

单片机的内存映射图解析
描述
一、如何控制单片机?
单片机的内存映射图解析
这里以STM32F429芯片为例,讲解下单片机芯片内存映射图。从此图中可以看到芯片的外设被分配了512M的空间,然而真正的外设其实没有使用到512M的内存空间。
然后我们操作外设时,只需要操作它对应的内存地址即可。更加详细的外设内存地址,可以参考芯片的用户手册(不是数据手册)的Memory map章节。
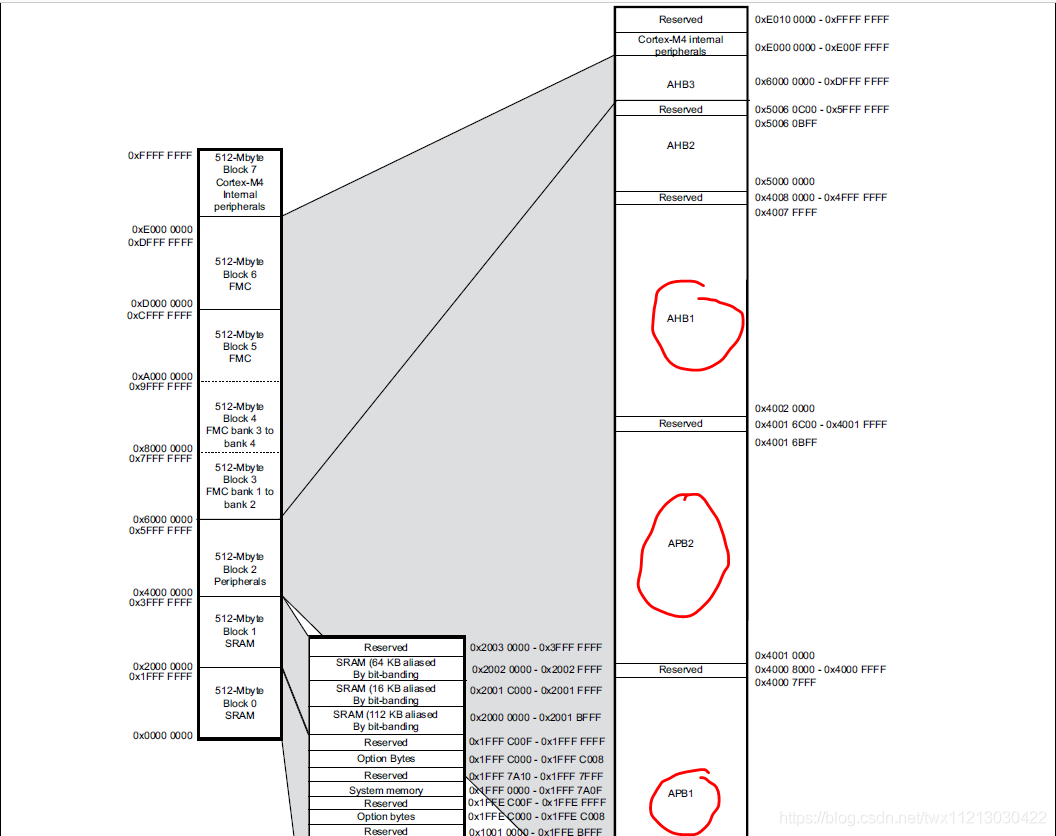
因为单片机是将外设映射到内存地址上,所以我们可以像操作内存一样来操作外设(写/读)。
我们在操作内存时是通过地址来进行操作的,由于单片机已经将外设与内存进行了映射,所以我们在操作单片机外设时只需要操作外设映射的内存地址就行。
内存如何操作?
在C语言中操作内存,我们可以用指针来进行操作。在汇编语言中由于没有指针这个概念,所以我们在操作地址时只能用一些内存读写指令来完成。比如:LDR,STR
结构体操作与宏定义操作的对比
C语言——宏定义形式
#define GPIOA (*(volatile uint32_t *)(0x000800E0))
#define GPIOA_DR (*(volatile uint32_t *)(0x000800E4))
#define GPIOA_MR (*(volatile uint32_t *)(0x00080108))
#define GPIOA_TR (*(volatile uint32_t *)(0x00080108))
C语言——结构体操作
struct GPIOA_Reg{
volatile uint32_t dr;
volatile uint32_t mr;
volatile uint32_t tr;
}GPIOA_REG
汇编语言操作内存
LDR r0, =0x00800010
MOV r1, #2
STR r1, [r0]
二、寄存器方式操作单片机
代码结构框架:
文件结构
一个芯片头文件:外设的地址宏定义以及外设相关的结构体定义
查看芯片的用户手册(注意:不是数据手册)中寄存器对应的相应地址。然后使用宏定义来将它们定义好,同时定义好结构体来更加方便的管理外设寄存器组。这里以STM32F1系列为例
- • 一个启动文件:汇编编写的、中断向量表等
- • 用户代码文件:剩余就是用户代码文件了
- • 各个芯片的外设驱动函数编写(读/写、控制)、以及用户逻辑部分代码。
三、使用HAL库方式操作单片机
HAL库与固件库的区别
HAL全称Hardware abstract layer(硬件抽象层),这是一个大家公认并且遵守的一种函数名称命名、资源定义。因为是统一的命名规范,所以当用户更换芯片平台后由于函数命名与所使用的资源都与具体硬件没有关系,这样就不需要修改用户层代码了。
而所谓的标准库其实就是芯片厂商公司内部自己命名与实现的库并且各个厂商的命名规则不一样,这样就会导致可移植性变差。当用户更换了芯片平台后由于它们各自的API函数不一样就会导致用户需要修改应用层代码。
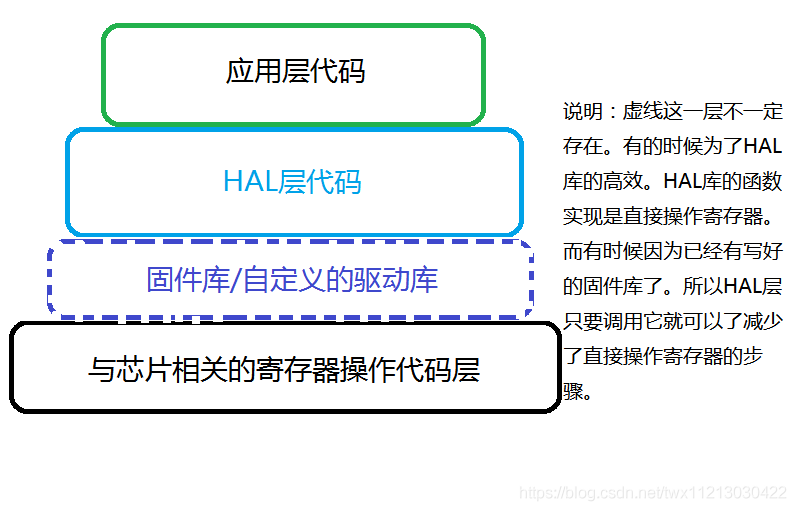
HAL库设计
1. HAL框架设计
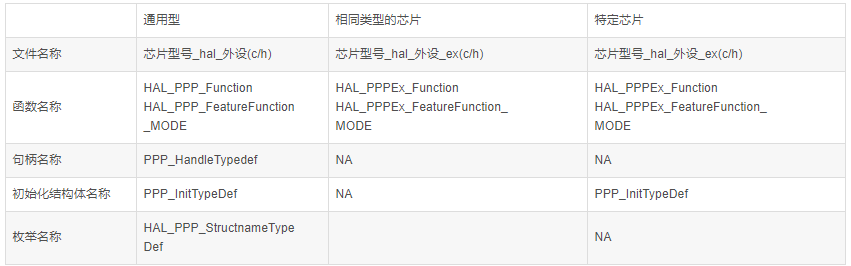
2. HAL资源命名规则
HAL函数命名规则:
中断与时钟设置宏:
回调函数命名规则:
3. 文件结构:
一个芯片头文件:外设的地址宏定义以及外设相关的结构体定义
查看芯片的用户手册(注意:不是数据手册)中寄存器对应的相应地址。然后使用宏定义来将它们定义好,同时定义好结构体来更加方便的管理外设寄存器组。这里以STM32F1系列为例
一个启动文件:汇编编写的、中断向量表等。
一个HAL库全局头文件:一些全局的宏定义以及包含其他外设头文件
HAL库文件:芯片外设的驱动函数
四、HAL库组成说明
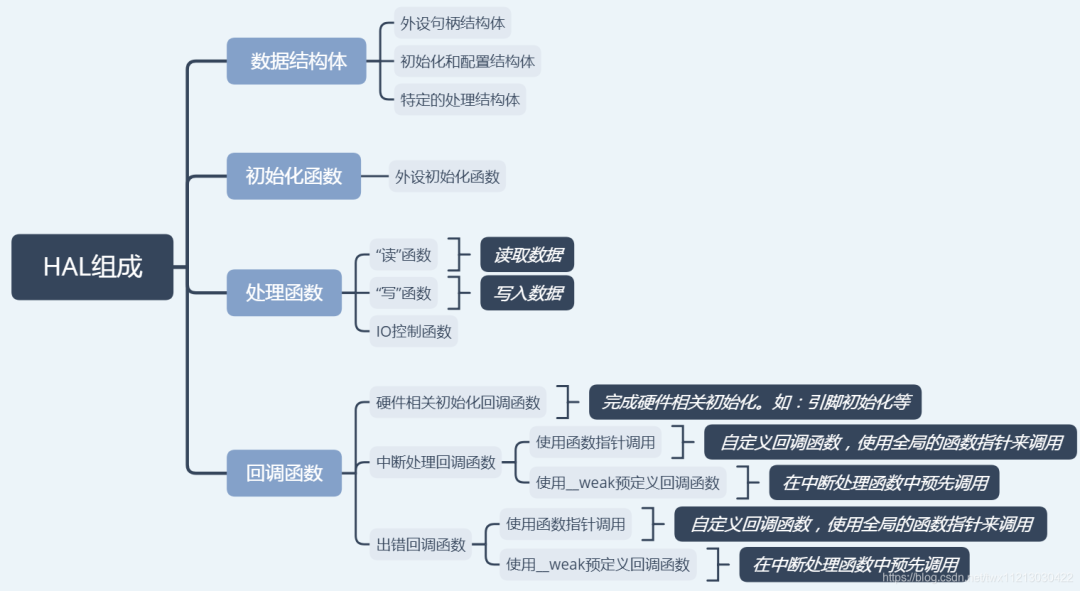
1. HAL库的数据结构体
- • 外设句柄结构体
- • 初始化和配置结构体
- • 特定的处理结构体(读写/控制)
** 外设句柄结构体(跟硬件不相关):**
比如:下面这个串口结构体
typedef struct
{
USART_TypeDef *Instance; /* USART registers base address */
USART_InitTypeDef Init; /* Usart communication parameters */
uint8_t *pTxBuffPtr;/* Pointer to Usart Tx transfer Buffer */
uint16_t TxXferSize; /* Usart Tx Transfer size */
__IO uint16_t TxXferCount;/* Usart Tx Transfer Counter */
uint8_t *pRxBuffPtr;/* Pointer to Usart Rx transfer Buffer */
uint16_t RxXferSize; /* Usart Rx Transfer size */
__IO uint16_t RxXferCount; /* Usart Rx Transfer Counter */
DMA_HandleTypeDef *hdmatx; /* Usart Tx DMA Handle parameters */
DMA_HandleTypeDef *hdmarx; /* Usart Rx DMA Handle parameters */
HAL_LockTypeDef Lock; /* Locking object */
__IO HAL_USART_StateTypeDef State; /* Usart communication state */
__IO HAL_USART_ErrorTypeDef ErrorCode;/* USART Error code */
}USART_HandleTypeDef;
初始化结构体(跟硬件相关):
比如:下面这个串口硬件相关的结构体
typedef struct
{
uint32_t BaudRate; /*!< This member configures the UART communication baudrate.*/
uint32_t WordLength; /*!< Specifies the number of data bits transmitted or received
in a frame.*/
uint32_t StopBits; /*!< Specifies the number of stop bits transmitted.*/
uint32_t Parity; /*!< Specifies the parity mode. */
uint32_t Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or
disabled.*/
uint32_t HwFlowCtl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.*/
uint32_t OverSampling; /*!< Specifies wether the Over sampling 8 is enabled or
disabled,
to achieve higher speed (up to fPCLK/8).*/
}UART_InitTypeDef;
特定的处理结构体(跟硬件有关):
比如:下面这个ADC处理处理结构体
typedef struct
{
uint32_t Channel; /*!< Specifies the channel to configure into ADC regular group.
This parameter can be a value of @ref ADC_channels */
uint32_t Rank; /*!< Specifies the rank in the regular group sequencer.
This parameter must be a number between Min_Data = 1 and Max_Data = 16 */
uint32_t SamplingTime; /*!< Sampling time value to be set for the selected channel.
Unit: ADC clock cycles
Conversion time is the addition of sampling time and processing time (12 ADC clock cycles at ADC resolution 12 bits, 11 cycles at 10 bits, 9 cycles at 8 bits, 7 cycles at 6 bits).
This parameter can be a value of @ref ADC_sampling_times
Caution: This parameter updates the parameter property of the channel, that can be used into regular and/or injected groups.
If this same channel has been previously configured in the other group (regular/injected), it will be updated to last setting.
Note: In case of usage of internal measurement channels (VrefInt/Vbat/TempSensor),
sampling time constraints must be respected (sampling time can be adjusted in function of ADC clock frequency and sampling time setting)
Refer to device datasheet for timings values, parameters TS_vrefint, TS_temp (values rough order: 4us min). */
uint32_t Offset; /*!< Reserved for future use, can be set to 0 */
}ADC_ChannelConfTypeDef;
2. HAL库公共资源
HAL Status:状态枚举
Typedef enum
{
HAL_OK = 0x00,
HAL_ERROR = 0x01,
HAL_BUSY = 0x02,
HAL_TIMEOUT = 0x03
} HAL_StatusTypeDef;
HAL Locked:用于防止共享资源被意外访问
typedef enum
{
HAL_UNLOCKED = 0x00, /*!< Resources unlocked */
HAL_LOCKED = 0x01 /*!< Resources locked */
} HAL_LockTypeDef;
公共的宏定义:NULL 和 HAL_MAX_DELAY
#ifndef NULL
#define NULL (void *) 0
#endif
#define HAL_MAX_DELAY 0xFFFFFFFF
3. HAL库中断回调函数实现说明
(1)使用 __ weak 定义好回调函数。如果用户自己重写了回调函数,那么编译器就会使用用户重写的这个回调函数。其中__ weak这个关键字是编译器定义的。
(2)使用函数指针。定义一个全局的函数指针变量,在初始化函数时将我们自定义的回调函数赋值给这个全局的函数指针变量(这一步也叫做:注册)。然后再中断函数中通过这个全局的函数指针变量来调用我们自定义的回调函数。
-
单片机复位电路详解2022-09-05 8845
-
详解单片机的内存分配2022-11-07 3175
-
STM32单片机的内存优化策略2023-08-21 4080
-
图解单片机功能与应用(完整版)2025-06-16 477
-
如何操作单片机2022-01-21 839
-
PIC单片机图解入门教程2011-05-26 2286
-
Freescale 16位单片机的地址映射2017-11-24 1809
-
51单片机如何使用动态内存2019-06-14 959
-
极简单片机最小系统制作完全图解2021-04-26 1419
-
基于51单片机6264扩展内存仿真设计(proteus仿真+程序)2021-07-22 3037
-
单片机笔记(1)--单片机概述2021-11-18 1330
-
【KEIL·单片机·扫盲贴】关于ARM单片机程序内存使用情况的细致讨论。2021-11-25 916
-
单片机的内存分配(变量的存储位置)详解2021-12-31 1240
-
单片机的内存映射图解析2023-06-22 2996
-
单片机解析g代码的方法2023-12-22 3916
全部0条评论

快来发表一下你的评论吧 !
