

极海APM32F407低压伺服驱动器应用方案
工业控制
描述
作为现代工业运动控制的重要组成部分,低压伺服驱动器通过力矩、速度、位置三种方式对伺服电机进行精准控制,被广泛应用于低压供电场合、定位控制、移动供电场合等安装空间小、用电安全高的自动化应用场景中,如智能物流AGV驱动系统、风电变桨系统、人机协同的协作机器人、产线传送装置、通道闸门控制、抓取及搬运机械装置、雕刻机等。
MCU作为电机驱动系统设计的控制核心,是系统整体性能与设计的关键所在。
极海低压伺服驱动器应用方案介绍
极海APM32F407低压伺服驱动器应用方案,具有高效运算处理能力、高可靠性、高功率密度,在不同温度、湿度、振动等工业环境中可实现稳定运行,主控MCU丰富外设接口支持伺服电机系统一体化设计。
APM32F407 低压伺服驱动器方案特点:
• 速度控制模式:通过按键设定目标速度,电机转速稳定在目标速度;
• 位置模式模式:通过按键设定目标位置,电机能精准停留在设定位置;
• 编码器接口:可连接增量编码器,实现高精度控制;
• EtherCAT模块:可实现EtherCAT通信,配合PLC、PC、EC实现复杂的运动控制;
• 人机交互:读取FLASH的UI素材并显示到LCD屏,LCD能显示目标速度/位置、实际速度/位置、运行模式、运行状态,更直观地体现系统的运行情况。
APM32F407 MCU优势:
出色的运算能力
Arm®Cortex®-M4F内核,主频高达168MHz,支持单精度FPU和增强型DSP处理指令,在常温下可以进行适当超频以满足伺服控制系统uS级别电流环控制等高实时性应用。
丰富的片上资源
• 大容量存储,Flash 高达1MB,SRAM 192+4KB,可扩展内部SDRAM 2MB,支持外部存储器拓展,满足复杂系统设计需求
• 内置eMMC接口,Wait时序在100ns以内,满足与外围FPGA高效通信应用
• 内置CAN接口,实现CANopen总线协议,与PLC等主站通信
• 内置最高通信速率可达42Mbit/s的SPI接口,可快速访问EtherCAT 芯片,实现EtherCAT总线通信
丰富的应用外设,满足伺服控制系统种类繁多的外围器件的连接与应用场景,可对电机、驱动器和减速机进行一体化设计,实现更优于分立式的功率密度,充分优化系统。
高性能ADC
集成3个12位独立ADC,可对电机电流和母线电压进行精确监测,从而实现有效的闭环控制。
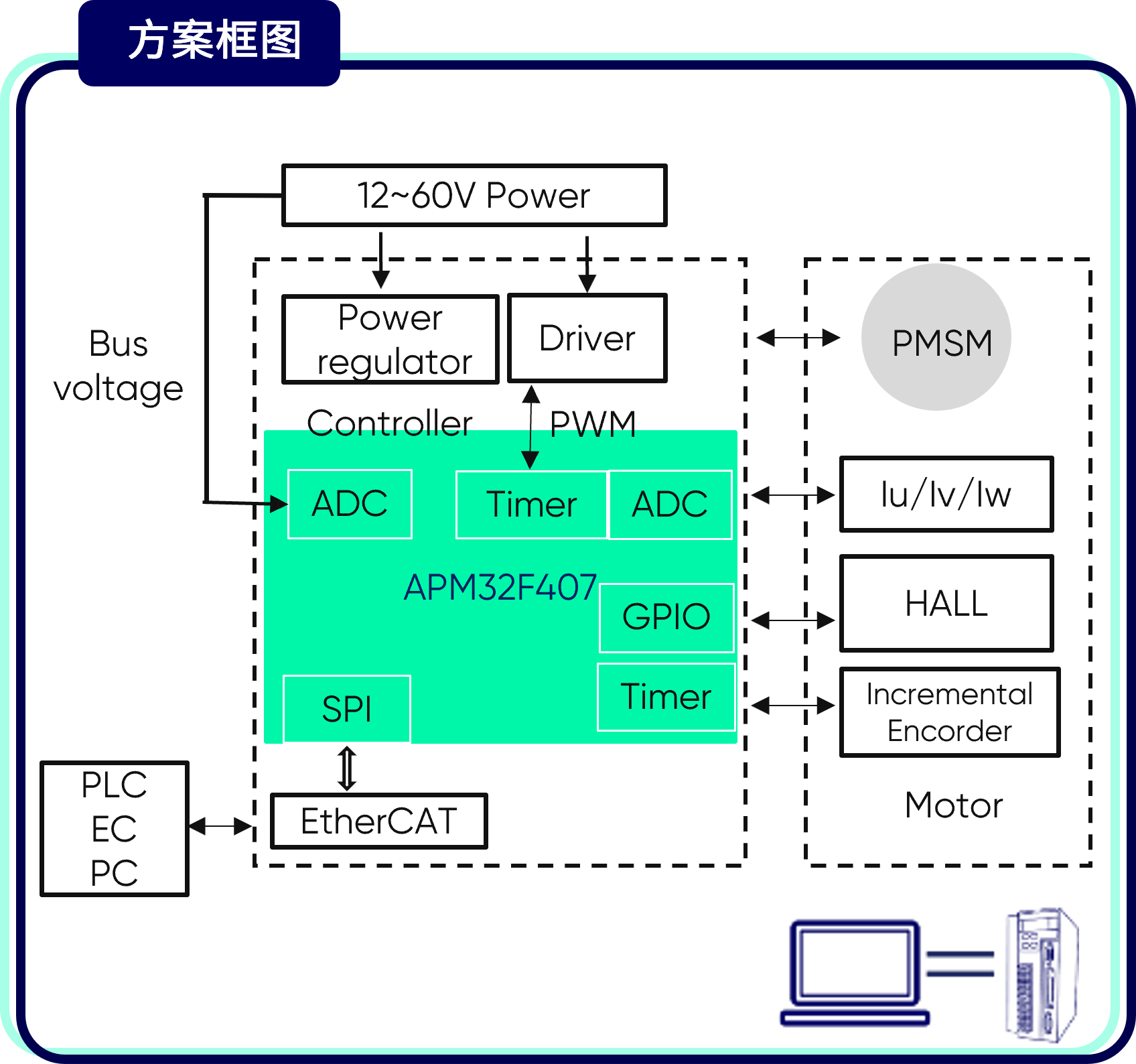
极海可提供低压伺服驱动器整个开发过程中的软硬件技术支持与demo板。整机模块工作过程如下:主控采用APM32F407高性能MCU,通过高级定时器,可输出3组互补PWM来控制PMSM电机的转动;通过3个独立ADC对电机电流和母线电压进行采样;通用定时器的编码器模式获取增量编码器的脉冲信号;通过电流环、速度环、位置环控制,实现电机速度稳定控制、位置精准控制;通过SPI访问EtherCAT从站芯片,实现EtherCAT总线通信。
APM32F407 低压伺服驱动器应用方案规格:
✓两种控制模式
速度模式:可设定目标速度,电机按照设定速度旋转。
位置模式:可设定旋转角度,电机停留在设定位置。
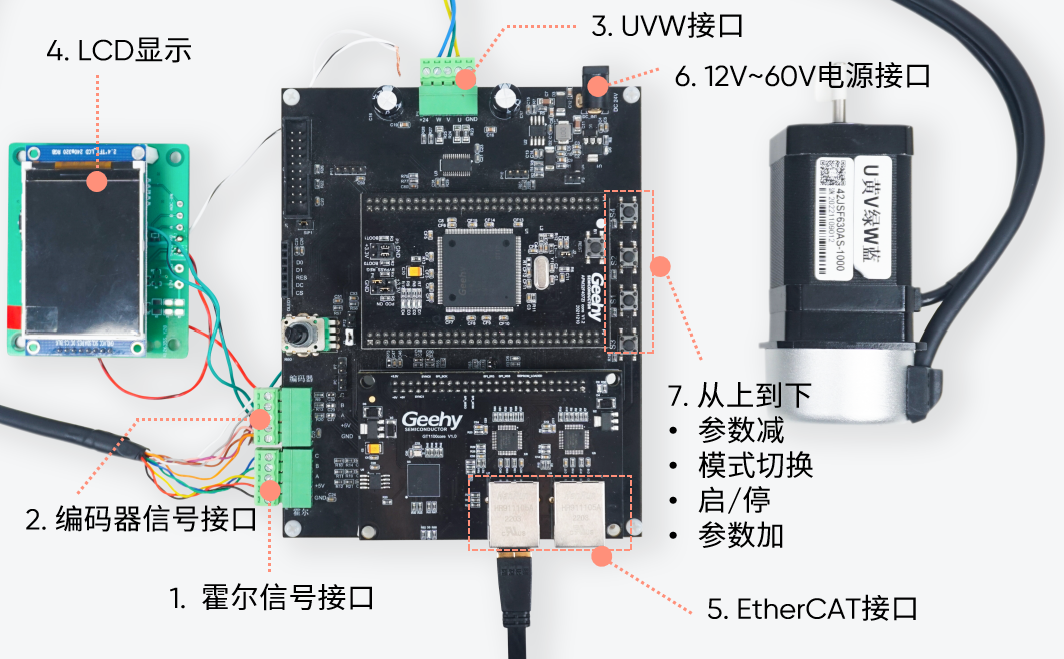
✓接口资源
1:霍尔信号接口
2:编码器信号接口
3:UVW接口
4:LCD显示
5:EtherCAT接口
6:12~60V电源接口
7:按键(从上到下):参数减,模式切换,启/停,参数加
✓控制方式
双闭环控制(速度模式)
三闭环控制(位置模式)
✓PWM频率
10KHz
✓电机转速
-3000~3000rpm(4对极)
✓位置设置范围
0~36000°
- 相关推荐
- 热点推荐
- 人机交互
- 伺服驱动器
- 电机驱动系统
- EtherCAT总线
- 增量编码器
-
极海APM32F407 uc/os3学习笔记之任务管理介绍2025-05-24 1261
-
基于APM32F407如何制作I2C EEPROM(AT24C02型号)的MDK-Keil下载算法2025-04-11 2372
-
如何在APM32F407开发板上应用uC/OS-III实时操作系统2025-04-01 1815
-
APM32F407工具链使用教程2023-10-31 2705
-
基于极海半导体APM32F407系列MCU的伺服控制器应用方案2023-09-19 2604
-
赋能高效化之路丨极海APM32F407低压伺服驱动器应用方案2023-06-20 935
-
极海APM32F407 MCU低压伺服驱动器应用方案2023-06-09 1241
-
极海APM32F407工业HMI应用方案助您增强交互体验2023-05-19 1463
-
极海智能扫地机器人应用方案2023-05-08 864
-
效率为本丨极海APM32F407通信电源方案2023-04-24 1310
-
32位微控制器APM32F405xG/APM32F407xExG2022-12-13 829
-
APM32F407 EVAL 原理图2022-11-09 783
-
求一种APM32F407伺服控制器应用方案2022-10-26 2623
-
国产优秀替代_APM32F407替代STM32F407记录2022-05-10 23690
全部0条评论

快来发表一下你的评论吧 !
