

分享一下关于Linux服务器开发中相关数据去重的做法
描述
1. 海量数据去重的Hash
1.1 背景
● 在使用word文档时,word如何判断某个单词是否拼写正确?
● 网络爬虫程序,怎么让它不去爬相同的url页面?
● 垃圾邮件(短信)过滤算法如何设计?
● 公安办案时,如何判断某嫌疑人是否在网逃名单中?
● 缓存穿透问题如何解决?
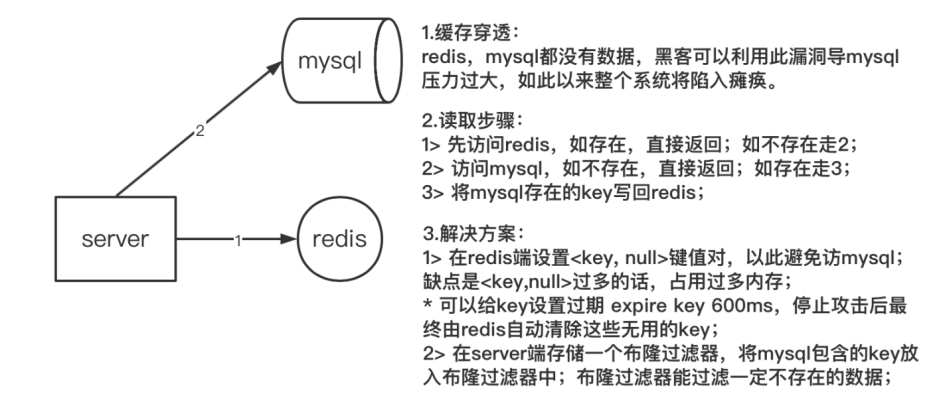
描述缓存场景,为了减轻落盘数据库(mysql)的访问压力,在server端与mysql之间加入一层缓冲数据层(用来存放热点数据);
缓存穿透发生的场景是server端向数据库请求数据时,缓存数据库(redis)和落盘数据库(mysql)都不包含该数据,数据请求压力全部涌向落盘数据库(mysql)。
数据请求步骤:如上图2的描述;
发送原因:黑客利用漏洞伪造数据攻击或者内部业务bug重复大量请求不存在的数据;
解决方法:如上图3的描述;
1.2 需求
从海量数据中查询某字符串是否存在
1.3 set和map
c++标准库(STL)中的set和map结构都是采用红黑树实现的,它增删改查的时间复杂度是o(log2n );
图结构示例:
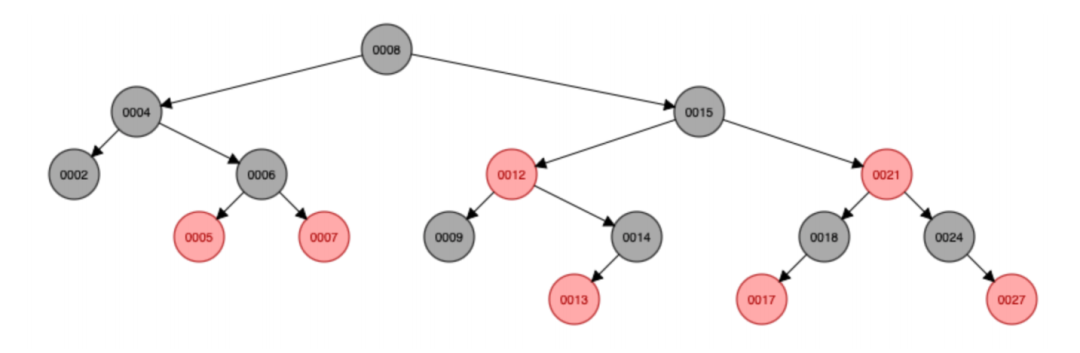
对于严格平衡二叉搜索树(AVL),100w条数据组成的红黑树,只需要比较20次就能找到该值;对于10亿条数据只需要比较30次就能找到该数据;也就是查找次数跟树的高度是一致的;
对于红黑树来说平衡的黑节点高度,所以研究次数需要考虑树的高度差,最好情况某条树链路全是黑节点,假设此时高度为h1,最差情况某条树链路全是黑红节点间隔,那么此时树高度为2*h1;
在红黑树中每一个节点都存储key和val字段,key是用来做比较的字段;红黑树并没有要求key字段唯一,在set和map实现过程中限制了key字段唯一。我们来看nginx的红黑树实现:
// 这个是截取 nginx 的红⿊树的实现,这段代码是 insert 操作中的⼀部分,执⾏完这个函数还
需要检测插⼊节点后是否平衡(主要是看他的⽗节点是否也是红⾊节点)
// 调⽤ ngx_rbtree_insert_value 时,temp传的参数为 红⿊树的根节点,node传的参数为
待插⼊的节点
void ngx_rbtree_insert_value(ngx_rbtree_node_t *temp, ngx_rbtree_node_t
*node,
{
ngx_rbtree_node_t **p;
for ( ;; ) {
p = (node->key < temp->key) ? &temp->left : &temp->right;// 这⾏很重要
if (*p == sentinel) {
break;
}
temp = *p;
}
*p = node;
node->parent = temp;
node->left = sentinel;
node->right = sentinel;
ngx_rbt_red(node);
}
// 不插⼊相同节点 如果插⼊相同 让它变成修改操作 此时 红⿊树当中就不会有相同的key了
定时器 key 时间戳
// 如果我们插⼊key = 12,如上图红⿊树,12号节点应该在哪个位置? 如果我们要实现插⼊存在
的节点变成修改操作,该怎么改上⾯的函数
void ngx_rbtree_insert_value_ex(ngx_rbtree_node_t *temp, ngx_rbtree_node_t
*node,
ngx_rbtree_node_t *sentinel)
{
ngx_rbtree_node_t **p;
for ( ;; ) {
// {-------------add-------------
if (node->key == temp->key) {
temp->value = node->value;
return;
}
// }-------------add-------------
p = (node->key < temp->key) ? &temp->left : &temp->right;// 这⾏很重要
if (*p == sentinel) {
break;
}
temp = *p;
}
*p = node;
node->parent = temp;
node->left = sentinel;
node->right = sentinel;
ngx_rbt_red(node);
}
另外set和map的关键区别是set不存储val字段;
优点:存储效率高,访问速度高效;
缺点:对于数据量大且查询字符串比较长且查询字符串相似时将会是噩梦;
1.4 unordered_map
c++标准库(STL)中的unordered_map
构成:数组+hash函数;
它是将字符串通过hash函数⽣成⼀个整数再映射到数组当中;它增删改查的时间复杂度是o(1);
图结构示例:
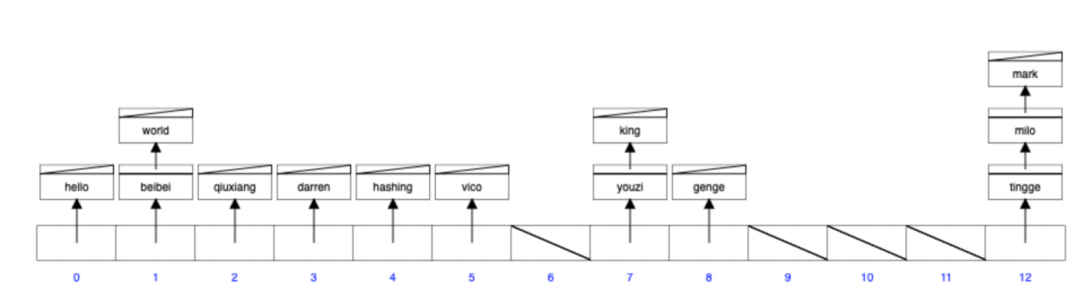
hash函数的作⽤:避免插入的时候字符串的⽐较;hash函数计算出来的值通过对数组⻓度的取模
能随机分布在数组当中;
hash函数⼀般返回的是64位整数,将多个⼤数映射到⼀个⼩数组中,必然会产⽣冲突;
如何选取hash函数?
选取计算速度快;
哈希相似字符串能保持强随机分布性(防碰撞);
murmurhash1,murmurhash2,murmurhash3,siphash(redis6.0当中使⽤,rust等⼤多数语⾔选⽤的hash算法来实现hashmap),cityhash都具备强随机分布性;测试地址如下:https://github.com/aappleby/smhasher
负载因⼦:数组存储元素的个数/数组⻓度;负载因⼦越⼩,冲突越⼩;负载因⼦越⼤,冲突越⼤;
hash冲突解决⽅案:○ 链表法引⼊链表来处理哈希冲突;也就是将冲突元素⽤链表链接起来;这也是常⽤的处理冲突的⽅式;但是可能出现⼀种极端情况,冲突元素⽐较多,该冲突链表过⻓,这个时候可以将这个链表转换为红⿊树;由原来链表时间复杂度 o(n) 转换为红⿊树时间复杂度o(log2n) ;那么判断该链表过⻓的依据是多少?可以采⽤超过256(经验值)个节点的时候将链表结构转换为红⿊树结构;○ 开放寻址法将所有的元素都存放在哈希表的数组中,不使⽤额外的数据结构;⼀般使⽤线性探查的思路解决;
当插⼊新元素的时,使⽤哈希函数在哈希表中定位元素位置;
检查数组中该槽位索引是否存在元素。如果该槽位为空,则插⼊,否则3;
在 2 检测的槽位索引上加⼀定步⻓接着检查2;加⼀定步⻓分为以下⼏种:
i+1,i+2,i+3,i+4 ... i+n
i-1^2^ ,i+2^2^ ,i-3^2^ ,1+4^2^ ...这两种都会导致同类hash聚集;也就是近似值它的hash值也近似,那么它的数组槽位也靠近,形成hash聚集;第一种同类聚集冲突在前,第二种只是将聚集冲突延后;另外还可以使用双重哈希来解决上面出现hash聚集现象:
在.net HashTable类的hash函数Hk定义如下:Hk(key) = [GetHash(key) + k * (1 + (((GetHash(key) >> 5) + 1) % (hashsize – 1)))] % hashsize在此 (1 + (((GetHash(key) >> 5) + 1) % (hashsize – 1))) 与 hashsize 互为素数(两数互为素数表示两者没有共同的质因⼦);执⾏了 hashsize 次探查后,哈希表中的每⼀个位置都有且只有⼀次被访问到,也就是说,对于给定的 key,对哈希表中的同⼀位置不会同时使⽤ Hi 和 Hj;
同样的hashtable中节点存储了key和val,hashtable并没有要求key的⼤⼩顺序,我们同样可以修改代码让插⼊存在的数据变成修改操作;
优点:访问速度更快;不需要进行字符串比较;
缺点:需要引⼊策略避免冲突,存储效率不⾼;空间换时间;
1.5 总结
红⿊树和hashtable都不能解决海量数据问题,它们都需要存储具体字符串,如果数据量大,提供不了⼏百G的内存;所以需要尝试探寻不存储key的⽅案,并且拥有hashtable的优点(不需要⽐较字符串);
2. 布隆过滤器
定义:布隆过滤器是⼀种概率型数据结构,它的特点是⾼效的插入和查询,能明确告知某个字符串⼀定不存在或者可能存在;
布隆过滤器相⽐传统的查询结构(例如:hash,set,map等数据结构)更加高效,占⽤空间更小;但是其缺点是它返回的结果是概率性的,也就是说结果存在误差的,虽然这个误差是可控的;同时它不支持删除操作;
组成:位图(bit数组)+ n个hash函数
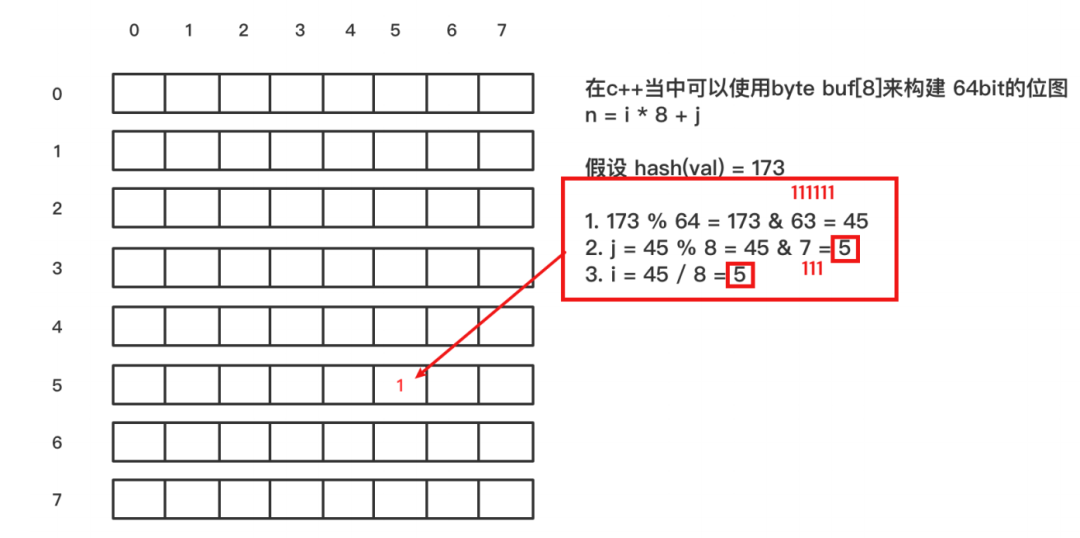
原理:当⼀个元素加⼊位图时,通过k个hash函数将这个元素映射到位图的k个点,并把它们置为1;当检索时,再通过k个hash函数运算检测位图的k个点是否都为1;如果有不为1的点,那么认为不存在;如果全部为1,则可能存在(存在误差);
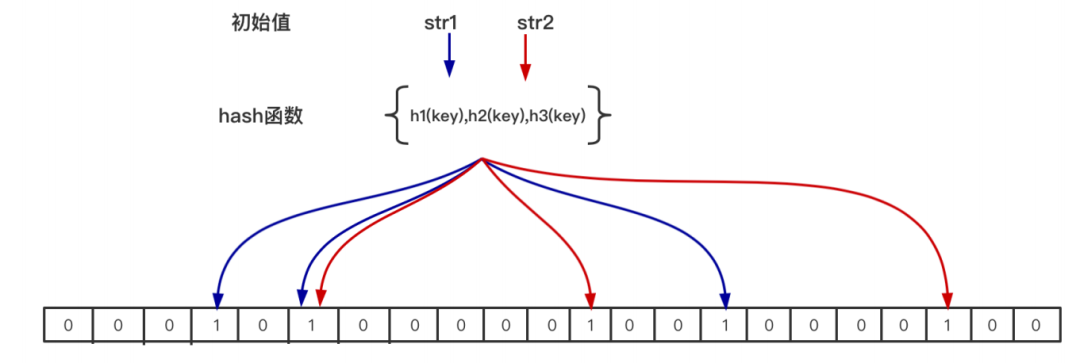
在位图中每个槽位只有两种状态(0或者1),⼀个槽位被设置为1状态,但不明确它被设置了多少 次;也就是不知道被多少个str1哈希映射以及是被哪个hash函数映射过来的;所以不⽀持删除操作;
在实际应⽤过程中,布隆过滤器该如何使⽤?要选择多少个hash函数,要分配多少空间的位图,存储多少元素?另外如何控制假阳率(布隆过滤器能明确⼀定不存在,不能明确⼀定存在,那么存在的判断是有误差的,假阳率就是错误判断存在的概率)?
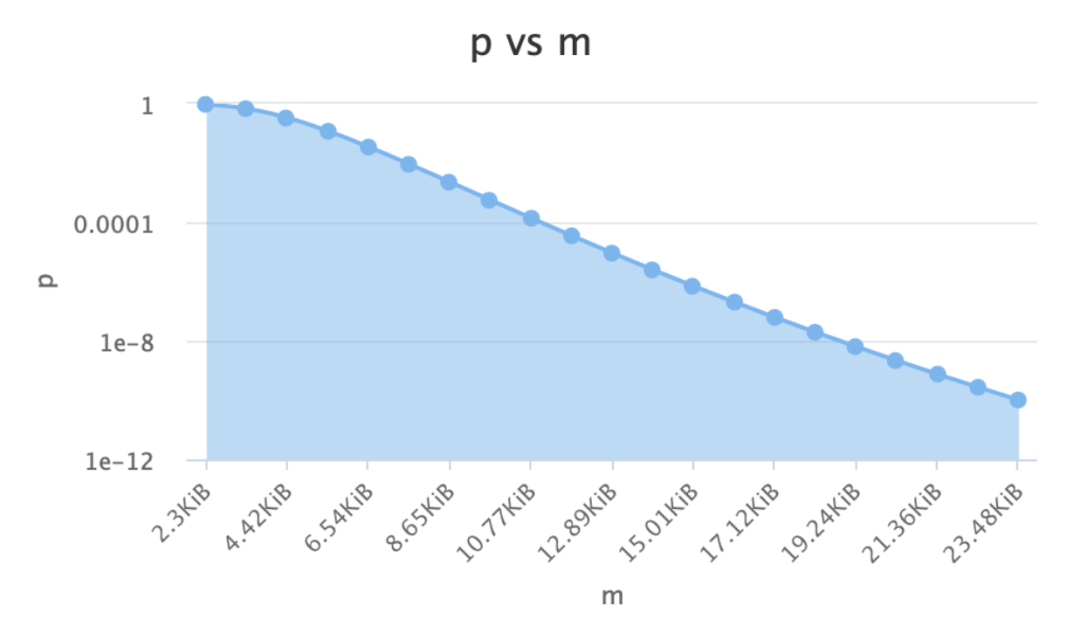
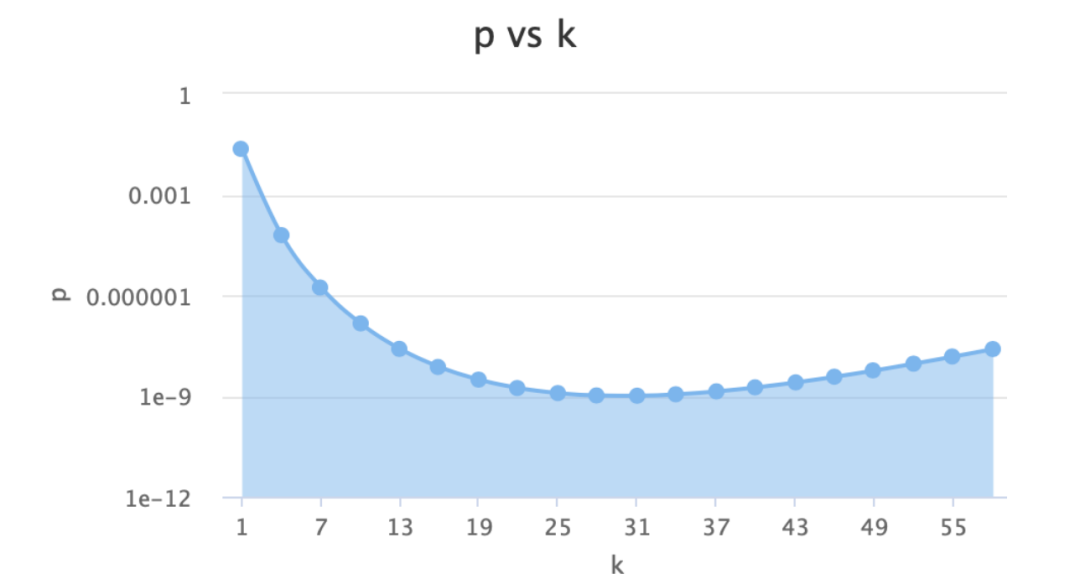
n -- 布隆过滤器中元素的个数,如上图 只有str1和str2 两个元素 那么 n=2 p -- 假阳率,在0-1之间 0.000000 m -- 位图所占空间 k -- hash函数的个数 公式如下: n = ceil(m / (-k / log(1 - exp(log(p) / k)))) p = pow(1 - exp(-k / (m / n)), k) m = ceil((n * log(p)) / log(1 / pow(2, log(2)))); k = round((m / n) * log(2));
假定我们选取这四个值为:n = 4000p = 0.000000001m = 172532k = 30
四个值的关系:
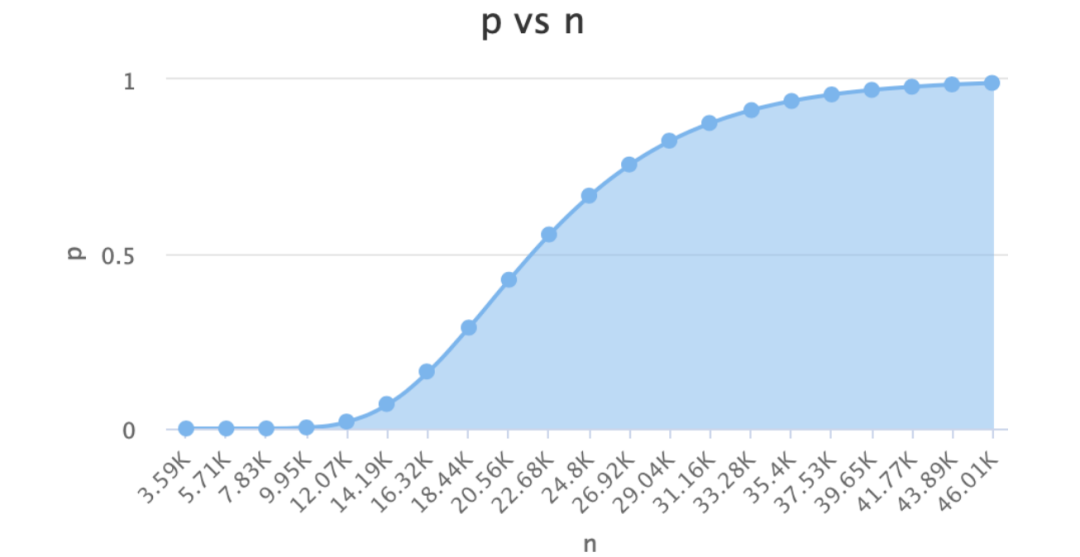
在实际应⽤中,我们确定n和p,通过上⾯的计算算出m和k;也可以在⽹站上选取合适的值:https://hur.st/bloomfilter
已知k,如何选择k个hash函数?
// 采⽤⼀个hash函数,给hash传不同的种⼦偏移值
// #define MIX_UINT64(v) ((uint32_t)((v>>32)^(v)))
uint64_t hash1 = MurmurHash2_x64(key, len, Seed);
uint64_t hash2 = MurmurHash2_x64(key, len, MIX_UINT64(hash1));
for (i = 0; i < k; i++) // k 是hash函数的个数
{
Pos[i] = (hash1 + i*hash2) % m; // m 是位图的⼤⼩
}
// 通过这种⽅式来模拟 k 个hash函数 跟我们前⾯开放寻址法 双重hash是⼀样的思路
审核编辑:刘清
-
linux服务器和windows服务器2024-02-22 384
-
求教:linux系统和WEB服务器什么关系?WEB服务器和网页又是什么关系?2017-10-10 4541
-
如何在linux服务器上使用hanlp2019-03-04 3391
-
Linux和Windows下的登录和使用Linux服务器的方式2019-07-05 1418
-
探讨一下关于STM32中的中断系统2021-08-17 1010
-
请问一下怎样去安装一种TFTP服务器呢2021-12-27 1377
-
基于Linux系统的FTP服务器的实现2013-07-24 1041
-
linux下samba服务器搭建配置2017-03-19 1076
-
简单探讨一下关于电线电缆的结构材料的相关知识2020-09-10 1347
-
Linux下Apache服务器的安装和配置2021-08-31 1108
-
如何在linux服务器中打开端口2022-10-17 13822
-
如何使用Checkmk监控Linux服务器?2023-02-17 2905
-
服务器数据恢复-LINUX下误删除/格式化的数据恢复方案2023-09-15 2022
-
服务器数据恢复—Linux网站服务器硬盘出现坏扇区的数据恢复案例2024-10-09 1084
-
服务器数据恢复—Linux系统服务器崩溃的数据恢复案例2025-05-20 1161
全部0条评论

快来发表一下你的评论吧 !
