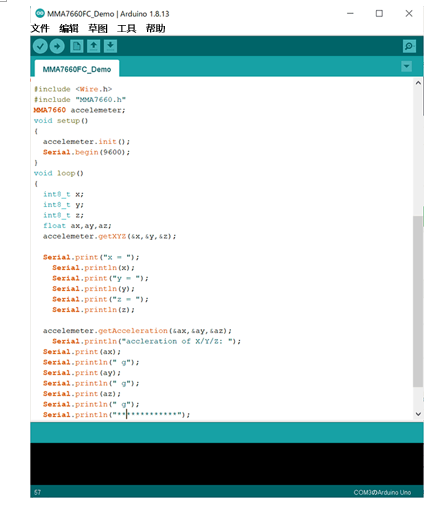
Arduino的加速度传感器示例草图例
顺便提一下,过去根据加速度的大小输出电压的产品类型(模拟输出)很多,这类产品必须使用x、y、z轴三个轴的A/D转换器(模拟输入端口)。然而,最近大部分产品都可以像其他传感器一样直接连接I2C总线使用了。
4. 加速度传感器的原理
直到最近,加速度传感器才变得更易于使用。这是因为微细加工技术的进步在其中发挥了重要作用。
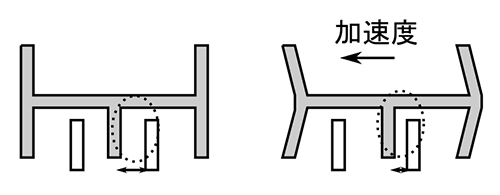
加速度传感器的原理
加速度传感器的测量需要使用上图所示的结构。当施加加速度时,就会被施加因加速度产生的力(惯性力),从而产生变形。这样,图中虚线包围部分的距离会发生变化。这部分可以看成是两个导体相对的结构,也就是一个电容器,其距离的改变意味着电容器的电容量发生了变化。可能有些人还记得在高中物理中学过的平行板电容器C的公式C=ε S/d。
测量电容器容量变化的方法有很多。其中包括测量振荡电路频率变化的方法,以及测量恒流充电时电压变化的方法。电容器的电压V可以根据与存储的电荷Q的关系,通过V=Q/C求得。
在半导体芯片内部形成这种结构的技术称为“MEMS(Micro Electro Mechanical Systems)”,随着半导体加工和制造技术的进步,在1990年左右达到了投入实际应用的水平。使用这种技术可以制作约10μm的非常小的结构。这使得在半导体芯片上不仅可以创建电气电路和电子电路,还可以创建处理力等物理量的结构。
第一款采用这种MEMS结构的加速度传感器产品是ADI公司于1993年推出的ADXL50。
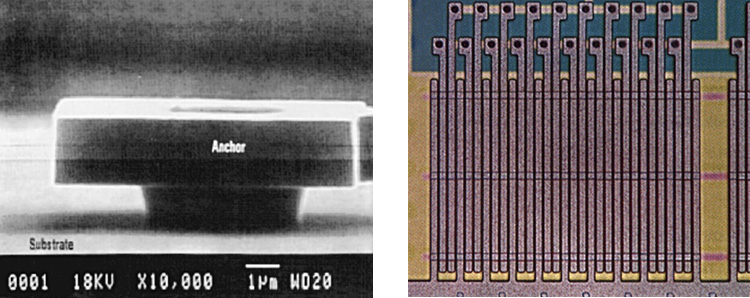
ADI公司ADXL50的传感器部分
一旦能够将MEMS集成到半导体芯片中,处理从中获得的信号就是电子电路的擅长领域了。随着半导体芯片中集成的功能越来越多,比如放大、降噪、A/D转换,甚至与I2C等数字控制信号的接口,最近的产品已经能够很轻松地进行高精度测量了。
顺便提一下,前面介绍的角速度传感器陀螺仪也采用了MEMS结构。角速度是通过角速度产生的“科里奥利力”引起的结构变形来测量的。
5. 扩展到气压计和麦克风
具有MEMS结构的传感器还有其他产品。例如,测量大气压的气压传感器也测量压力带来的结构变形。如今,这些气压传感器也变得越来越易于使用。
另外,最近越来越多拾取空气中振动(即音源)的麦克风也开始采用MEMS结构。MEMS结构的麦克风比以前常用的动圈式和电容式麦克风更小型、更便宜。其中,模拟电压输出和脉冲密度根据音量而变化的PDM(Pulse Density Modulation=脉冲密度调制)输出的产品比较多。
-
什么是加速度传感器?加速度传感器如何工作2012-02-02 4678
-
加速度传感器的应用详解2016-12-07 3288
-
加速度传感器种类和应用2018-04-28 3987
-
加速度传感器应用详解2018-11-07 2639
-
加速度传感器的原理2018-11-08 2166
-
加速度传感器原理2018-11-09 2340
-
加速度传感器是什么2019-03-15 4440
-
加速度传感器介绍2019-05-15 2347
-
加速度传感器的选型2020-08-11 4958
-
加速度传感器原理与应用简介2009-11-25 4072
-
什么是加速度传感器2010-04-01 2524
-
加速度传感器的分类和原理是怎样的?该如何正确选择加速度传感器?2018-07-10 7978
-
三轴加速度传感器原理_三轴加速度传感器应用2019-10-17 20529
-
加速度传感器有哪几种,加速度传感器如何选择参数2023-07-25 9525
-
加速度传感器原理及其应用2024-01-05 5664
全部0条评论

快来发表一下你的评论吧 !
