

双目视觉的原理和应用
人工智能
描述
双目视觉(binocular vision)指利用双眼的视觉信息来获得更丰富和准确的视觉感知。这种视觉方式使我们能够感知距离、深度和方向等信息,从而更好地适应周围环境。在双目视觉的研究领域,有许多词汇,为了更好地理解双目视觉的原理和应用,下面是一些必备的词汇:
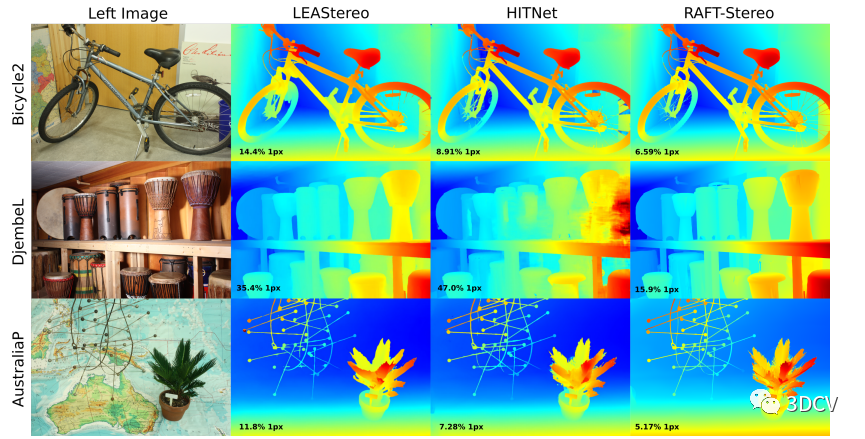
视差(Disparity):视差是指同一物体在两个图像中投影点之间的水平距离,它与物体到相机的距离成反比,因此可以用来估计物体的深度。视差图(Disparity Map)是指存储立体校正后单视图所有像素视差值的二维图像。

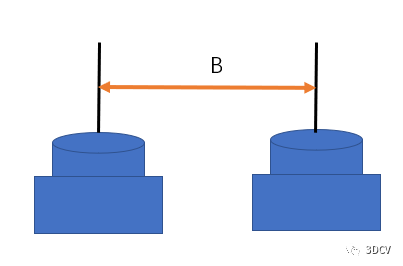
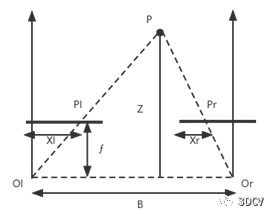
基线(Baseline):直线B为基线,它是连接两个相机光心的直线。
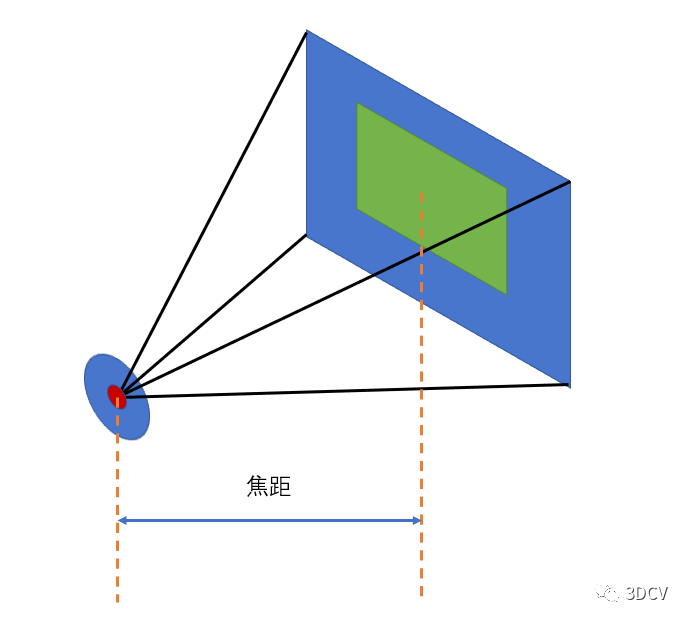
焦距:相机镜头到成像平面的距离,也就是相机的视角大小。焦距越大,相机能够看到的物体越清晰,但是也会导致视野范围变小。
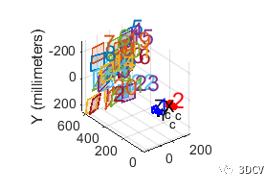
相机标定 (Camera calibration):确定相机内外参数的过程,用于将图像上的像素坐标转换为实际物理坐标。
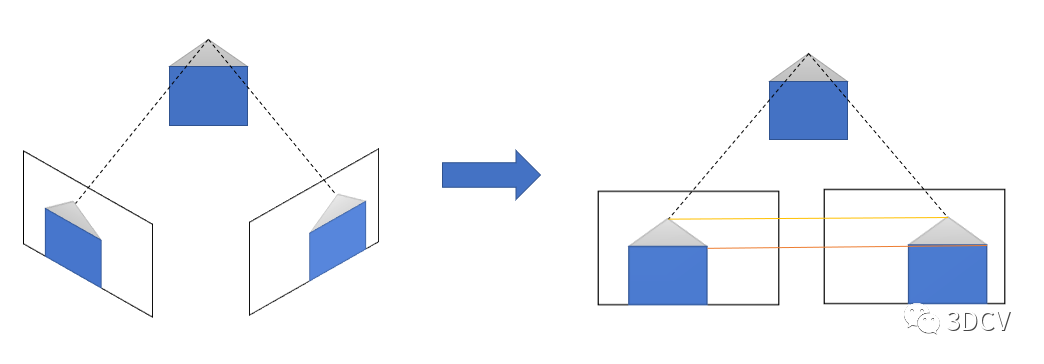
立体校正(Stereo Rectification):立体校正是一项关键的预处理步骤,它通过变换两个图像平面,使得它们共面并且与基线平行,从而将左右图像的极线对齐,并且使对应的像素在同一行上。这样,在进行立体匹配时,我们只需要在一条水平扫描线上搜索对应像素,而无需在整个图像上进行搜索。这极大地降低了计算复杂度,并提高了匹配的效率。
三角化 (Triangulation):通过测量两个视角之间的几何关系来计算三维场景中点的位置的过程。
立体匹配(Stereo Matching):立体匹配是指寻找两个图像中相同物体或场景的对应点,从而计算出它们之间的视差。立体匹配的方法有很多,可以分为基于块匹配的算法、基于特征匹配的算法、基于能量优化的算法和基于深度学习的算法等。常用的基于块匹配的方法如以SAD、SSD、NCC为代表,基于特征匹配的方法如SURF、SIFT、ORB等。
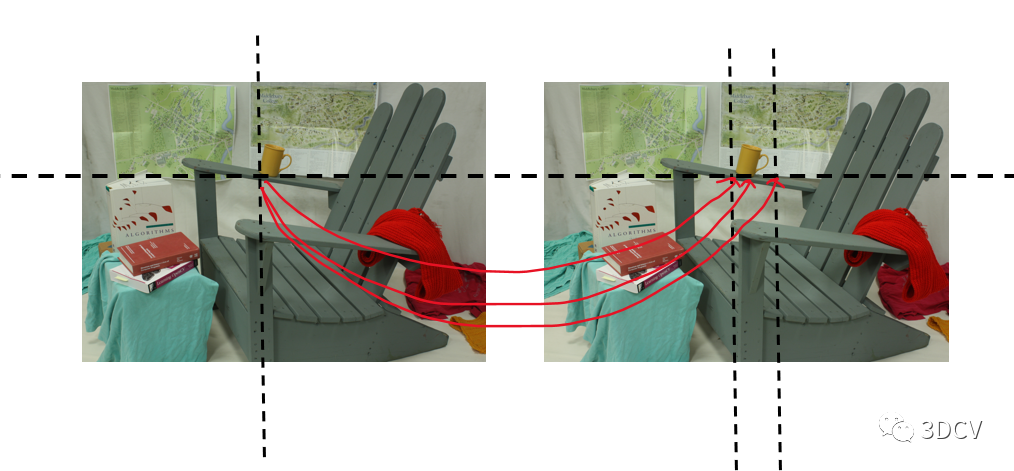
视差图(Disparity Map):视差是指同一物体在两个图像中投影点之间的水平距离,它与物体到相机的距离成反比,因此可以用来估计物体的深度。视差图是指存储立体校正后单视图所有像素视差值的二维图像。
深度图(Depth Map):深度图是指存储场景中每个像素点到相机的距离(深度)值的二维图像。深度图可以通过视差图和相机参数来计算,也可以通过其他方法如结构光、激光雷达或深度学习等来获取。
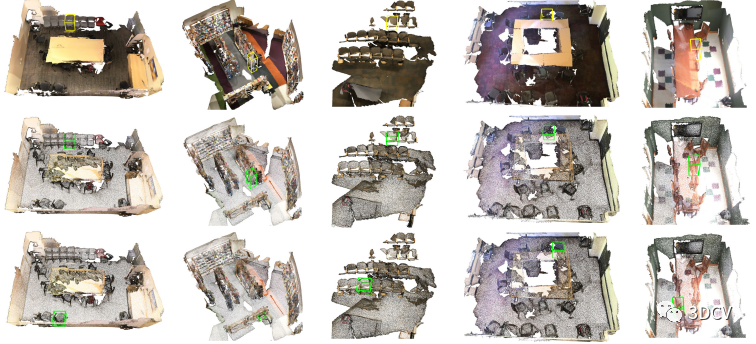
点云 (Point cloud):由许多三维坐标点组成的数据集,点云可以用于三维重建和场景分析。
编辑:黄飞
-
双目视觉在智能驾驶领域的应用2025-07-09 1611
-
基于IMX214+ZYNQ XC7Z100的1080P双目视觉智能平台2021-01-01 1659
-
双目视觉简介及算法一般流程2020-10-23 13868
-
LabVIEW双目视觉 【转载】2020-03-02 9288
-
钜芯发布业内首颗智能双目视觉芯片2017-10-26 11470
-
基于SoC的双目视觉ADAS解决方案2016-11-05 3762
-
全自主机器人垂直异构双目视觉研究2016-09-18 1088
-
全自主机器人双目视觉运动检测2016-09-06 648
-
【WRTnode2R申请】双目视觉随动平台2015-09-10 2561
-
双目视觉传感器的现场标定技术2012-03-02 993
-
基于结构光双目视觉的智能机器人系统2011-08-31 1798
-
双目视觉立体匹配算法研究2010-08-14 1475
-
基于双目视觉的跟踪机器人系统的设计2010-01-18 762
-
基于双目视觉模型的自适应控制2010-01-11 824
全部0条评论

快来发表一下你的评论吧 !
