

如何使用IC555控制伺服电机的方向
控制/MCU
描述
伺服电机是一种可以精确控制角度方向的电子设备。当涉及到以精确角度移动或旋转物体时,伺服电机是此类应用的最佳选择。它由一个简单的直流电机和位置反馈系统组成,用于确定电机位置。我们将使用可以360º旋转的连续旋转伺服器。使用微控制器控制伺服电机是一种常见的做法。然而,在这个伺服电机控制电路中,我们将使用定时器芯片IC555来控制它的方向。
伺服电机:
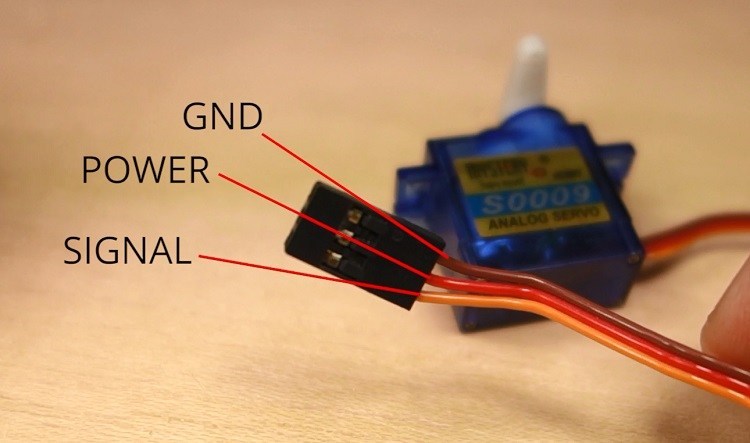
所有伺服系统都需要 3 个引脚来操作 VCC、GND 和 SIG 引脚。SIG 引脚需要一个 PWM(脉宽调制)信号来调整伺服的旋转角度。
伺服电机控制电路:

我们在非稳态多谐振荡器配置中使用非常流行的 555 定时器
IC,以便能够产生所需的脉冲。与微控制器相比,555定时器IC非常便宜,并且不需要任何编程。在这里,我们修改非稳态多谐振荡器以改变IC
555产生的输出脉冲的宽度。
PWM输入信号:
首先,让我们谈谈我们需要的信号。因此,正如我们之前所说,它是50Hz的PWM信号。因此,时间段将为 1/50 秒或 20
毫秒。舵机的角度根据信号的ON时间段而变化,我们将使用电位计进行设置。
 电路工作原理:
电路工作原理:
我们都必须熟悉 555
计时器的非稳定配置。我们需要调整占空比,使其能够产生20ms时间段的控制脉冲。但与此同时,我们需要修改输出脉冲的宽度。因此,我们为此目的引入了POT
VR1,二极管D1,D2和电阻R2。因此,当电路上电时,电容器通过电阻R1充电,充电电流流过POT
VR1并继续为C2充电,因为二极管D1允许电流通过,同时二极管D2阻止该电流流过R2。在电容器 C2 充电期间,555 的输出将处于高电平状态。
T准时:
此高状态的时间由公式确定
T ON = 0.693 x ( R1 + VR1 ) C2
假设VR1调整为9K,将上述公式中的值代入将产生
T ON = 0.693 x ( 1K + 8K ) 0.33uF
= 0.693 ( 9k ) 0.33uF
= 2 毫秒
因此,当您将电位器调整为 8K 时,脉冲的导通时间将接近 2ms,因此伺服将旋转约 180。
T关闭时间:
当经过2ms的导通时间时,IC 555的输出将切换到低电平状态。在这种状态下,电容器开始通过POT VR1放电,并进入二极管D2到IC
7的引脚555。为了确定 TOFF 时间,我们可以使用 POT VR1 和 R2 的值。POT
VR1将展示42K的放电电流,因为它能够展示8K的充电电流(50K – 8K = 42K)。
TOFF = 0.693 x ( R2 + VR1 ) C2
= 0.693 x ( 36K + 42K ) 0.33uF
= 0.693 x ( 78K ) 0.33uF = 17.8 ms
上述结果显示关闭时间约为 18ms。
总结开机和关机时间:
如果将这些组件与电路一起使用时,将上述电路的ON和OFF时间相加,则会导致脉冲宽度为20ms,这是控制伺服电机的可接受的脉冲时间段。并且由于导通时间为2ms,伺服电机将旋转180。
因此,在此电路中,当您调整VR1时,ON时间和OFF时间会有所不同,但总时间段将保持不变,为20ms。因此,使用电位计VR1可以毫无问题地控制伺服电机的旋转角度。
注意:
大多数伺服通常在4.5v至6v之间工作。
-
基于IC555的自动晚灯电路2024-02-25 2252
-
深度剖析IC555的工作原理2023-07-05 5052
-
基于IC555的直流电机速度控制电路2023-07-03 5171
-
基于IC555的PWM LED调光电路2023-07-02 4398
-
使用IC555电路构建雾化器2023-06-30 2271
-
基于IC555的伺服电机驱动电路2023-06-18 1639
-
基于IC555自动闭帘电路2023-04-08 2237
-
基于IC555设计的双音门铃电路2023-03-19 6681
全部0条评论

快来发表一下你的评论吧 !
