

汽车线控制动技术路线与思考
描述
01
线控制动技术路线
国内新能源汽车日益普及,由于这类汽车缺乏真空源,因此大规模采用了BBW (Brake By Wire)线控制动技术。
预计在未来五年内,受新能源汽车需求的推动,线控制动技术在国内市场的占有率将接近50%。电液制动方案将逐步升级至EMB制动方案,虽然EMB已成为技术开发的趋势,但其实用化仍需克服一定的挑战和距离。

EMB电机制动 需依靠外部真空泵或发动机,为真空助 力器提供动力源 需要依靠液压管路产生制动力 无法能量回收 制动踏板不解耦,ABS触发时踏板抖动 对于自动驾驶提供的支持较有限线控制动技术路线
02
汽车行业里的线控制动技术
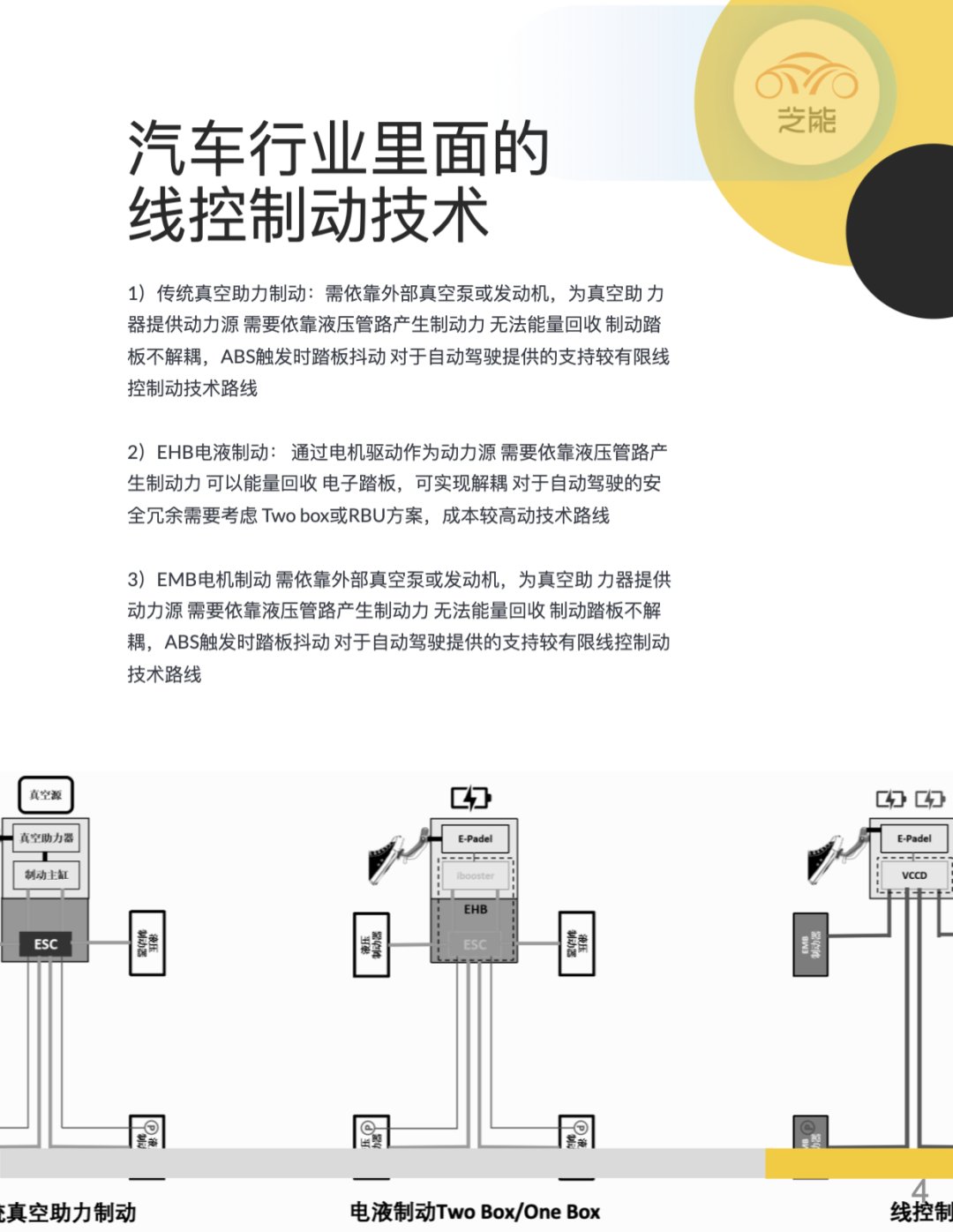
●传统真空助力制动
这种制动系统依赖外部真空泵或发动机为真空助力器提供动力源。制动力由液压管路产生,但不能实现能量回收。制动踏板与系统未解耦,导致在ABS触发时踏板会出现抖动。此外,这种制动系统对自动驾驶的支持性有限。
● EHB电液制动
该技术通过电机驱动作为动力源,通过液压管路产生制动力,但可以实现能量回收。其电子踏板实现了解耦,为自动驾驶提供了较高的支持。但需要考虑安全冗余,使用Two box或RBU方案,成本相对较高。
●EMB电机制动
与传统真空助力制动相似,该技术需依靠外部真空泵或发动机为真空助力器提供动力源,通过液压管路产生制动力,不能实现能量回收。制动踏板未解耦,导致在ABS触发时踏板会抖动。此技术对自动驾驶的支持性也相对有限。
03
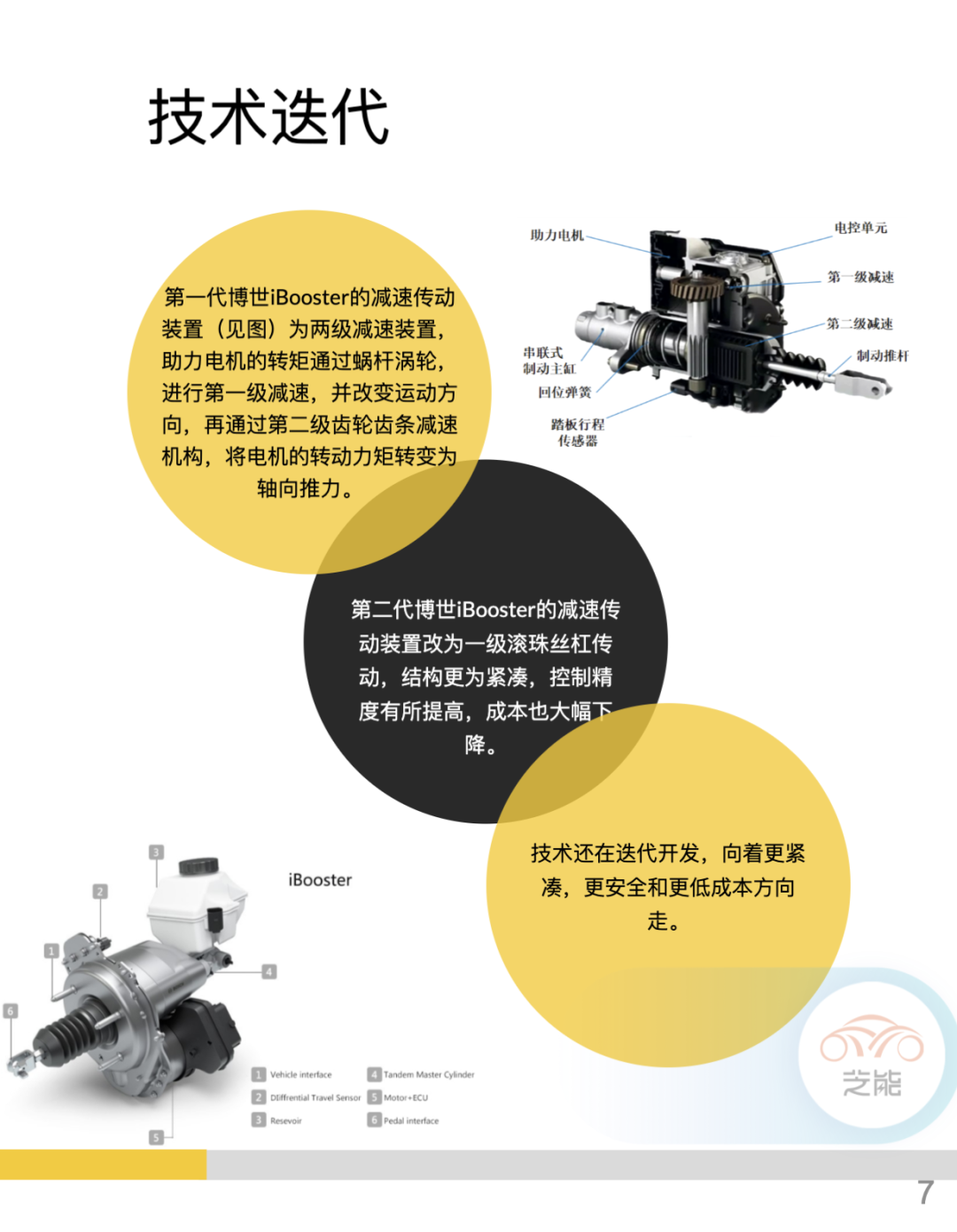
EHB的技术迭代
在第一代博世iBooster中,减速传动装置包括两级减速机构(见图)。首先,助力电机的转矩通过蜗杆涡轮进行第一级减速,并同时改变运动方向。然后,第二级齿轮齿条减速机构进一步降低速度,将电机的旋转力矩转化为轴向推力。
第二代博世iBooster对减速传动装置进行了改良,采用了一级滚珠丝杠传动机构。这种改变使得结构更加紧凑,控制精度得以提高,同时也显著降低了成本。
04
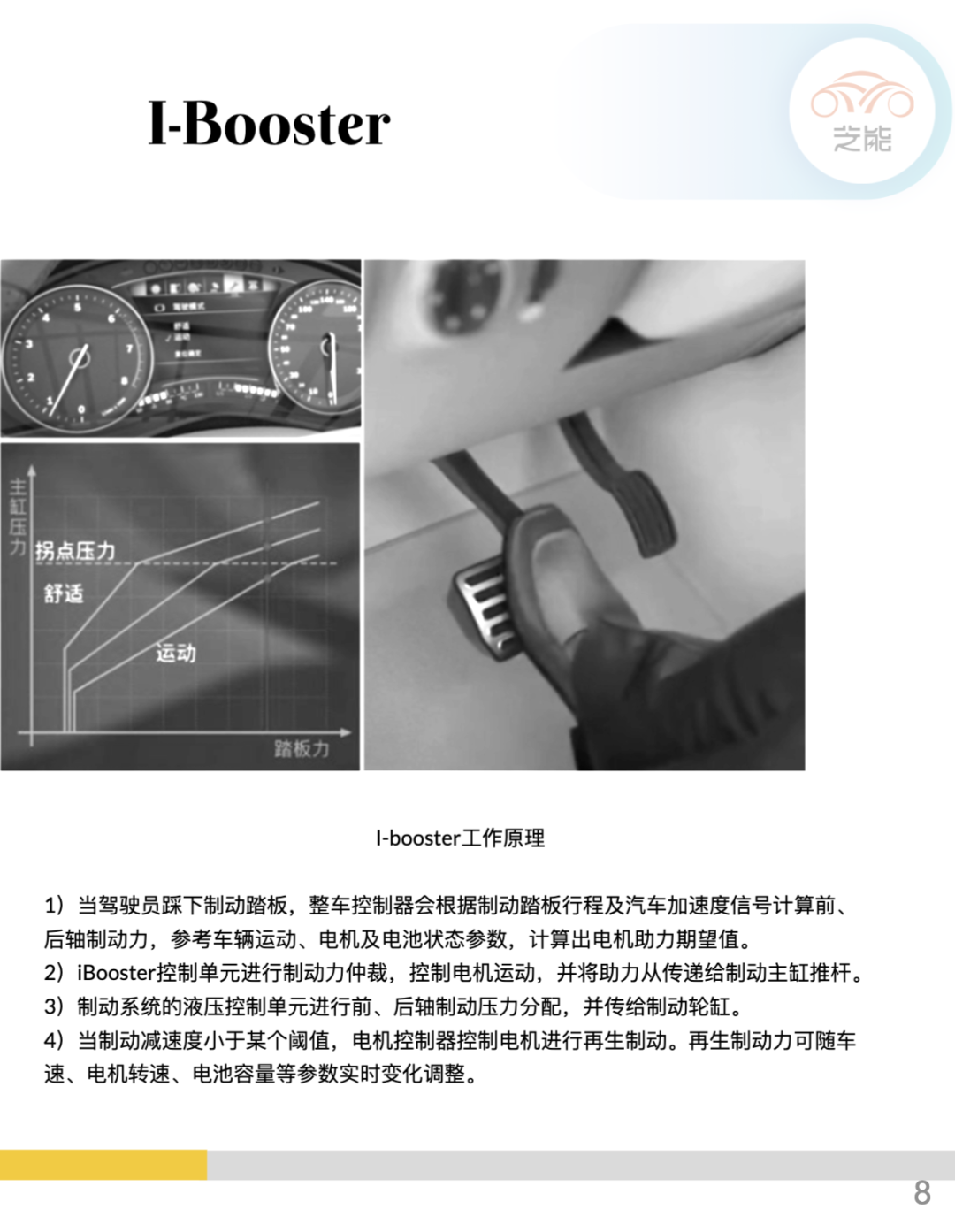
I-booster工作原理
● 当驾驶员按下制动踩板时,整车的控制系统会根据制动踩板的行程和车辆的加速度信号来计算前后轴的制动力。同时,系统会参考车辆的运动状态、电机状态和电池状态参数来计算出电机助力的期望值。
● 接着,iBooster的控制单元会进行制动力仲裁,并控制电机的运动。然后,电机的助力会通过传递系统传递到制动主缸的推杆。
● 制动系统的液压控制单元负责分配前后轴的制动压力,并将这些压力传递给制动轮缸。
● 当制动的减速度低于设定的阈值时,电机控制器会控制电机进行再生制动。再生制动力可以根据车速、电机转速、电池容量等参数进行实时调整。
05
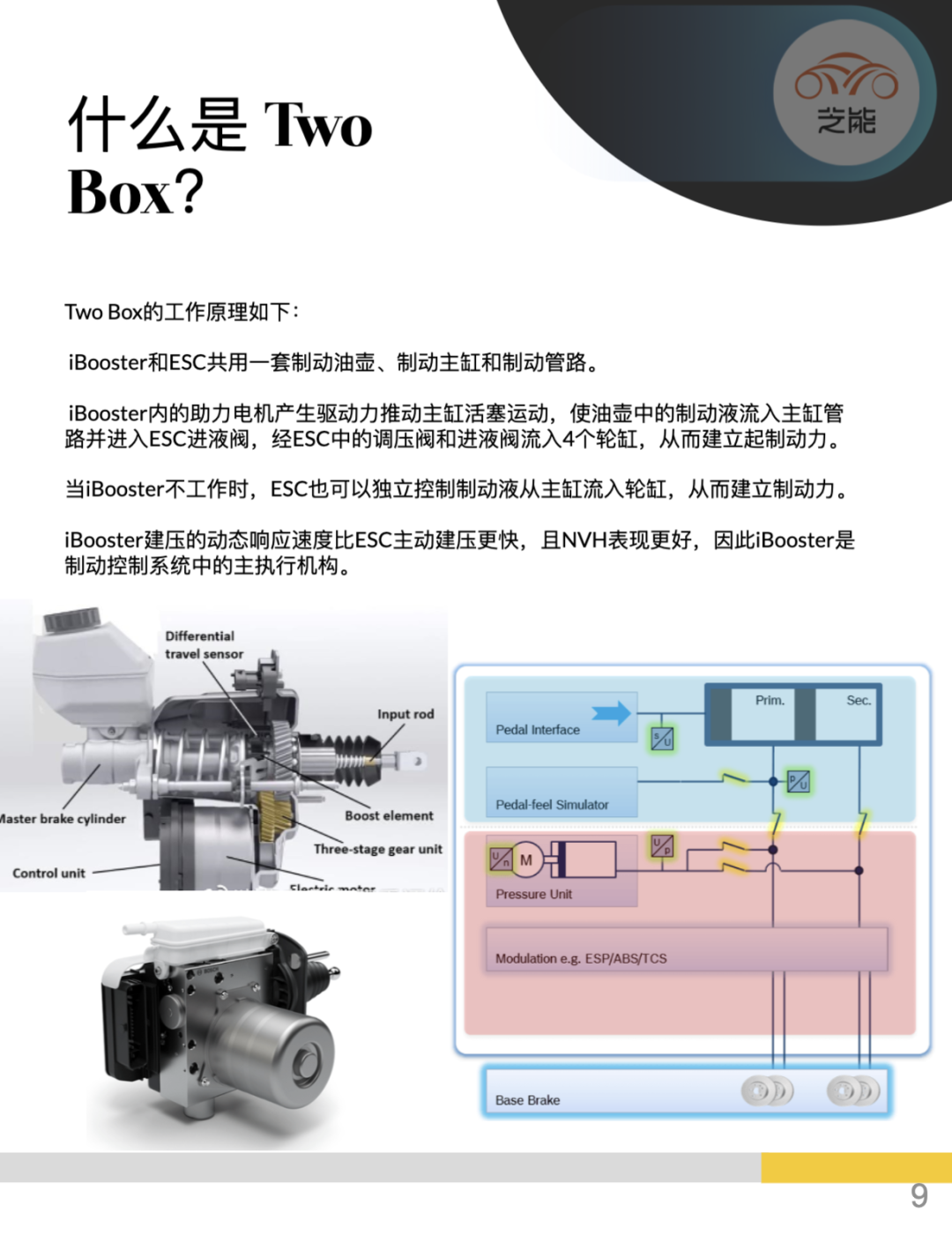
Two Box的工作原理
在Two Box系统中,iBooster和ESC共享同一套制动油壶、制动主缸和制动管路。
其中,iBooster内部的助力电机产生动力,推动主缸活塞运动,使得制动油壶中的液体流入主缸管路,然后进入ESC的进液阀。接下来,制动液通过ESC内部的调压阀和进液阀,流入四个轮缸,从而产生制动力。
当iBooster不工作时,ESC仍然能够独立地控制制动液从主缸流入轮缸,从而产生制动力。
不过,由于iBooster建立压力的动态响应速度比ESC主动建立压力的速度更快,且噪声、振动和刺耳声(NVH)的表现更好,因此,iBooster在制动控制系统中是主要的执行机构。
06
总结
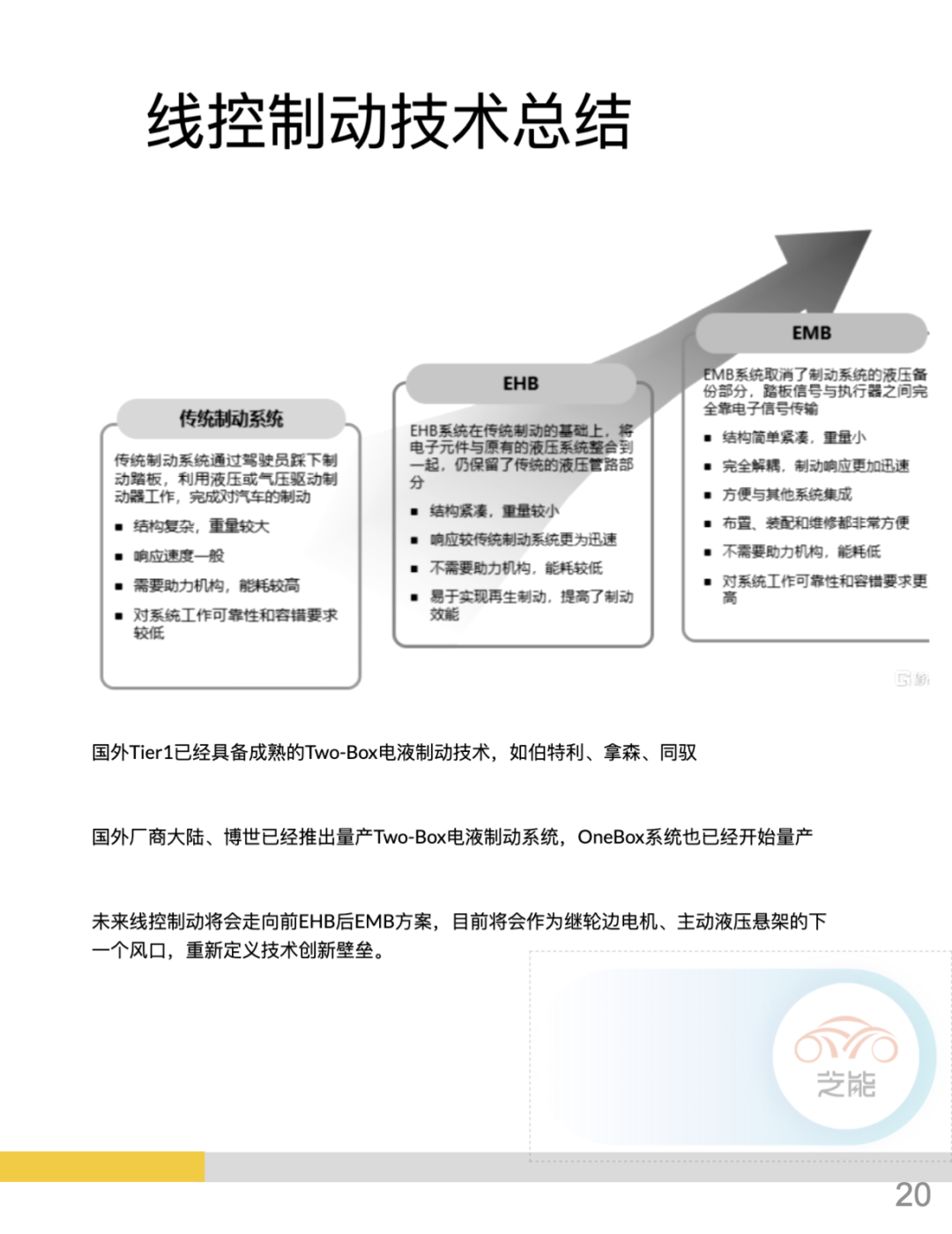
国外的一级供应商(Tier1)如伯特利、拿森和同驭已经掌握了成熟的Two-Box电液制动技术。同时,国外的大陆和博世公司已经推出了量产的Two-Box电液制动系统,同时他们的OneBox系统也已经开始量产。
未来的线控制动预计将发展为前EHB后EMB的配置。这将成为轮边电机和主动液压悬架之后的下一个发展热点,并重新定义技术创新壁垒。
责任编辑:彭菁
-
T-booster2.0商用车线商用车线控制动控制动解决方案2022-07-22 3234
-
汽车电动化过程中的转变:线控制动2023-05-31 3287
-
CPLD在汽车制动性能检测系统中的应用2009-04-16 3681
-
汽车防抱制动系统自寻优控制器设计2009-11-26 4830
-
汽车电子技术的应用方向-汽车车身网络系统2015-08-17 16116
-
关于汽车线控制动系统和线控转向系统总结的太棒了2021-05-14 5266
-
什么是电动汽车电制动控制系统2010-03-17 3485
-
什么是线控制动2022-10-31 5559
-
经纬恒润线控制动系统,助力新能源智能汽车发展2022-11-22 956
-
英创汇智线控制动的原理技术分析2023-04-25 698
-
线控制动系统(EWBS)2022-01-24 2612
-
线控转向技术路线的优点2023-06-26 3003
-
迈来芯线控制动技术应用案例2023-12-22 1969
-
经纬恒润线控制动系统,新能源智能汽车的未来标配2024-03-05 1655
-
亚太股份:线控制动系统迈入量产阶段2024-05-13 1699
全部0条评论

快来发表一下你的评论吧 !
