

开环响应、环路响应、闭环响应与相位裕度关系浅析
电子说
描述
前言
在研究运放形成的反馈系统时,相位裕度是衡量稳定性的一个重要指标。因此,明确相位裕度与运放的开环,环路,闭环响应的关系是一个重要的问题,有助于我们更好地在稳定性,功耗,速度之间进行折衷考虑。
巴克豪森判据
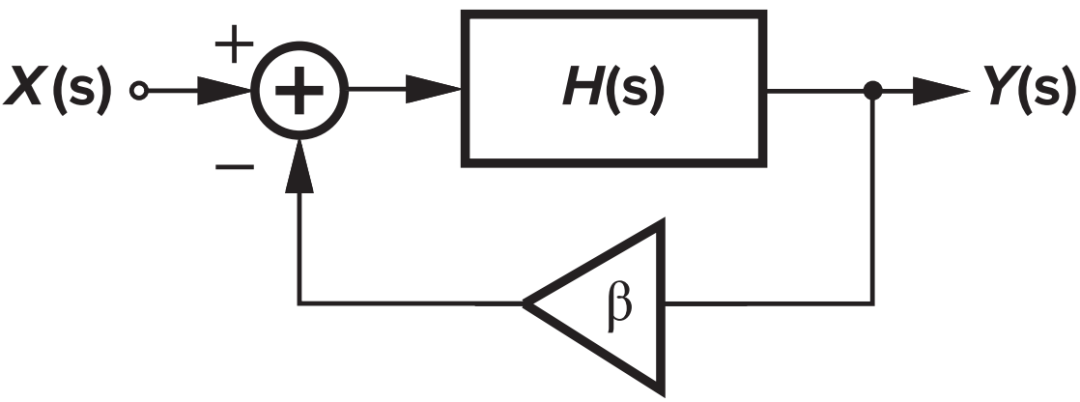
图1 基本负反馈系统
如上图所示的负反馈系统,假定图中β是频率无关的常数(β通常由电阻分压,电容分压等方式形成,大部分情况下是频率无关的),该闭环传输函数可写为 式(1) :

其中β为反馈系数,H(s)是开环响应,βH(s)为环路响应。
若在一个频率ω1处,环路响应βH(s=jω 1 )=-1,则闭环“增益”趋于无穷大,电路可以放大自身的噪声直到它最终开始振荡,该条件可以分别表达为**式(2) **和式** (3)**
上述就是 巴克豪森判据 。
从巴克豪森判据可以看出,判断反馈系统是否稳定主要取决于环路响应βH(s)。然而,有时候我们在设计运放时,通常是将开环响应GBW频率处的剩余相位当作相位裕度(即单位增益相位裕度),这是一种所有反馈系数β下的最差相位裕度。这样设计对可能使用在各种情况下的通用运放来说没问题的,但对于芯片内部一些反馈环路固定不变的情况,便会存在过设计,造成一些性能浪费,在本文的后面章节关于该问题将进行更为详细的分析。
相位裕度
使环路增益幅值等于1的频率点为“增益交点频率”,GX,使环路增益相位等于-180°的频率点为“相位交点频率”,PX。要保证系统的稳定,PX必须远于GX,且两者间距越大,反馈系统越稳定。而相位裕度PM,就是描述当GX出现时,距离PX出现剩余的相位,从而反应两者的距离。
相位裕度与开环,环路,闭环响应的关系

图2 相位裕度与开环,环路,闭环响应的关系
正如上文所言,相位裕度主要取决于环路响应,那么相位裕度和开环响应,闭环响应之间的关系是怎样的呢,本节对这个问题进行分析。本文以一个次主极点位于GBW外的两极点运放组成的反馈系统作为研究对象,如图2所示,自上至下三幅图分别为三个不同反馈系数的环路响应,闭环响应以及运放的开环相位(也为环路相位)图。图中运放的响应A即为上文反馈系统中的H。
首先观察图2(a)和图2(c),在(a)中,环路增益βA open =1(0dB)的点(GX)即为它们的曲线与横坐标的交点。从β1至β3值逐渐变大,GX出现得逐渐变晚。由于反馈系数通常小于1,因此β 3 =1是这个系统可能出现的最晚的GX。对应到图2(c)中,β1至β3对应的相位裕度PM1~PM3逐渐减小。因此可以得到结论:反馈系数越大,相位裕度越小。
由于β 3 =1,所以图2(a)中β3Aopen的曲线就是运放的开环增益曲线。我们在设计运放时,常常通过检查GBW处剩余的相位作为运放的相位裕度,实际上得到的就是该运放在β 3 =1这个相位裕度最坏情况下的值。
图2(b)中给出了反馈系统的闭环增益,从式(1)可知,开环增益Aopen与闭环增益Aclose之间的差约为环路增益βA open (取dB之前相除等于取dB之后相减),因此βA open =1(0dB)的点应为Aopen与Aclose重新交合的点(也为闭环主极点位置),如图中所示,将其对应到图2(c)后可以得到与之前相同的结论。
对运放设计的参考
我们在设计一个运放时,通常使用单位增益相位裕度作为指标进行设计。通过上文的分析可知,这种方式得到的相位裕度是运放在所有可能的反馈情况下的最差值。对于一个通用运放,运放可能被应用在各种反馈系数下,因此这样设计可以确保运放在所有反馈情况下都是稳定的。但假如对于一个固定反馈系数的运放,比如IC设计时内部各个环路使用的运放,假如反馈系数小于1,实际的相位裕度比上述方法得到的相位裕度要大,因此相位裕度实际上被过设计了,这样实际上造成了固定速度下功耗的浪费或者固定功耗下速度的浪费。
以设计两级运放为例,过设计的相位裕度导致了过设计的密勒补偿电容,从而造成输入级电流或运放带宽的浪费。
因此,对固定反馈系数的运放,实际上我们可以回归巴克豪森判据的本质,去找属于该反馈系数的环路响应的GX,从而设计相位裕度,而不是直接去设计单位增益相位裕度。
总结
本文分析了相位裕度与运放的开环响应,环路响应,闭环响应的关系,为读者在设计运放的相位裕度时提供一些理论参考,不足之处请多多指正。
-
开关电源设计中,相位裕度和瞬时响应的关系如何?2024-01-08 1612
-
【「开关电源控制环路设计:Christophe Basso 的实战秘籍」阅读体验】+第二章开环系统2025-08-16 1878
-
matlab的时域响应、频域响应命令2009-09-22 8288
-
开关电路设计中,相位裕度和瞬时响应、穿越频率的关系如何?2019-01-09 10554
-
电源设计#3 简单估算负载瞬态响应2020-07-30 4434
-
使用相位裕度分析放大器稳定性的方法2020-12-23 5614
-
开关电源重要知识:获取功率级动态响应和选择交越频率和相位裕度2021-03-10 6769
-
零输入响应与零状态响应分析2009-05-10 20008
-
光纤温湿度传感器功率响应与涂覆层厚度关系_袁愿2017-03-19 902
-
运放相位裕度的认识与理解2017-11-22 54582
-
针对幅度响应设计的有源滤波器的相位响应介绍2019-04-09 6474
-
有源滤波器中的相位响应2023-01-06 4055
-
运放的轨对轨特性、频率响应、相位裕度以及动态性能2023-10-29 3193
-
怎么使用MSO6系示波器进行环路响应测试呢?2024-05-31 1713
-
使用是德示波器完成开关电源环路响应测试的方法2025-03-18 2036
全部0条评论

快来发表一下你的评论吧 !
