

MindSDK中FlexCAN驱动程序及样例工程
描述
引言
前文介绍了FlexCAN外设模块,一种典型的CAN总线引擎子系统的工作机制。那么,用户在软件开发平台对CAN总线引擎进行编程,需要根据硬件外设模块的功能进行建模,将对CAN总线通信引擎的操作封装起来,让开发者通过软件开发平台的数据结构和用户可编程应用接口(API)函数使用FlexCAN模块。基于灵动微电子微控制器的软件开发平台MindSDK,包含了集成FlexCAN外设的MM32F5270和MM32F0140微控制器,其中就有FlexCAN外设模块的驱动程序以及样例工程,以及对CAN总线通信协议CANopen的适配工程。本文将介绍MindSDK中FlexCAN驱动程序及样例工程,展现一种典型的CAN总线驱动程序的实现及应用场景。
从MindSDK获取FlexCAN驱动程序
通过MindSDK在线发布网站选择搭载了MM32F0140微控制器的POKT-F0140开发板,就可以得到MM32F0140微控制器的软件开发包。如图x所示。
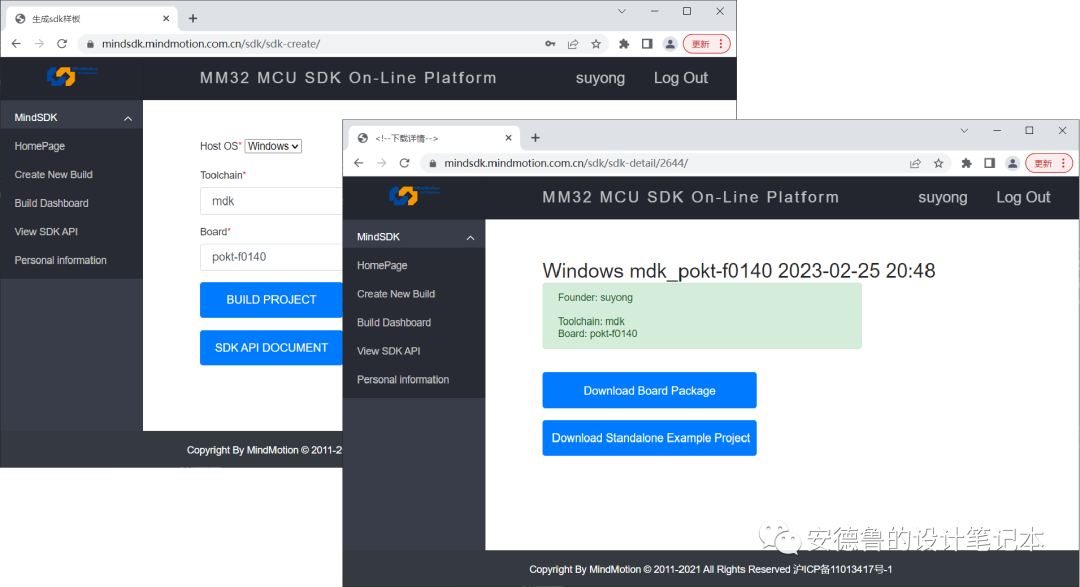
figure-mindsdk-pokt-f0140-download-package-1
图x 在MindSDK在线网站现在MM32F0140软件包下载的软件开发包后pokt-f0140_mdk.zip,其中就包含了FlexCAN的驱动程序源码,具体就是hal_flexcan.h和hal_flexcan.c两个源文件。如图x所示。
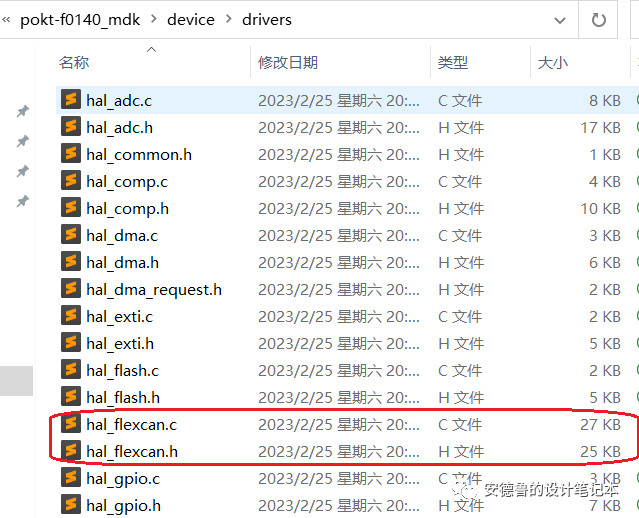
figure-mindsdk-pokt-f0140-flexcan-driver-files
图x FlexCAN驱动程序源码## 数据结构
这里列写FlexCAN驱动程序中的主要数据结构。
配置通信引擎的结构体类型
FLEXCAN_Init_Type类型的结构体的变量,用于在初始化FlexCAN总线引擎时传入配置参数。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_Init() to initialize the general setting of FLEXCAN.
*/
typedef struct
{
uint8_t MaxXferNum; /*!< Max number of message buffer to be used. */
uint32_t BitRate; /*!< Data bit per second when using FLEXCAN for transmision and reception. */
uint32_t ClockFreqHz; /*!< Clock source frequency. */
FLEXCAN_ClockSource_Type ClockSource; /*!< Clock source selection. */
FLEXCAN_SelfWakeUp_Type SelfWakeUp; /*!< Stop mode self wake up source. */
FLEXCAN_WorkMode_Type WorkMode; /*!< FLEXCAN function mode. */
FLEXCAN_Mask_Type Mask; /*!< Filter work range for filtering the received frames. */
FLEXCAN_TimConf_Type * TimConf; /*!< FLEXCAN timer and time synchronization setup. */
bool EnableSelfReception; /*!< Whether to receive frames sent by FLEXCAN itself. */
bool EnableTimerSync; /*!< Refresh the timer every frame reception. */
} FLEXCAN_Init_Type;
其中,FLEXCAN_TimConf_Type类型用于指定FlexCAN总线位时间的配置参数。关于如何配置CAN总线的位时间,后续将有专门文章详解。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_SetTimingConf() to initialize the time configuration.
*/
typedef struct
{
bool EnableExtendedTime; /*!< If enable, the setting time range can be broader. */
uint32_t PhaSegLen1; /*!< Phase segment 1. */
uint32_t PhaSegLen2; /*!< Phase segment 2. */
uint32_t PropSegLen; /*!< Propagation segment. Compensate for signal delays across the network.*/
uint32_t JumpWidth; /*!< Resynchronize jump width. */
uint32_t PreDiv; /*!< The divider for FLEXCAN clock source. */
} FLEXCAN_TimConf_Type;
访问MB的结构体类型
FLEXCAN_Mb_Type类型的结构体,建立了对MB在物理存储空间的映射结构,软件使用该类型的结构体整体传入或读出硬件MB存储区中的内容。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_WriteTxMb() to set the mask for buffer.
*/
typedef struct
{
struct
{
uint32_t TIMESTAMP : 16; /*!< Free-running counter time stamp. */
uint32_t LENGTH : 4; /*!< Length of Data in Bytes. */
uint32_t TYPE : 1; /*!< Frame data type or remote type. */
uint32_t FORMAT : 1; /*!< Frame extended format or standard format. */
uint32_t RESERVED_0 : 1; /*!< Reservation. */
uint32_t IDHIT : 9; /*!< Id filter number hit by fifo. */
};
struct
{
uint32_t ID :29; /*!< Frame Identifier. */
uint32_t PRIORITY: 3; /*!< Local priority. */
};
union
{
struct
{
uint32_t WORD0; /*!< CAN Frame payload word0. */
uint32_t WORD1; /*!< CAN Frame payload word1. */
};
struct
{
/* The sequence refers to the little-endian-storage and big-endian transfer. */
uint8_t BYTE3; /*!< CAN Frame payload byte3. */
uint8_t BYTE2; /*!< CAN Frame payload byte2. */
uint8_t BYTE1; /*!< CAN Frame payload byte1. */
uint8_t BYTE0; /*!< CAN Frame payload byte0. */
uint8_t BYTE7; /*!< CAN Frame payload byte7. */
uint8_t BYTE6; /*!< CAN Frame payload byte6. */
uint8_t BYTE5; /*!< CAN Frame payload byte5. */
uint8_t BYTE4; /*!< CAN Frame payload byte4. */
};
};
} FLEXCAN_Mb_Type;
FLEXCAN_RxMbConf_Type类型的结构体,用于配置在MB中配置接收帧的部分属性,这相当于是FLEXCAN_Mb_Type的轻量级版本,但不需要数据负载、数据长度、本地优先级等配置信息。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_SetRxMb() to set the mask for buffer.
*/
typedef struct
{
FLEXCAN_MbType_Type MbType; /*!< Data frame or Remote frame switcher. */
FLEXCAN_MbFormat_Type MbFormat; /*!< Extended or standard id switcher. */
uint32_t Id; /*!< Id value. */
} FLEXCAN_RxMbConf_Type;
FLEXCAN_MbCode_Type枚举类型指定了可用的CODE命令。
/*!
* @brief FLEXCAN Xfer MB frame code switcher.
*/
typedef enum
{
/* rx. */
FLEXCAN_MbCode_RxInactive = 0u, /*!< Code for MB being not active. */
FLEXCAN_MbCode_RxFull = 2u, /*!< Code for MB being full. */
FLEXCAN_MbCode_RxEmpty = 4u, /*!< Code for MB being active and empty. */
FLEXCAN_MbCode_RxOverrun = 6u, /*!< Code for MB being over written without accessing the received frame. */
FLEXCAN_MbCode_RxRanswer = 10u, /*!< Code for Rx waiting for remote frame. */
FLEXCAN_MbCode_RxBusy = 15u, /*!< Code for Rx updating MB. */
/* rx. */
FLEXCAN_MbCode_TxInactive = 8u, /*!< Code for data response for Tx inactive. */
FLEXCAN_MbCode_TxAbort = 9u, /*!< Code for Tx abort after transmission. */
FLEXCAN_MbCode_TxDataOrRemote = 12u, /*!< Code for data frame or remote frame transmission. */
FLEXCAN_MbCode_TxTanswer = 14u, /*!< Code for data response for remote frame. */
} FLEXCAN_MbCode_Type;
配置ID过滤器的结构体类型
FLEXCAN_RxMbMaskConf_Type可以用于配置全局ID过滤器和MB专属ID过滤器。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_SetGlobalMbMaskConf() to set the mask for buffer.
*/
typedef struct
{
FLEXCAN_MbType_Type MbType; /*!< Data frame or Remote frame switcher. */
FLEXCAN_MbFormat_Type MbFormat; /*!< Extended or standard id switcher. */
uint32_t IdMask; /*!< Id mask. */
} FLEXCAN_RxMbMaskConf_Type;
FIFO相关的结构体类型
FLEXCAN_RxFifoConf_Type类型用于在启用FIFO功能时,配置FIFO的属性。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_EnableRxFifo() to initialize the fifo setting.
*/
typedef struct
{
FLEXCAN_FifoIdFilterFormat_Type FilterFormat; /*!< fifo filter format which will decide how to filter the fifo reception. */
uint32_t IdFilterNum; /*!< The fifo filter element num. */
uint32_t * IdFilterTable; /*!< Filter array to be set for Rx fifo. */
FLEXCAN_FifoPriority_Type priority; /*!< Enable matching process start with fifo. */
} FLEXCAN_RxFifoConf_Type;
当使用FIFO时,需要使用FLEXCAN_RxFifoMaskConf_Type结构体类型的变量配置ID过滤器。
/*!
* @brief This type of structure instance is used to keep the settings when calling the @ref FLEXCAN_SetRxFifoGlobalMaskConf() to set the conf for fifo mask filter.
*/
typedef struct
{
FLEXCAN_MbType_Type MbType; /*!< Data frame or Remote frame switcher. */
FLEXCAN_MbFormat_Type MbFormat; /*!< Extended or standard id switcher. */
FLEXCAN_FifoIdFilterFormat_Type FilterFormat; /*!< fifo filter format. */
union
{
uint32_t RxIdA; /*!< The fifo Id setting for filter format A. */
uint16_t RxIdB[2]; /*!< The fifo Id setting for filter format B. */
uint8_t RxIdC[4]; /*!< The fifo Id setting for filter format C. */
};
} FLEXCAN_RxFifoMaskConf_Type;
还有更多枚举类型和宏常量,可继续查阅hal_flexcan.h源文件。
API清单
FlexCAN驱动的API相对较多,这里做了个分类,便于快速索引。更详细的内容可见源码。
配置通信引擎的API
使用FlexCAN外设之前需要初始化驱动引擎。
void FLEXCAN_Enable(FLEXCAN_Type * FLEXCANx, bool enable);
void FLEXCAN_DoSoftReset(FLEXCAN_Type * FLEXCANx);
bool FLEXCAN_Init(FLEXCAN_Type * FLEXCANx, FLEXCAN_Init_Type * init);
void FLEXCAN_SetTimingConf(FLEXCAN_Type * FLEXCANx, FLEXCAN_TimConf_Type * conf);
void FLEXCAN_EnableFreezeMode(FLEXCAN_Type * FLEXCANx, bool enable);
访问MB的API
这一组API中,第二个参数channel,对应的是MB列表中的索引,FlexCAN中有16个MB,对应channel的取值可以是0-15。FlexCAN外设中MB的内存区是ECC的,在使用之前必须通过FLEXCAN_ResetMb()函数复位选定的MB。
void FLEXCAN_ResetMb(FLEXCAN_Type * FLEXCANx, uint32_t channel);
void FLEXCAN_SetMbCode(FLEXCAN_Type * FLEXCANx, uint32_t channel, FLEXCAN_MbCode_Type code);
void FLEXCAN_SetRxMb(FLEXCAN_Type * FLEXCANx, uint32_t channel, FLEXCAN_RxMbConf_Type * conf);
bool FLEXCAN_WriteTxMb(FLEXCAN_Type * FLEXCANx, uint32_t channel, FLEXCAN_Mb_Type * mb);
bool FLEXCAN_ReadRxMb(FLEXCAN_Type * FLEXCANx, uint32_t channel, FLEXCAN_Mb_Type * mb);
配置ID过滤器的API
ID过滤器分为全局过滤器和MB专属的过滤器,对应有各自的过滤码(掩码)。
void FLEXCAN_SetGlobalMbMaskConf(FLEXCAN_Type * FLEXCANx, FLEXCAN_RxMbMaskConf_Type * conf);
void FLEXCAN_SetRxMbIndividualMaskConf(FLEXCAN_Type * FLEXCANx, uint32_t channel, FLEXCAN_RxMbMaskConf_Type * conf);
中断和状态的API
FlexCAN的中断和状态标志位分别面向FlexCAN引擎和MB,另外还有一些属性状态,例如计数器、CRC值等。
void FLEXCAN_EnableInterrupts(FLEXCAN_Type * FLEXCANx, uint32_t interrupts, bool enable);
uint32_t FLEXCAN_GetStatus(FLEXCAN_Type * FLEXCANx);
void FLEXCAN_ClearStatus(FLEXCAN_Type * FLEXCANx, uint32_t flags);
void FLEXCAN_EnableMbInterrupts(FLEXCAN_Type * FLEXCANx, uint32_t interrupts, bool enable);
uint32_t FLEXCAN_GetMbStatus(FLEXCAN_Type * FLEXCANx);
void FLEXCAN_ClearMbStatus(FLEXCAN_Type * FLEXCANx, uint32_t mbs);
uint32_t FLEXCAN_GetTxError(FLEXCAN_Type * FLEXCANx);
uint32_t FLEXCAN_GetRxError(FLEXCAN_Type * FLEXCANx);
uint32_t FLEXCAN_GetMatchCrcValue(FLEXCAN_Type * FLEXCANx, uint32_t * channel);
FIFO相关的API
在配置好FlexCAN引擎后,通过FLEXCAN_EnableRxFifo()函数启用FIFO功能,之后就可以以FIFO的方式访问MB。
bool FLEXCAN_EnableRxFifo(FLEXCAN_Type * FLEXCANx, FLEXCAN_RxFifoConf_Type * conf);
void FLEXCAN_SetRxFifoGlobalMaskConf(FLEXCAN_Type * FLEXCANx, FLEXCAN_RxFifoMaskConf_Type * conf);
bool FLEXCAN_ReadRxFifo(FLEXCAN_Type * FLEXCANx, FLEXCAN_Mb_Type * mb);
void FLEXCAN_EnableFifoDMA(FLEXCAN_Type * FLEXCANx, bool enable);
uint32_t FLEXCAN_GetFifoAddr(FLEXCAN_Type * FLEXCANx);
样例工程
MindSDK为FlexCAN驱动设计了一些样例工程,用于演示在一些典型场景中使用FlexCAN的方法。这些样例工程也可以运行在搭载MM32F0140微控制器的POKT-F0140开发板上。见表x。
表x MindSDK中的FlexCAN驱动样例工程清单

回环通信 flexcan_loopback
FlexCAN外设的回环通信功能,就是将FlexCAN外设模块的Tx信号和Rx信号在模块内部,由软件配置电路连通,可用于验证在未接入CAN总线网络时,节点软件本身能否正常收发通信帧。当完成验证后,仅需要通过软件关闭回环通信功能,即可用已经验证过的收发过程同外部CAN总线网络对接。
flexcan_loopback样例工程中的源码,展示了使用FlexCAN模块回环通信的方法。除了启用了回环通信的功能之外,其余对CAN通信帧的发送操作和接收操作同正常对外通信无异,因此,本工程也是使用FlexCAN驱动收发CAN通信帧的最基础的用例。另外,由于使用了回环通信,不需要专门准备发送和接收两块运行不同程序的电路板,仅用一块开发板即可完成实验。
在flxcan_loopback样例工程的main()函数中,除了必要的初始化微控制器的时钟、引脚和后台人机交互端口外,先初始化了FlexCAN模块,然后在while(1)循环中,先准备一组数据作为CAN通信帧的数据负载发送出去,等待发送完成后,再接收一个CAN通信帧,等待接收完成后打印到终端显示接收帧中的数据负载,周而复始。发送帧和接收帧的ID使用同一个 APP_FLEXCAN_XFER_ID,因此可以实现收发。
/*
* Variables.
*/
volatile bool app_flexcan_rx_flag = false; /* Flag the message buffer reception state. */
FLEXCAN_Mb_Type app_flexcan_rx_mb; /* For message buffer rx frame storage. */
uint8_t app_flexcan_tx_buf[APP_FLEXCAN_XFER_BUF_LEN]; /* The flexcan tx buffer for tx mb frame preparation. */
uint8_t app_flexcan_rx_buf[APP_FLEXCAN_XFER_BUF_LEN]; /* The flexcan rx buffer for rx mb frame storage. */
/*
* Declerations.
*/
void app_flexcan_init(void); /* Setup flexcan. */
void app_flexcan_tx(uint8_t *tx_buf); /* Send frame. */
void app_flexcan_read(uint8_t *rx_buf); /* Receive frame. */
/*
* Functions.
*/
int main(void)
{
BOARD_Init();
printf("\\r\\nflexcan_loopback example.\\r\\n");
/* Setup the flexcan module.*/
app_flexcan_init();
printf("press any key to send loop back frame with id 0x%x.\\r\\n", (unsigned)APP_FLEXCAN_XFER_ID);
while (1)
{
getchar();
/* Send a message through flexcan. */
for (uint8_t i = 0u; i < APP_FLEXCAN_XFER_BUF_LEN; i++)
{
app_flexcan_tx_buf[i] = ( app_flexcan_tx_buf[i] + i) % 256u;
}
app_flexcan_tx(app_flexcan_tx_buf);
printf("app_flexcan_tx() done.\\r\\n");
/* Wait for reception. */
while (!app_flexcan_rx_flag) /* This flag will be on when the Rx interrupt is asserted. */
{
}
app_flexcan_rx_flag = false;
printf("app_flexcan_read(): ");
for (uint8_t i = 0u; i < APP_FLEXCAN_XFER_BUF_LEN; i++)
{
printf("%u ", (unsigned)app_flexcan_rx_buf[i]);
}
printf("\\r\\n\\r\\n");
}
}
其中,初始化FlexCAN模块的函数 app_flexcan_init(),初始化了FlexCAN通信引擎,包括配置CAN总线通信的位时钟,配置好了发送MB和接收MB,分别使用两个不同的MB索引BOARD_FLEXCAN_TX_MB_CH和BOARD_FLEXCAN_RX_MB_CH,并分别设定它们为有效的非激活状态。最后还启用了发送完成和接收到数据帧的中断。虽然这里也可以使用纯粹的轮询标志位实现流控制,但使用中断方式便于向后续用例中过渡。在中断服务程序中,当检测到有接收帧时,从接收帧的MB中搬运接收到的数据负载到内存变量app_flexcan_rx_buf中,然后清接收标志位。有实现代码如下:
/* Setup the flexcan module. */
void app_flexcan_init(void)
{
/* Set bit timing. */
FLEXCAN_TimConf_Type flexcan_tim_conf;
flexcan_tim_conf.EnableExtendedTime = true;
flexcan_tim_conf.PhaSegLen1 = 5u;
flexcan_tim_conf.PhaSegLen2 = 1u;
flexcan_tim_conf.PropSegLen = 2u;
flexcan_tim_conf.JumpWidth = 1u;
/* Setup flexcan. */
FLEXCAN_Init_Type flexcan_init;
flexcan_init.MaxXferNum = APP_FLEXCAN_XFER_MaxNum; /* The max mb number to be used. */
flexcan_init.ClockSource = FLEXCAN_ClockSource_Periph; /* Use peripheral clock. */
flexcan_init.BitRate = APP_FLEXCAN_XFER_BITRATE; /* Set bitrate. */
flexcan_init.ClockFreqHz = BOARD_FLEXCAN_CLOCK_FREQ; /* Set clock frequency. */
flexcan_init.SelfWakeUp = FLEXCAN_SelfWakeUp_BypassFilter; /* Use unfiltered signal to wake up flexcan. */
flexcan_init.WorkMode = FLEXCAN_WorkMode_LoopBack; /* Normal workmode, can receive and transport. */
flexcan_init.Mask = FLEXCAN_Mask_Global; /* Use global mask for filtering. */
flexcan_init.EnableSelfReception = true; /* Must receive mb frame sent by self. */
flexcan_init.EnableTimerSync = true; /* Every tx or rx done, refresh the timer to start from zero. */
flexcan_init.TimConf = &flexcan_tim_conf; /* Set timing sychronization. */
FLEXCAN_Init(BOARD_FLEXCAN_PORT, &flexcan_init);
/* Set tx mb. */
FLEXCAN_ResetMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH);
FLEXCAN_SetMbCode(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH, FLEXCAN_MbCode_TxInactive);
/* Set rx mb. */
FLEXCAN_RxMbConf_Type flexcan_mb_conf;
flexcan_mb_conf.Id = APP_FLEXCAN_XFER_ID; /* Id for filtering with mask and receiving. */
flexcan_mb_conf.MbType = FLEXCAN_MbType_Data; /* Only receive standard data frame. */
flexcan_mb_conf.MbFormat = FLEXCAN_MbFormat_Standard;
FLEXCAN_SetRxMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_CH, &flexcan_mb_conf);
FLEXCAN_SetMbCode(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_CH, FLEXCAN_MbCode_RxEmpty); /* Set for receiving. */
/* Enable intterupts for rx mb. */
FLEXCAN_EnableMbInterrupts(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_INT, true);
NVIC_EnableIRQ(BOARD_FLEXCAN_IRQn);
}
/* Interrupt request handler. */
void BOARD_FLEXCAN_IRQHandler(void)
{
if (0u!= (FLEXCAN_GetMbStatus(BOARD_FLEXCAN_PORT) & BOARD_FLEXCAN_RX_MB_STATUS) )
{
/* Read the message. */
app_flexcan_read(app_flexcan_rx_buf);
/* Clear flexcan mb interrupt flag. */
FLEXCAN_ClearMbStatus(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_STATUS);
/* Update the flag. */
app_flexcan_rx_flag = true;
}
}
其中,flexcan_init.WorkMode = FLEXCAN_WorkMode_LoopBack;即指定启用了回环模式。
发送数据帧的操作被封装成app_flexcan_tx() 函数。在该函数中,将即将发送的数据填充到MB结构体的数据负载中,再将整个帧结构写入到FlexCAN硬件的MB内存区,最后过向发送MB的内存区写命令码,启动发送过程。注意,这里使用预分配的帧ID(而不是作为函数传参可配置),发送数据帧(而不是远程帧)。有源代码如下:
/* Send a message frame. */
void app_flexcan_tx(uint8_t * tx_buf)
{
/* Prepare the mb to be sent. */
FLEXCAN_Mb_Type mb;
mb.ID = APP_FLEXCAN_XFER_ID; /* Indicated ID number. */
mb.TYPE = FLEXCAN_MbType_Data; /* Data frame type. */
mb.FORMAT = FLEXCAN_MbFormat_Standard; /* STD frame format. */
mb.PRIORITY = APP_FLEXCAN_XFER_PRIORITY; /* The priority of the frame mb. */
mb.BYTE0 = tx_buf[0]; /* Set the data payload. */
mb.BYTE1 = tx_buf[1];
mb.BYTE2 = tx_buf[2];
mb.BYTE3 = tx_buf[3];
mb.BYTE4 = tx_buf[4];
mb.BYTE5 = tx_buf[5];
mb.BYTE6 = tx_buf[6];
mb.BYTE7 = tx_buf[7];
mb.LENGTH = APP_FLEXCAN_XFER_BUF_LEN; /* Set the size of data payload. */
FLEXCAN_WriteTxMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH, &mb);
/* Write code to send. */
FLEXCAN_SetMbCode(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH, FLEXCAN_MbCode_TxDataOrRemote);
}
接收数据帧的操作被封装成app_flexcan_read()函数。这里执行的操作,仅仅是从预定的FlexCAN硬件的接收MB内存区中把整个MB读出来,然后从MB结构类型中提取数据负载,作为传参返回给函数调用者。有源代码如下:
/* Receive a message frame. */
void app_flexcan_read(uint8_t *rx_buf)
{
/* Read the info from mb and reconstruct for understanding. */
FLEXCAN_ReadRxMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_CH, &app_flexcan_rx_mb);
rx_buf[0] = app_flexcan_rx_mb.BYTE0;
rx_buf[1] = app_flexcan_rx_mb.BYTE1;
rx_buf[2] = app_flexcan_rx_mb.BYTE2;
rx_buf[3] = app_flexcan_rx_mb.BYTE3;
rx_buf[4] = app_flexcan_rx_mb.BYTE4;
rx_buf[5] = app_flexcan_rx_mb.BYTE5;
rx_buf[6] = app_flexcan_rx_mb.BYTE6;
rx_buf[7] = app_flexcan_rx_mb.BYTE7;
}
板对板直接通信 flexcan_b2b_tx & flexcan_b2b_rx
板对板直接通信的用例,需要两块开发板,一个作为接收方,另一个作为发送方,由发送方发送CAN通信帧到接收方,从而实现两块电路板通过CAN总线传输数据的过程。这个实验的样例工程同基本的flexcan_loopback工程非常相近,只是收发过程拆分成两个独立的工程。注意,收发两个工程中使用CAN通信帧的ID也是约定一致的。
相对于flexcan_loop工程,独立的flexcan_b2b_rx和flexcan_b2b_tx工程中对FlexCAN模块的初始化过程,不再启用回环模式,而是常规模式。见源代码如下:
/* Set up the flexCAN module. */
void app_flexcan_init(void)
{
...
/* Setup FlexCAN. */
FLEXCAN_Init_Type flexcan_init;
...
flexcan_init.WorkMode = FLEXCAN_WorkMode_Normal; /* Normal workmode, can receive and transport. */
...
FLEXCAN_Init(BOARD_FLEXCAN_PORT, &flexcan_init);
...
}
接收方电路板运行flexcan_b2b_rx工程的程序:初始化FlexCAN通信引擎后,配置接收MB,开中断等待接收帧完成。在后台的FlexCAN中断服务程序中,一旦捕获到约定ID的通信帧,就将接收帧中的数据负载转存到内存中的app_flexcan_rx_buf变量中,并且通过标志变量app_flexcan_rx_flag告知前台程序,然后清除硬件标志位。在前台的while(1)循环中,一旦接收到约定ID的通信帧,就在终端界面打印出接收到帧的数据内容。
发送方电路板运行flexcan_b2b_tx工程的程序:初始化FlexCAN通信引擎后,配置发送MB,开中断等待发送帧完成。前台的while(1)循环中,由用户触发向发送MB填充数据负载,并发送预定帧数据的操作。在后台的FlexCAN中断服务程序中,一旦发送完成约定ID的通信帧,就通过标志变量app_flexcan_tx_flag告知前台程序,然后清除硬件标志位。
运行实验时,电脑同时接入发送方和接收方的两个终端界面,先在发送方的终端界面中输入任意字符启动发送帧过程,将有CAN通信帧从发送方上传CAN总线,接收方亦会从总线上捕获到约定同一ID的数据帧,解析出其中的数据负载再显示到接收方的终端界面上。
板对板请求远程帧通信 flexcan_b2b_req & flexcan_b2b_ack
板对板请求远程帧通信的用例,需要两块开发板,一个作为请求方,另一个作为响应方,由请求方发送CAN通信远程帧到应答方,应答方收到远程帧后,准备好数据帧,再将响应的数据帧发送至CAN总线,由请求方捕获,从而实现两块电路板通过CAN总线读数据的过程。相对于板对板直接通信的写数据过程,板对板请求远程帧通信过程实现的是读数据过程。这个实验的样例工程同基本的flexcan_loopback工程,以及板对板直接通信的两个工程非常相近,只是收发过程拆分成两个独立的工程,并且原来的发送方先发出远程帧再接收数据帧,而原来的接收方将先等待远程帧再发送数据帧。注意,收发两个工程中使用CAN通信帧的ID也是约定一致的。
请求方和响应方的两个工程,同flexcan_loopback工程对FlexCAN引擎的初始化过程完全相同,并且在各自的工程中,也需要处理发送和接收过程。不同之处仅在于其中的一个通信帧从数据帧变成的远程帧。
响应方电路板运行flexcan_b2b_ack工程的程序:初始化FlexCAN通信引擎后,配置接收MB,配置发送MB,开中断等待发送和接收帧完成。其中接收MB的帧类型为远程帧FLEXCAN_MbType_Remote。
void app_flexcan_init(void)
{
...
/* Set rx mb. */
FLEXCAN_RxMbConf_Type flexcan_mb_conf;
flexcan_mb_conf.Id = APP_FLEXCAN_XFER_ID; /* Id for filtering with mask and receiving. */
flexcan_mb_conf.MbType = FLEXCAN_MbType_Remote; /* Only receive remote data frame. */
flexcan_mb_conf.MbFormat = FLEXCAN_MbFormat_Standard;
FLEXCAN_SetRxMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_CH, &flexcan_mb_conf);
FLEXCAN_SetMbCode(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_RX_MB_CH, FLEXCAN_MbCode_RxEmpty); /* Set for receiving. */
...
}
请求方电路板运行flexcan_b2b_req工程的程序:初始化FlexCAN通信引擎后,配置接收MB,配置发送MB,开中断等待发送和接收帧完成。在发送请求帧时,设定MB的帧类型为远程帧FLEXCAN_MbType_Remote。
/* Send a message frame. */
void app_flexcan_req()
{
FLEXCAN_Mb_Type mb;
mb.ID = APP_FLEXCAN_XFER_ID; /* Indicated ID number. */
mb.TYPE = FLEXCAN_MbType_Remote; /* Setup remote frame. */
mb.FORMAT = FLEXCAN_MbFormat_Standard; /* STD frame format. */
mb.PRIORITY = APP_FLEXCAN_XFER_PRIORITY; /* The priority of the frame mb. */
mb.LENGTH = APP_FLEXCAN_REQ_BUF_LEN; /* Set the workload size. */
FLEXCAN_WriteTxMb(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH, &mb); /* Send. */
/* Write code to send. */
FLEXCAN_SetMbCode(BOARD_FLEXCAN_PORT, BOARD_FLEXCAN_TX_MB_CH, FLEXCAN_MbCode_TxDataOrRemote);
}
当运行通信过程时:先启动应答方的程序,准备好响应过程;再请求方的程序,发出请求的远程帧到CAN总线上,应答方从CAN总线上捕获到请求的远程帧后,在本机生成数据负载组,使用同远程帧相同的ID,装成数据帧,再上传至CAN总线;请求方此时可以捕获到CAN总线上的同ID的数据帧,显示到终端界面。周而复始。
总结
MindSDK中设计的FlexCAN驱动程序,对FlexCAN外设进行了建模,创建了一系列数据结构和API,能够为软件开发者提供初始化FlexCAN通信引擎,通过MB的结构类型发送数据帧、远程帧等功能。MindSDK为FlexCAN驱动设计的一些样例工程,演示了在一些典型应用场景中(回环通信、板对板直接通信、板对板请求远程帧通信)使用FlexCAN驱动的方法。
-
如何为IMX8启用/驱动CAN/Flexcan?2023-04-17 876
-
求分享IMX8MP Cortex M7 FreeRTOS FlexCAN驱动程序2023-04-20 646
-
求分享FlexCAN FreeRTOS驱动程序2023-04-21 526
-
WINCE驱动程序开发指南2008-07-07 1223
-
RTL8139网卡驱动程序分析2008-10-19 1241
-
VxWorks下PC/104-CAN驱动程序设计2009-04-16 921
-
Windows CE下GPIO驱动程序的设计与应用2010-01-06 745
-
Linux设备驱动程序的编写2011-05-25 707
-
WinCE的OLED驱动程序设计2012-03-26 2709
-
Linux设备驱动程序的平台驱动程序和字符驱动程序介绍2018-11-27 5289
-
MindSDK应用基础—TIM模块样例2023-06-29 2224
-
MindSDK为MM32实现了一组TIM样例工程2023-06-30 1686
-
MindSDK应用基础—SPI模块样例简介2023-08-10 2256
-
MindSDK应用基础—ADC模块样例2023-08-17 2334
-
MindSDK应用基础——TIM模块样例2023-10-25 1607
全部0条评论

快来发表一下你的评论吧 !
